



既然利用S7-200系列PLC的高速输出点可以控制步进电动机,那么为什么还要使用定位模块呢?原因在于:
①S7-200系列PLC要用其高速输出点控制步进电动机,必须具备两个条件,一是PLC必须要有高速输出点,二是输出点必须是晶体管输出。
②PLC集成的高速输出点的频率不够高,以CPU226为例,其最高频率只有20kHz,其使用范围有限,而定位模块EM253的最高频率达到200kHz。
③从示波器观测波形就可以看出,定位模块高速脉冲的波形品质明显优于PLC内部集成的高速输出点,因此对于要求较高的控制系统必须使用定位模块。
④PLC集成的高速输出点的功能也不够强大。
1.定位模块EM253简介
相对集成在PLC的高速输出点,定位模块EM253的功能强大,定位精度高,使用更加方便,具体特点如下:
①用于位置开环控制回路中,不用于闭环位置模式。用于1.1版本以上的CPU22X的扩展模块,但由于CPU221自身不能带扩展模块,所以EM253不能作为CPU221的扩展模块。
②可提供12Hz~200kHz的脉冲频率。
③支持直线和S曲线。
④提供了螺距补偿功能。
⑤有绝对式、手动式和相对式等多种工作模式。
⑥有4种回原点的方式。
EM253定位模块的外形如图3-15所示。其各接线端子

图3-15 EM253模块外形图
的定义见表3-8。
表3-8 接线端子的定义

EM253定位模块指示灯的状态见表3-9。
表3-9 EM253定位模块的接线端子或指示灯

以下用一个例子来讲解EM253模块的使用。
【例3-2】某设备上有一套步进驱动系统,步进驱动器的型号为SH-2H042Ma,步进电动机的型号为17HS111,是两相四线直流24V步进电动机,要求:压下按钮SB1时,步进电动机带动X方向运动,步进电动机上有两个限位开关。请画出I/O接线图并编写程序。
2.软硬件的配置和接线图
(1)主要软硬件配置
①1套STEP7-Micro/WINV4.0。
②1台步进电动机,型号为17HS111。
③1台步进驱动器,型号为SH-2H042Ma。
④1台CPU226CN。
⑤1台EM253模块。
(2)步进电动机与步进驱动器的接线
