



当我们给电枢端加电压Ea时,暂态过后,电动机将到达稳定的轴速度ω。对于每个所施加的电压,都有电动机转矩Pm与之对应。机械负载L决定了最终的电动机速度。以这种观点分析电动机以稳定方式工作,如图6-1所示。
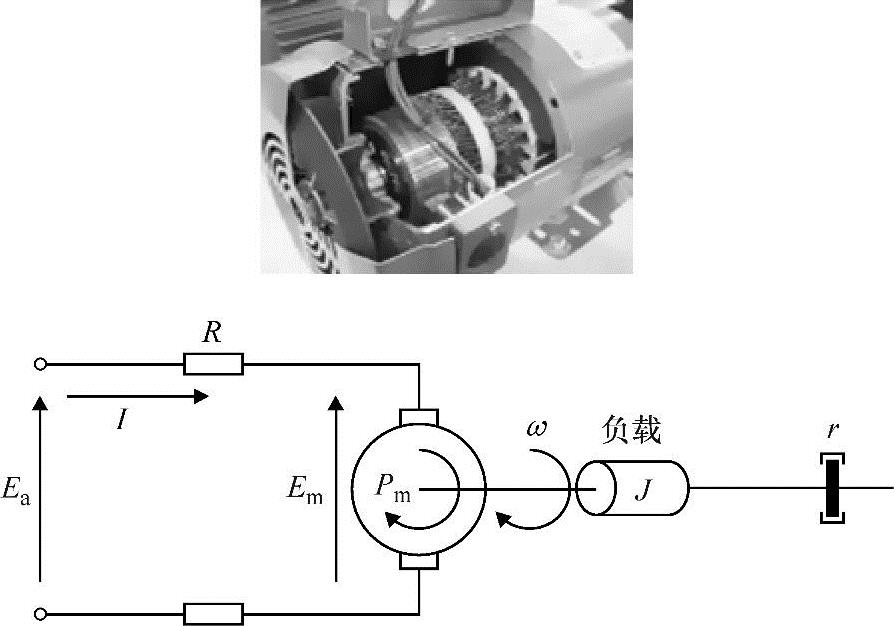
图6-1 直流电动机
在这里将敏感性定义成多大的电压变化可以影响旋转速度呢?当小的输入电压改变就可以产生大的输出速度变化时,我们就称为敏感性很大。同样,这里还可以将鲁棒性定义成当电动机轴上的机械负载变化时,电动机的转速改变多大。当机械负载变化很大,电动机转速变化很小时,我们称为系统的鲁棒性强,这是在很多应用中需要的性质。高速齿轮传动电动机符合这种情况,其中电动机速度比输出轴速度大很多(见3.4节)。
在本书中,所有对稳定性、敏感性和鲁棒性的定义都只适用于有操作限制的电动机。例如,由于电动机结构中的电磁材料具有饱和效应,所以存在一个电压上限。当电压超出电压上限时,即使再增加电压,电动机转速也不会增加。更糟糕的是,当电压超出某一值时,会破坏电动机,产生难闻的气味。通常用于控制目的的系统模型只描述感兴趣的部分,这里的电动机模型只描述了这些操作限制条件下的信号。或者说模型的有效性(因此诸如稳定性、敏感性和鲁棒性这些概念的有效性)应在彻底弄清系统工作之前搞明白。
不是所有的系统都是稳定的,还有本质上不稳定的系统。例如,一个需要小心控制才会良好运行的不稳定的机械系统的例子就是我们的身体。我们需要控制才能保证平衡的走路姿势、站立和坐下。为了行走,我们必须学习怎样去保持我们身体的平衡,尤其是确保头部处于我们脚部的正上方。机械上(在重力存在下)我们的正上方是非自然点,非稳定位置。趴在地上我们就会很稳定,但是我们无法移动。在稳定性和动态性能之间总需要一个平衡。
相似的情况,不太容易控制,使你手掌中的细长棒保持竖直,就像一级倒立摆一样,如图6-2所示[1]。(https://www.xing528.com)
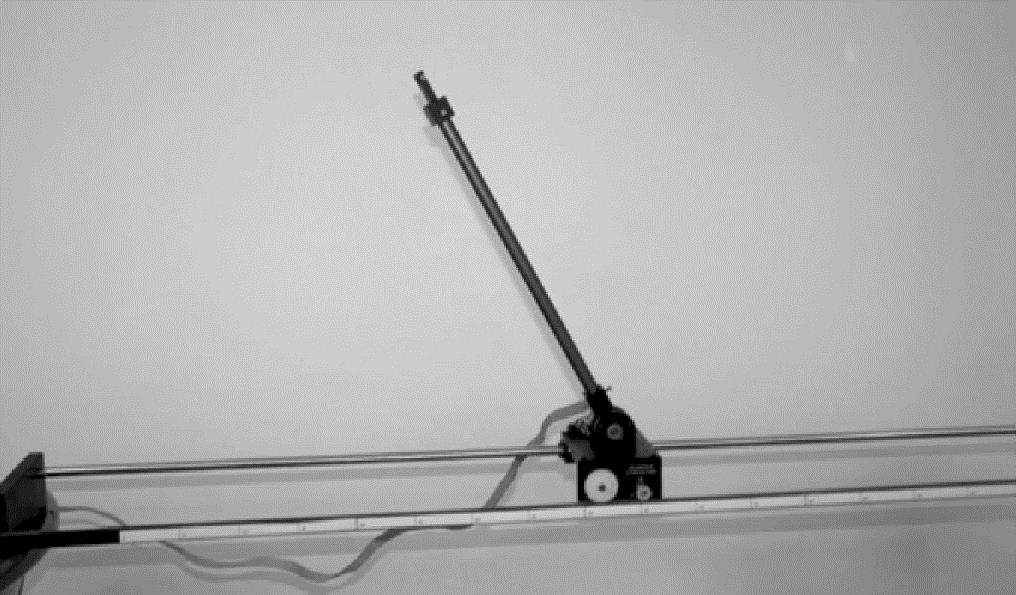
图6-2 倒立摆
显然还有与之相似的问题,如发射火箭。细长的火箭箭体必须通过底部的推力克服受到的重力来保持平衡,这需要仔细地控制推力的方向。
在一些化学过程,我们需要不稳定的平衡点(没有控制不稳定),这是因为与其他自然平衡点相比较而言。同样,在机械系统中,不稳定(当然在没有控制的系统中)也许会有极高的可操作性,因此这也是我们想要的。
一个不受限制的不稳定过程的后果是严重的,众所周知切尔诺贝利核电站的灾难性的事故。在低能量时,石墨的核裂变反应是不稳定的,这个反应应该稳定运行在高能量输出时。由于在低能量时缺乏正确的控制和足够的安全机制,造成切尔诺贝利核反应堆在1986年4月发生了大型爆炸。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。