



在前面的章节中介绍了直接使用PLC的高速输出点控制步进电动机,其实直接使用PLC的高速输出点控制伺服电动机的方法与之类似,只不过后者略微复杂一些,下面将用一个例子介绍具体的方法。
【例3-5】某设备上有一套伺服驱动系统,伺服驱动器的型号为MR-E-A,伺服电动机的型号为HF-KE13W1-S100,是三相交流同步伺服电动机,要求:压下按钮SB1时,伺服电动机带动系统X方向移动,压下按钮SB2时,伺服电动机带动系统X负方向移动,碰到SQ2时停止,当压下SB3和SB4,伺服系统停机。请画出I/O接线图并编写程序。
【解】
1.主要软硬件配置
①1套STEP7-Micro/WIN V4.0 SP9。
②1台伺服电动机,型号为HF-KE13W1-S100。
③1台伺服驱动器,型号为MR-E-A。
④1台S7-224XPsi PLC。
2.伺服电动机与伺服驱动器的接线
伺服系统选用的是三菱MR系列,伺服电动机和伺服驱动器的连线比较简单,伺服电动机后面的编码器与伺服驱动器的连线是由三菱公司提供的专用电缆,伺服驱动器端的接口是CN2,这根电缆一般不会接错。伺服电动机的电源线对应连接到伺服驱动器的接线端子上,接线图如图3-34所示。
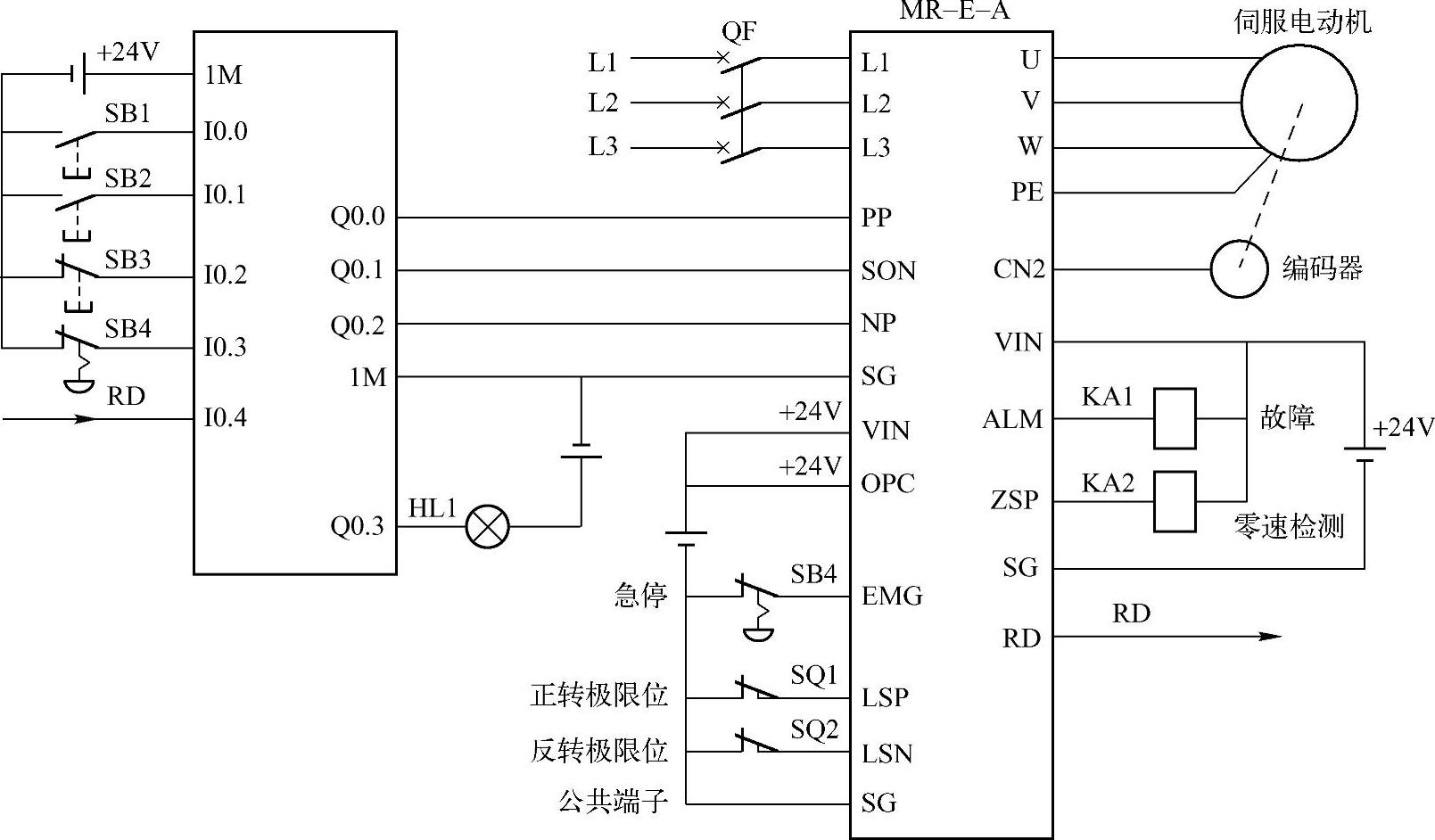
图3-34 PLC的高速输出点控制伺服电动机
3.PLC伺服驱动器的接线