本系统选用的步进电动机是两相四线的步进电动机,其型号是17HS111,这种型号的步进电动机的出线接线图如图3-16所示。其含义是:步进电动机的4根引出线分别是红色、绿色、黄色和蓝色;其中红色引出线应该与步进驱动器的A+接线端子相连,绿色引出线应该与步进驱动器的A-接线端子相连,黄色引出线应该与步进驱动器的B+接线端子相连,蓝色引出线应该与步进驱动器的B-接线端子相联。
(3)EM253定位模块与步进驱动器的接线
步进驱动器的脉冲输入端子与定位模块的P0脉冲输出端子相连,步进驱动器的方向控制端子与P1端子相连,而步进驱动器的V-端子和EM253的M端子相连,达到共地的目的。由于本驱动器没有使能端子所以EM253的DIS端子不接线。
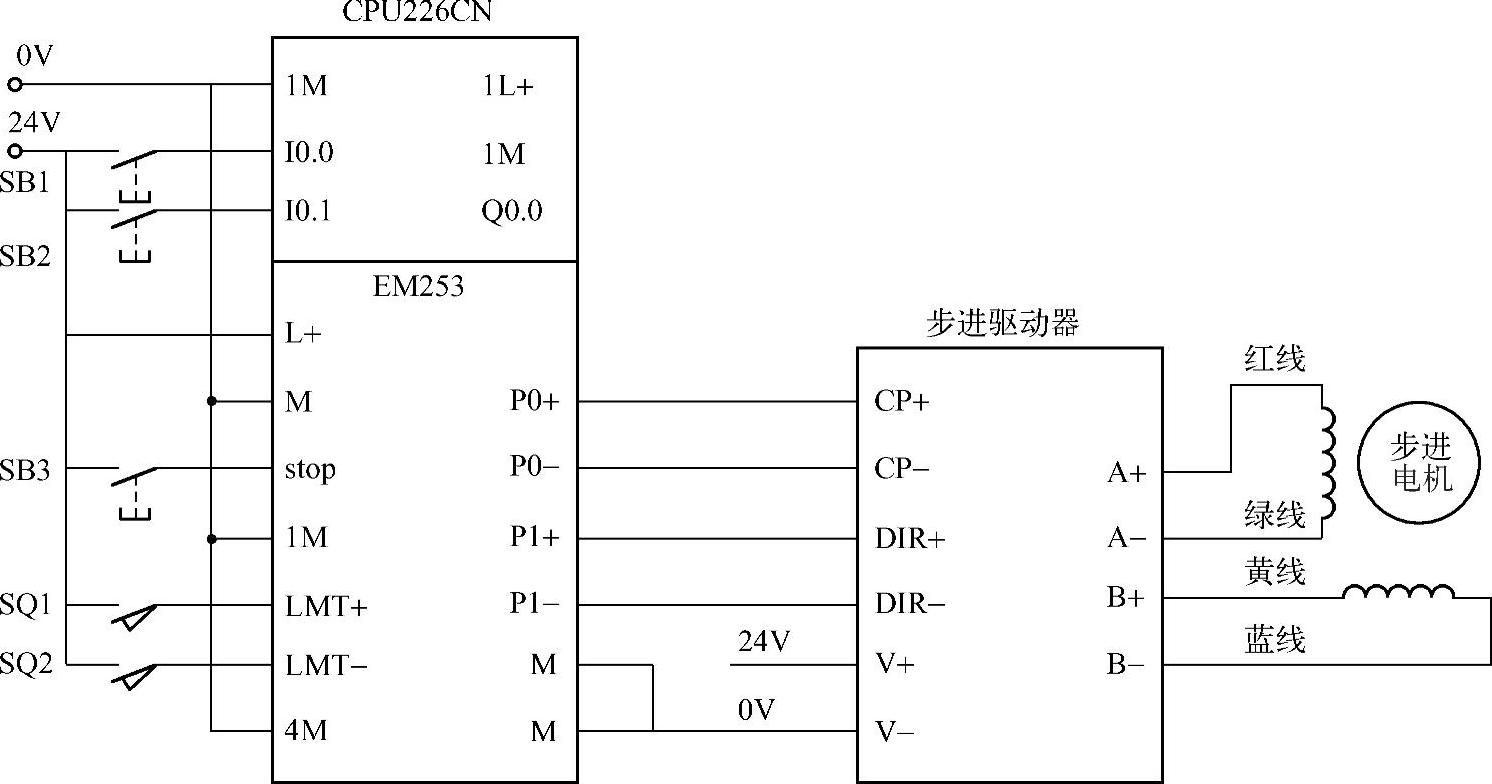
图3-16 PLC与驱动器和步进电动机接线图
3.系统的硬件组态
(1)打开“位置控制向导”配置工具
启动软件STEP7-MicroWIN V4.0,单击导航条中的“工具”按钮,再单击“位置控制向导”按钮,弹出“位置控制向导”界面,如图3-17所示,也可以通过单击主菜单下的“位置控制向导”子菜单实现。

