



【摘要】:在串级控制中使用了级联的控制闭环,每个回路使用一个独立的测量和一个独立的操作变量。第一级控制器的输出是第二级控制器的输入。变量配对和多个闭环的顺序能够使控制得到非常有效的实施,并且不需要利用所有状态信息。这种多环或串级控制系统如图8-10所示。图8-10 串级控制内环将会调节电动机电流,消除了转矩扰动,使电动机表现为一个转矩源。因此,串级控制的主要理念是及时反馈系统中有任何可用的信息。
完全状态信息未必能够全部获得,或者说很难直接使用。在串级控制中使用了级联的控制闭环,每个回路使用一个独立的测量和一个独立的操作变量。第一级控制器的输出是第二级控制器的输入。变量配对和多个闭环的顺序能够使控制得到非常有效的实施,并且不需要利用所有状态信息。
我们再次使用天线的伺服系统来做例子。天线最终需要指向准确的位置。位置偏差可以作为电动机的参考值,但是电动机的速度和转矩也是非常重要的变量(描述系统是如何工作的,也是系统状态的一部分)。电动机速度是可以测量的,同时电流(与转矩相关)也是可以测量的,用这些信息控制对提高系统整体性能具有很大的优势,如图7-3所示。这种多环或串级控制系统如图8-10所示。
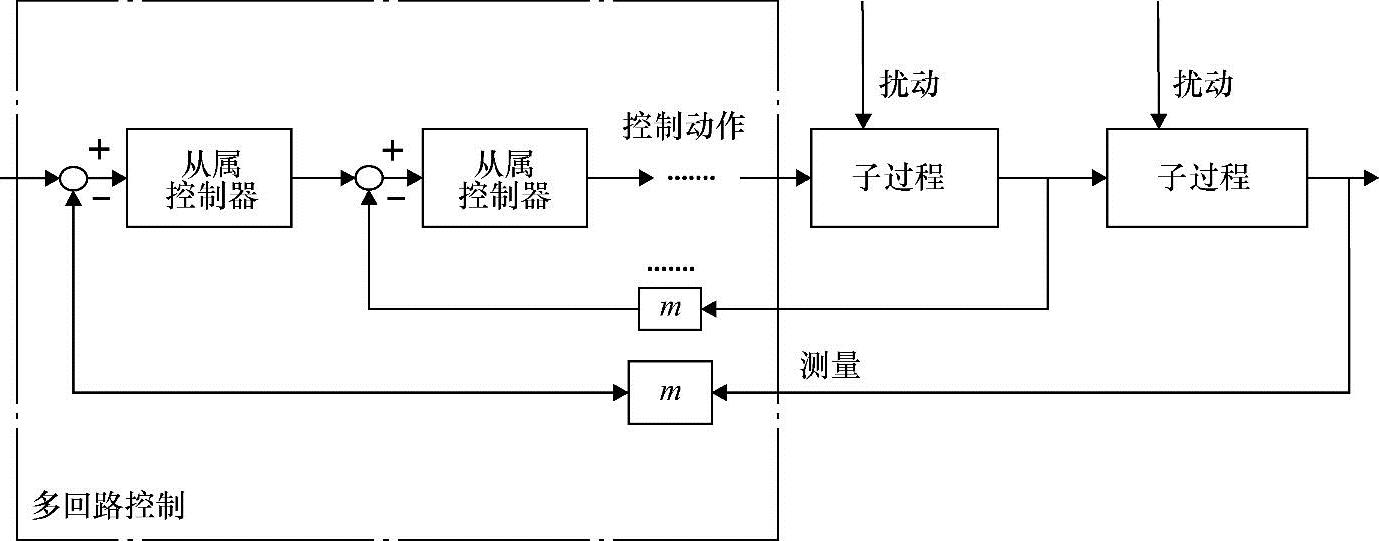
图8-10 串级控制(https://www.xing528.com)
内环将会调节电动机电流,消除了转矩扰动,使电动机表现为一个转矩源。然后,速度反馈将会提供阻尼和稳定性。外环位置控制器(主控制器)将会控制电动机轴的最终位置。系统工作良好是因为不同的闭环有不同的响应时间。内环是最快的,大约10倍于阻尼环,又比外部位置环快10倍。在频宽方面,外环具有最小的带宽,阻尼环频带宽度大约是其10倍大,而内环频宽又是一个10倍大的参数。
因此,串级控制的主要理念是及时反馈系统中有任何可用的信息。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。