本伺服驱动器的供电电源可以是三相交流230 V,也可以是单相交流230 V,本例采用单相交流230 V供电,伺服驱动器的供电接线端子排是CNP1。PLC的高速输出点与伺服的PP端子连接,PLC的输出和伺服驱动器的输入都是NPN型,因此是匹配的。PLC的1M必须和伺服驱动器的SG连接,达到共地的目的。
【关键点】连线时,务必注意PLC与伺服驱动器必须共地,否则不能形成回路;此外,三菱的伺服驱动器只能接受NPN信号,因此在选择PLC时,要注意选用NPN输出的PLC,西门子的S7-200 PLC目前只有一款(CPU 224XPsi)是NPN输出。若读者一定要选用PNP输出PLC,则需要将信号进行转换,通常处理信号比较麻烦而且效果要差一些。
4.伺服电动机的参数设定
用PLC的高速输出点控制伺服电动机除了接线比用PLC的高速输出点控制步进电动机复杂外,后者不需要设置参数(细分的设置除外),而要伺服系统正常运行,必须对伺服系统进行必要的参数设置。参数设置如下:(https://www.xing528.com)
①P0=0000,含义是位置控制,不进行再生制动。
②P3=100,含义是齿轮比的分子。
③P4=1,含义是齿轮比的分母。
④P41=0,含义是伺服ON、正行程限位和反行程限位都通过外部信号输入。
虽然伺服驱动器的参数很多,但对于简单的应用,只需要调整以上几个参数就足够了。
【关键点】设置完成以上参数后,不要忘记保存参数,伺服驱动器断电后,以上设置才起作用。此外,有的初学者编写程序时输入的脉冲数较少,而且齿轮比P3/P4又很小,发现系统运行后,伺服电动机并未转动,从而不知所措,其实伺服电动机已经旋转,只不过肉眼没有发现其转动,读者只要把输入的脉冲数增加到足够大,将齿轮比调大一些,就能发现伺服电动机的旋转。