图3-17 位置控制向导
(2)选择位置配置模式
先选定“配置EM253的位置模块操作”,再单击“下一步”按钮。
(3)读取定位模块EM253的逻辑位置
先设定模块的位置,由于只有一个扩展模块,所以模块位置为0,再单击“读取模块”按钮,弹出位置“4”处的信息,再单击“下一步”按钮,读取定位模块EM253的逻辑位置如图3-18所示。
(4)输入系统的测量单位
先在标记“1”处输入电动机转一周应输出的脉冲数,再在标记“2”处输入基准测量单位,本例为“mm”,再在标记“3”处输入电动机旋转一周产生多少“mm”的运动,这个数值与机械结构有关,最后单击“下一步”按钮,如图3-19所示。
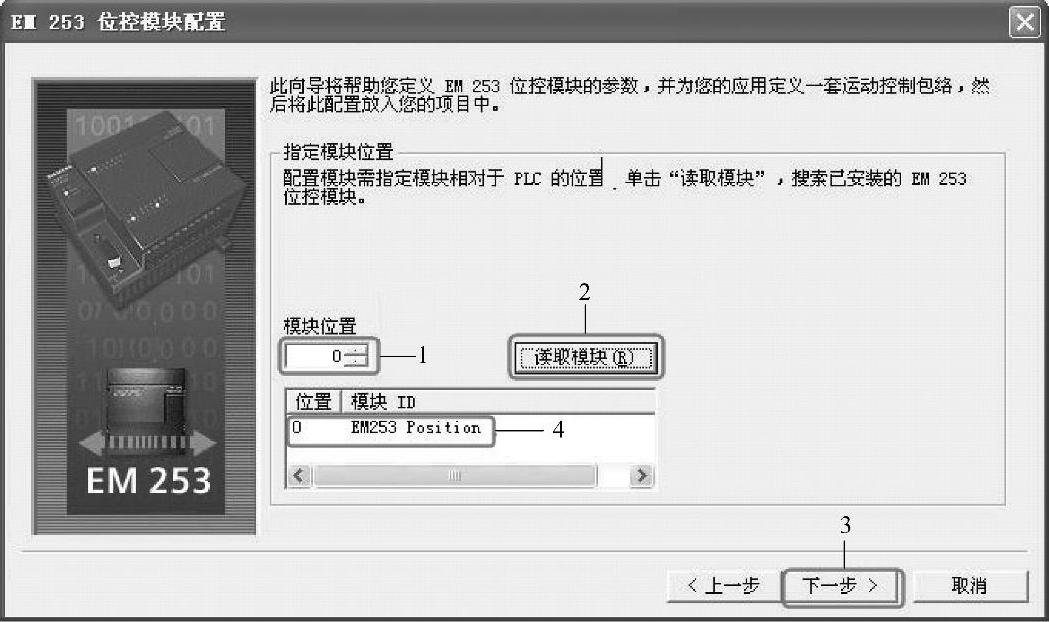
图3-18 读取定位模块EM253的逻辑位置
(5)定义模块输入信号LMT+、LMT和STP的功能
本例选择的都是“减速停止”,当然也可根据实际需要选择“立即停止”或者“不停止”选项,如图3-20所示。
