



1)运算放大器 运算放大器是一种电路,输入和输出之间的增益A(假设A>105)非常大,正常输出电压以伏特为测量单位,假设输出电压小于10V,那么输入电压将小于0.1mV(10V除以105)。
当建立带有运算放大器的电路时,我们可以依靠的事实是任何一个放大器的增益都是很大的。但我们不能依靠增益的精确值。同一生产批次的运算放大器,其增益也可能大不相同。增益变化在一个数量级或者更大都是常见的。此外,增益将随着使用时间的推移和电路的温度而改变。但是,无论增益怎么变化(比如在104和107之间),其绝对数值都是很大的。并且在正常情况下运算放大器的输入电压始终保持是一个很小的数(小于1mV)。
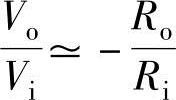
如果将一个运算放大器放置在一个负反馈结构中,即输出电压反馈到“—”端,如图7-2a所示。输出VO和输入Vi之间的增益为

这种关系等效于如图7-2b所示的结构图。因为放大器的增益是非常大的,所以无论如何,输入输出之间可近似看成:
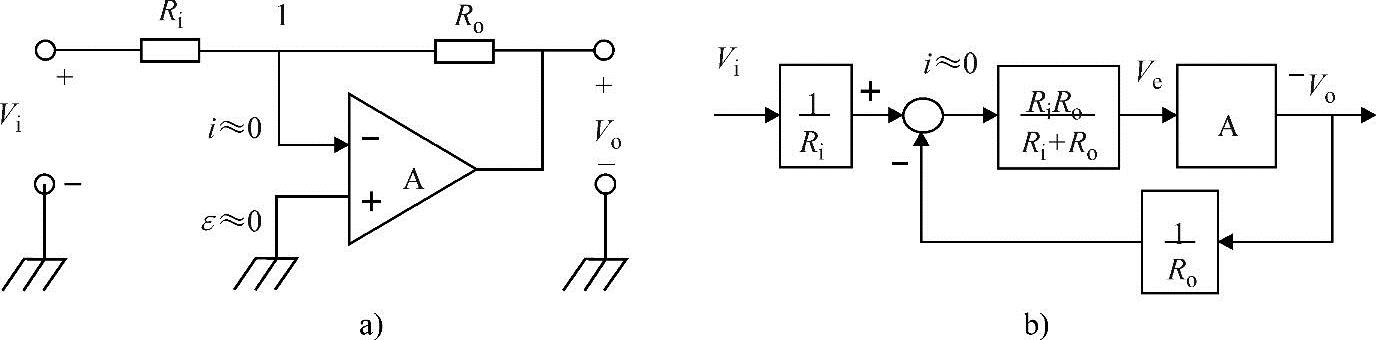
图7-2 运算放大器
在这里,放大器的实际增益并不重要,电路中VO与VI连接的其他部分也不重要(放大器大大简化了电路分析与综合),这两个电压之间的关系完全基于运算放大器周围的电阻。当我们能够确定电阻值时,输入和输出电压之间的关系也就非常明确了。正是由于负反馈的存在,才能进行如此重要的简化。运算放大器
供知晓一定电路原理的人参考:根据欧姆定律(流经电阻的电流与电阻两端的电压成正比)和基尔霍夫定律(确定电路中电压之和为零,在任意节点处电流和为零),可以容易地导出运算放大器电路的输入输出关系。如图7-2a所示,在节点1处,利用基尔霍夫定律,已知放大器的输入电流为0,有
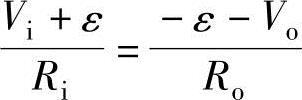
放大器的等式可以简化为Vo=Aε,在上一等式中用Vo/A替换ε,经过整理得到了式7-2。(https://www.xing528.com)
正如图7-2所示,只要增益足够大,回路的路径中存在何种原件都不是很重要,整个系统的增益为(Ro)/(Ri)。
这个结果可以扩展到任何动态反馈系统。考虑如图6-11所示,假设干扰和噪声信号是零,将会有下列关系:

因此,由于GK的增益远大于单位增益,信号输入/输出关系只决定于F和H(式7-4)。准确地设计这两个元素将给得到期望的响应,与对象或者反馈控制器无关。
‖GK‖>>1⇒y≈FH-1r(7-4)
这看起来太好了,以至于怀疑它的真实性。一般来说,确实是这样的,尽管它几乎是对的。实际上我们却不能保证GK>>1,并且对所有可能的参考信号r,我们并不能保证稳定性或者设计的合理性。但在r是某些经典的信号时,我们能够使GK足够大[3]。
当处理更加复杂的系统和运算(非线性,随机,多变量等等)时,相同的概念同样适用。
我们假设r是常值信号,F=H=1,并且不存在扰动和噪声。在这种情况下将反馈控制器K设计为一个纯积分器(在被控对象不对输入进行微分时,该积分器在GK中保留下来),无论系统何时达到稳定状态,均可以保证y=r。我们假设在设计合理的反馈中,这是正确的。事实上在稳定状态,y是常值。如图6-11所示,反馈控制器K的输入r-y也是常值。因为反馈控制器包含积分器,反馈控制器K的输入r-y必须是0。如果不是0,那么输入将会积累并且在闭环内产生无界的信号。这与稳定状态的假设是相矛盾的。
下面将以马桶例子进行对比分析。在马桶的例子中,水箱为积分器,因此水箱的液位总是被注水到一个合适的高度,这与马桶其他的部分无关。
由于这个原因,反馈控制器一般都包含积分器,因为积分器可以无误差地跟踪常数参考信号,也称之为调节器。在控制器的设计中,使输出稳定在给定的参考信号水平是一个重要的任务。所以积分被包含在大多数工业反馈控制器中,在工程或过程中无处不在。在9.3.3节中,这个概念被应用在PID[4]控制器中,而PID控制器被广泛应用在流程行业和制造行业。
很明显,如果回路增益GK非常大并且FH1≈1,那么无论被跟踪的信号是什么,反馈控制都可以提供一个很好的跟踪解决方案(尽管不总是完美)。与开环控制相比,需要一个不是很苛刻的要求:F≈G-1。反馈也不需要太多被控对象G的信息,就能获得很好的跟踪效果(其中,r是重要的,G是很小的,K应该足够大使得GK很大)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。