



到目前为止,我们已经针对线性时不变系统充分探讨其输入输出的关系。在系统稳定这一假设下,输入输出关系可以用传递函数表示。但是传递函数这种表示方法太简洁,隐藏了系统内部工作机制的细节。
然而,当写系统的方程时,如果不只考虑输入输出的关系,那么必然需要引入其他变量。考虑如图5-9所示的方框图,当初始条件为0,分别定义积分器的输出变量为xi(i=1,2,3)。如果我们也引入积分器的输入(相应输出的微分),就可以很方便地将框图的方程写出。那么方程为
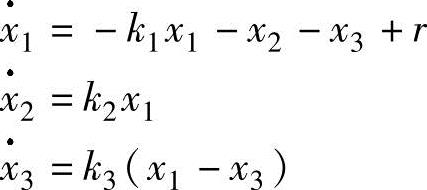
这些方程描述了积分器、增益、相加点和连接。而且系统的输出是
y=x2+x3
这些方程不仅包含了传递函数描述的输入输出关系,还描述了整个系统的特性。而且,它们适合计算机仿真。变量的集合{x}成为系统的状态。通过这些方程能够得到传递函数。它足以取代变量s(或jω)构成的表达式,而且可以消去状态变量转换为传递函数模型G(s)。
写下方程,消除变量,找到能够表示系统全部特性的标准方程形式,这个过程称为行为理论(PoldermanandWillems1998)。
更一般的情况,n个线性微分方程的集合可以简化成矩阵形式。

变量x是一个表示状态的列向量(x1,x2,…,xn),系数矩阵A称为系统矩阵;B是列向量(b1,…,bn)称为输入-增益向量;C是行向量称为输出-增益矩阵;D是标量表示输入对输出的直接作用。系统矩阵表现了系统的内部结构,并决定了很多基本的性质(见下章)。而输入-增益和输出-增益矩阵能够通过增加、删减、修正一些执行器(用于控制)/传感器(用于测量)来进行修改。直接耦合(D)通常为0。从输入输出的观点看,矩阵(A,B.C,D)的集合等价于传递函数[13]。(https://www.xing528.com)
通过状态空间模型,我们可以计算整个系统的行为.如果已知u(t)=0,初始状态x0=x(t0),那么就可以计算系统状态随时间的变化,这称为系统的自由响应。在处理自治系统时,这是非常有趣的。另一方面,如果初始条件不存在,那么系统对于某给定输入的响应—动力响应是可估计的。这正是我们通过传递函数得到的系统输出。
状态变量具有以下有趣的性质:
●记忆性:状态是过去的总结。通过过去的状态和未来的输入可以计算未来的状态。
●动态性:输入直接影响状态向量的导数(变化),所以状态的当前值与输入的当前值无关(也不可以通过状态的定义)。
●完整性:如果状态的当前值、输入的当前值和未来值都已知,那么我们可以计算出任何内部变量。
●非唯一性:状态表示方法是不唯一的。给定一个状态表示,我们可以通过坐标变换(同一空间不同性质的表示),或增多变量的个数(状态向量的任意线性组合可以添加到状态中)得到一整类同等的表示,这并不改变系统的输入输出描述。
●最小维数:状态向量具有最小维数,其他所有形式的维数都比状态空间的维数多。
通常情况下,我们可以使状态向量代表简单的物理意义。在任何的机电系统中,我们可以将状态看成是储存的能量。在机械装置中,状态可以被看成动能或势能;在电气系统中,我们将状态看成电能存储器件的电场和磁场能量。如图2-13所示中弹簧球的例子,如果球的位置和速度在任意给定时刻都是已知的,那么其行为可以完全确定。这两个变量被定义为状态向量,请注意这些变量表示动能和势能。这种属性同样也用于分析系统的行为。在许多其他的例子中,比如世界经济系统的描述,状态可以没有任何实际的物理意义。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。