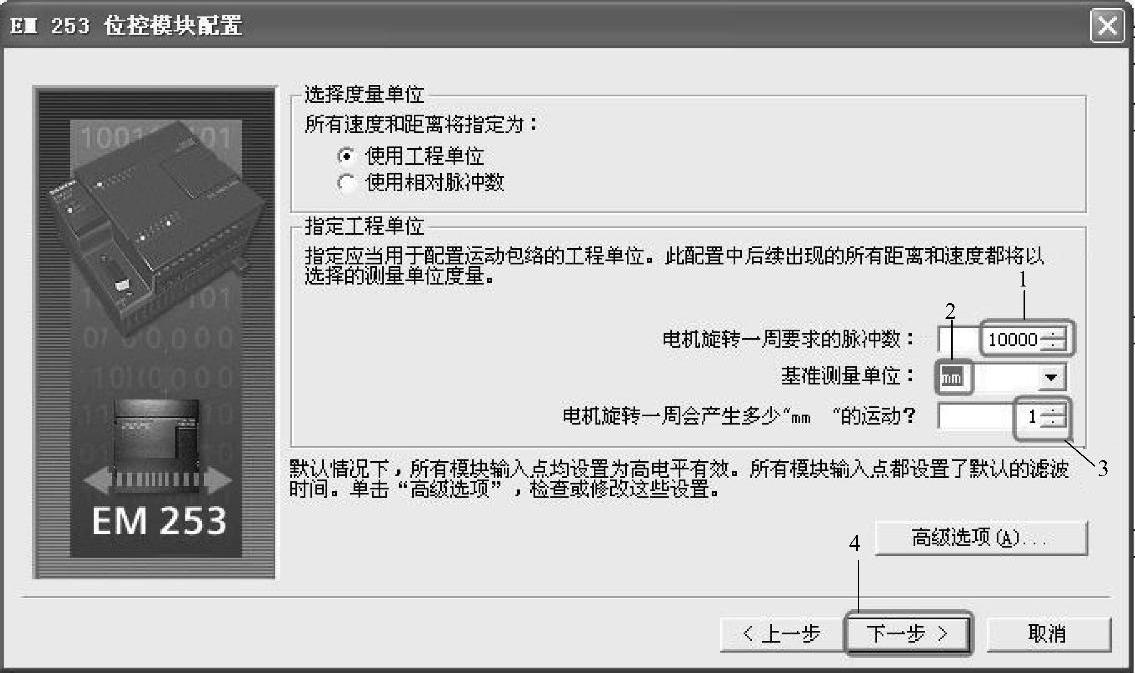
图3-19 输入系统的测量单位(https://www.xing528.com)

图3-20 定义模块输入信号LMT+、LMT和STP的功能
(6)定义电动机速度
根据需要定义电动机的最大速度、最低速度以及启动/停止速度,再单击“下一步”按钮,如图3-21所示。

图3-21 定义电动机速度
(7)定义手动操作的参数
设定点动时,电动机的速度,再单击“下一步”按钮,如图3-22所示。

图3-22 定义手动操作的参数
(8)加减速参数设定
加速时间就是从最低速度加速到最大速度所用的时间,设置在标记“1”处,减速时间就是从最高速度加速到最低速度所用的时间,设置在标记“2”处,再单击“下一步”按钮,如图3-23所示。
(9)设置运动位置拐点参数
指定补偿时间,若不补偿则输入0,再单击“下一步”按钮,如图3-24所示。
(10)设置模块寻找原点位置参数
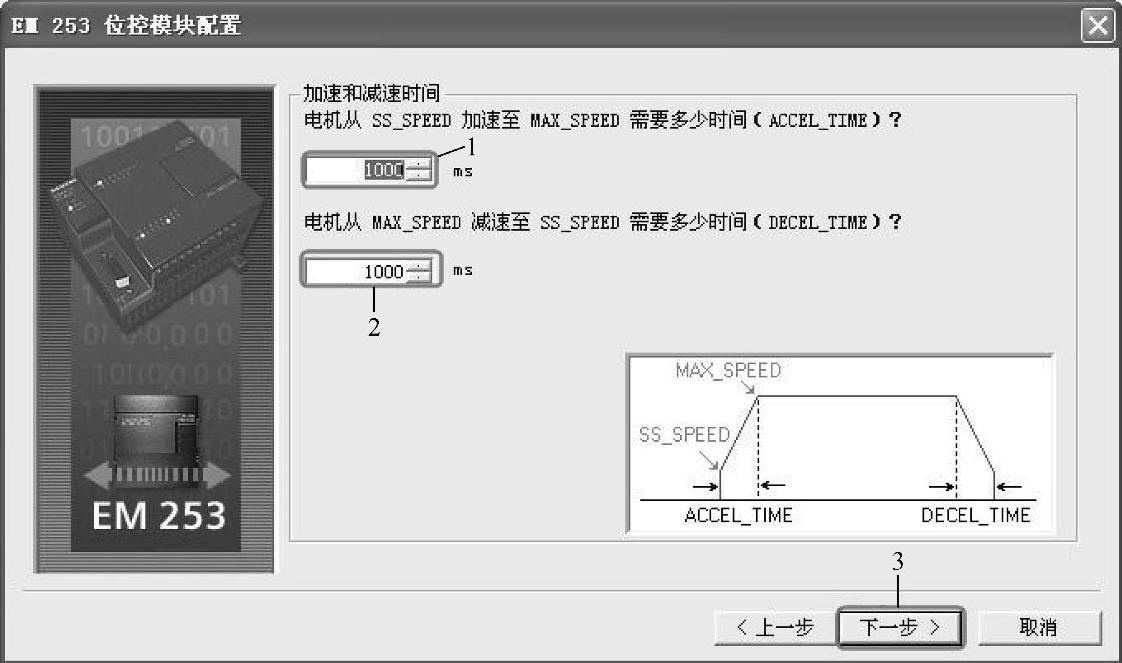
图3-23 加减速参数设定