5.控制程序的编写
用PLC的高速输出点控制伺服电动机的程序与用PLC的高速输出点控制步进电动机的程序类似,这里不作过多的解释,其程序如图3-35所示。
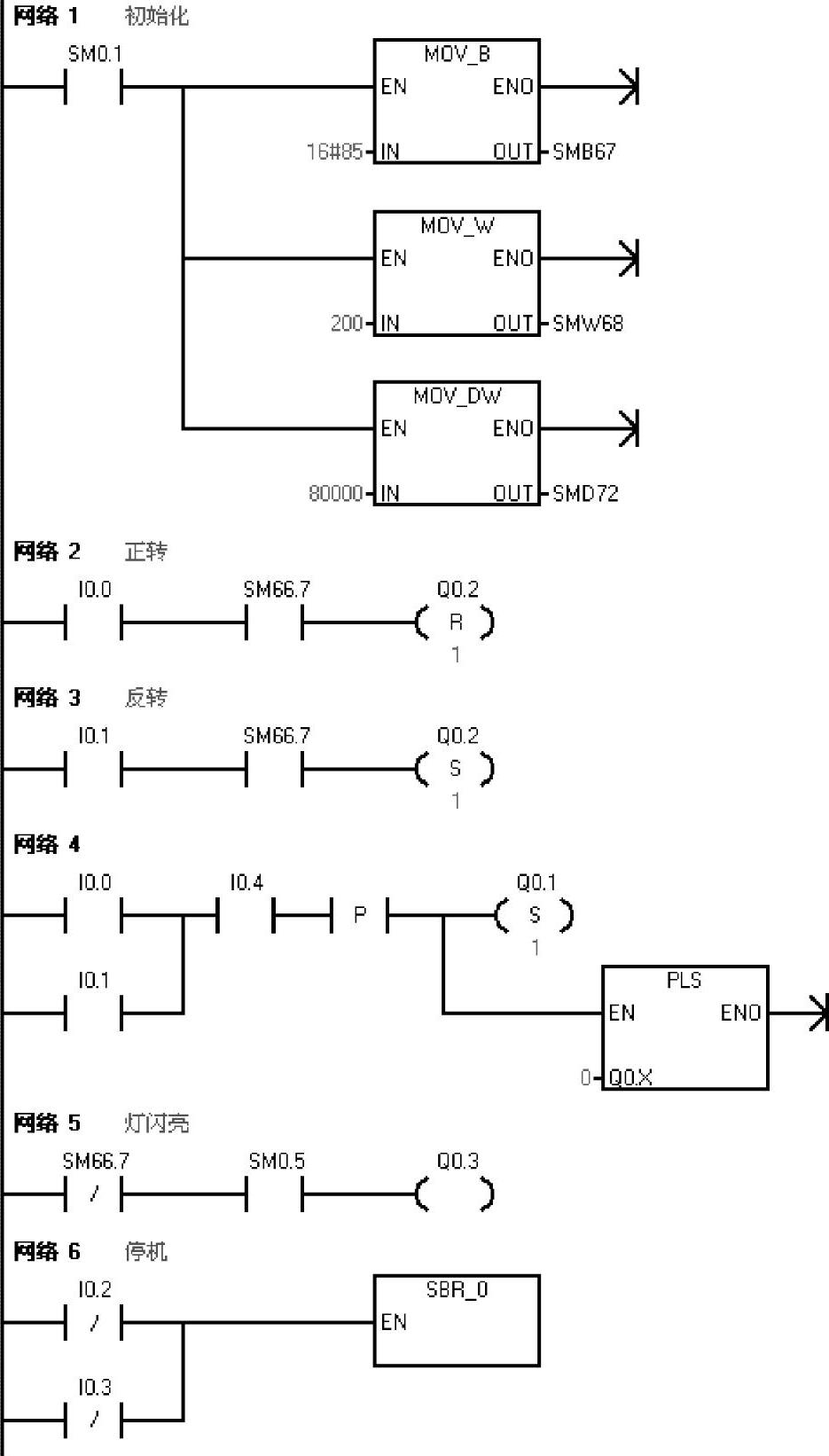
图3-35 a)PLC的高速输出点控制伺服电动机主程序
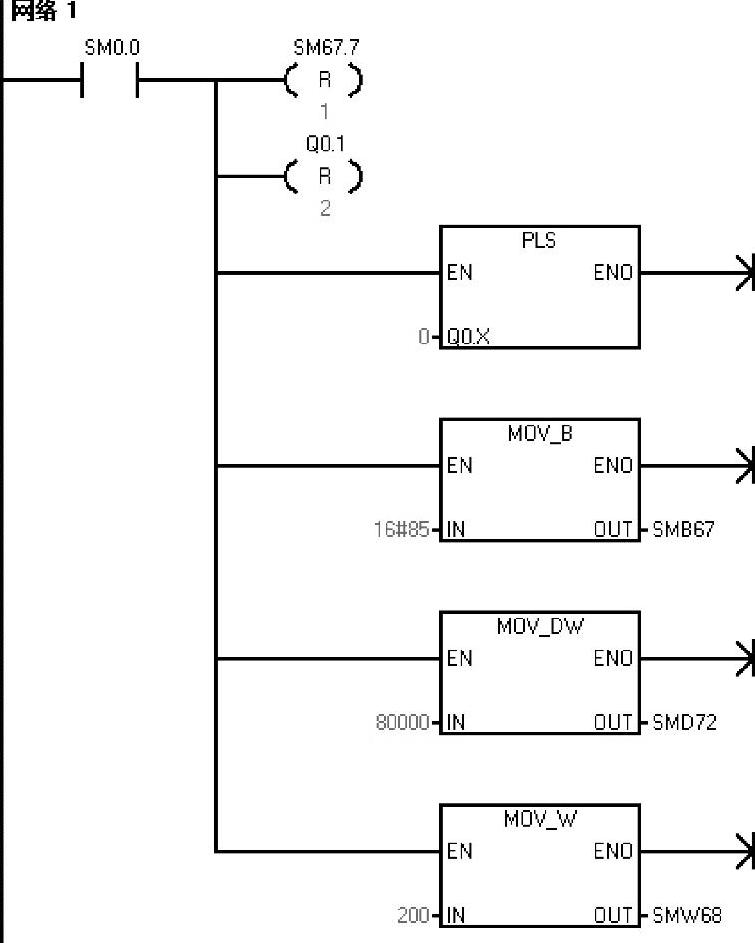
图3-35 b)PLC的高速输出点控制伺服电动机子程序
当完成系统接线、参数设定和程序下载后,压下按钮SB1时,伺服电动机正转,压下SB3或者SB4伺服电动机停转,压下SB2按钮伺服电动机反转。当系统碰到行程开关SQ1或者SQ2时,伺服电动机也停止转动。
6.信号的变换问题
众所周知西门子的PLC的晶体管输出多为PNP型(CPUX224XPsi为NPN输出,是最近才推出的新品),而三菱的伺服驱动器多为NPN输入,很显然,三菱的驱动器不能直接接收西门子的PNP信号。解决问题的方案就是将西门子的PLC的信号反相,如图3-36所示,PLC的Q0.0输出的信号经过晶体管SS8050后变成伺服驱动器可以接收的信号,从PP端子输入。
【关键点】需要指出的是对于要求不高的系统可以采用此解决方案,因为PLC输出的脉冲信号经过晶体管处理后,其品质明显变差(可用示波器观看),容易丢脉冲,因此最好还是选用NPN输出的PLC控制三菱的伺服驱动系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。