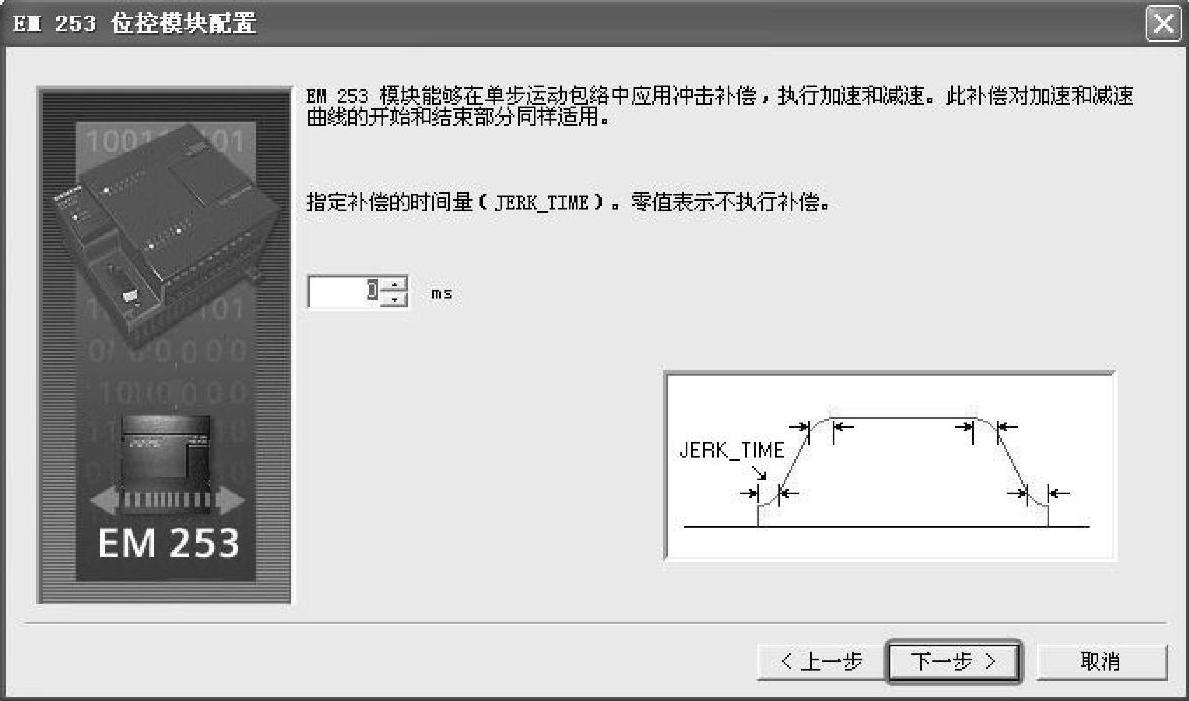
图3-24 设置运动位置拐点参数
先选取标记“1”处的选项,再单击“下一步”按钮,如图3-25、图3-26和图3-27所示。
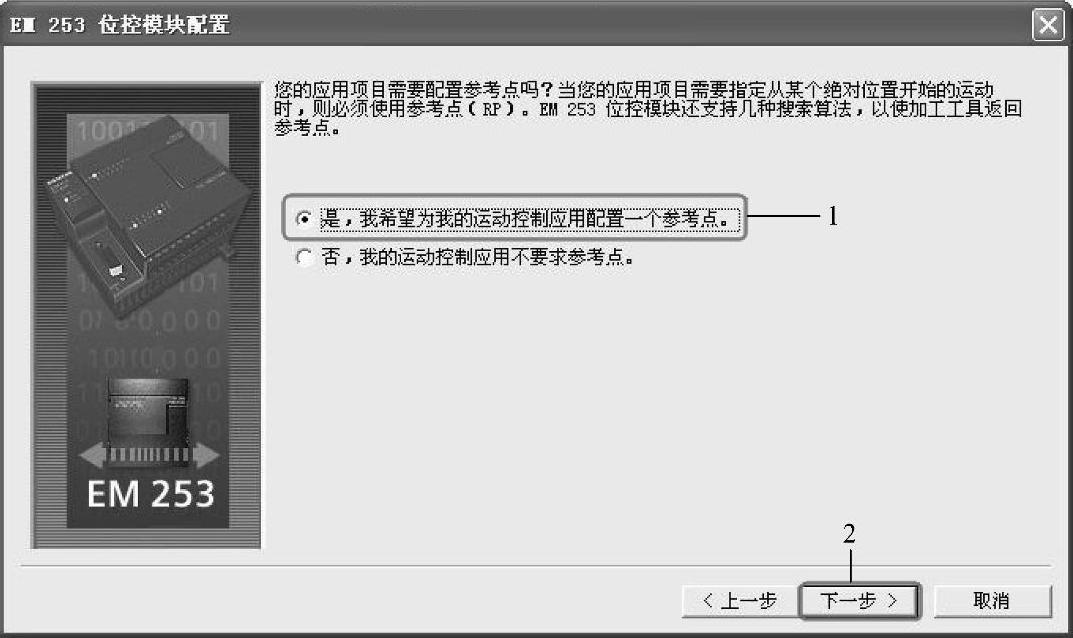
图3-25 设置模块寻找原点位置参数(1)

图3-26 设置模块寻找原点位置参数(2)
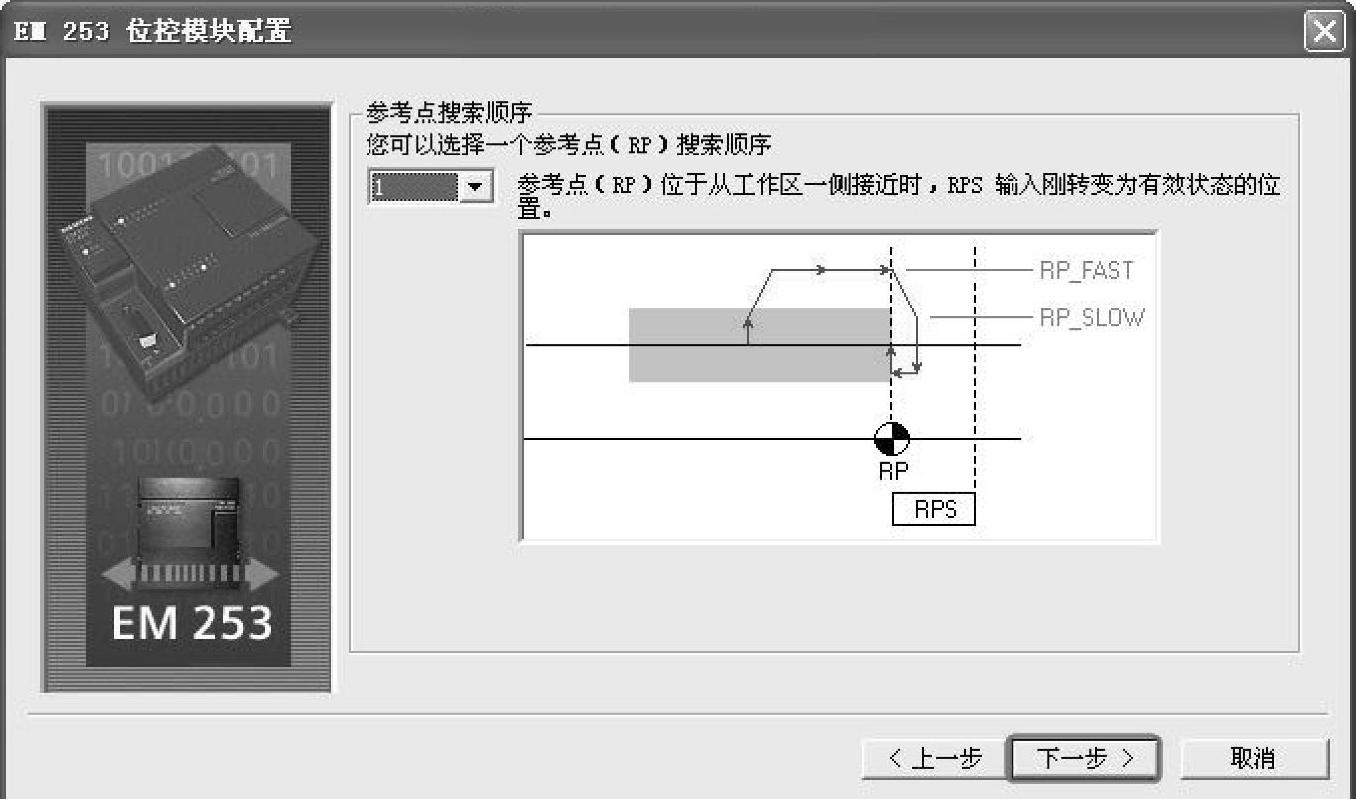
图3-27 设置模块寻找原点位置参数(3)
(11)设定定位模块EM253的运动轨迹包络
定位模块EM253的运动轨迹包络设定如图3-28所示。
(12)分配地址
先单击“建议地址”按钮,再单击“下一步”按钮,如图3-29所示。
(13)完成组态
单击“完成”按钮,结束组态,如图3-30所示。
4.编写程序
(1)子程序简介
完成以上的配置后,STEP7-Micro/WIN V4.0自动生成一系列子程序,以下重点介绍两个,即POSx_CTRL和POSx_GOTO。
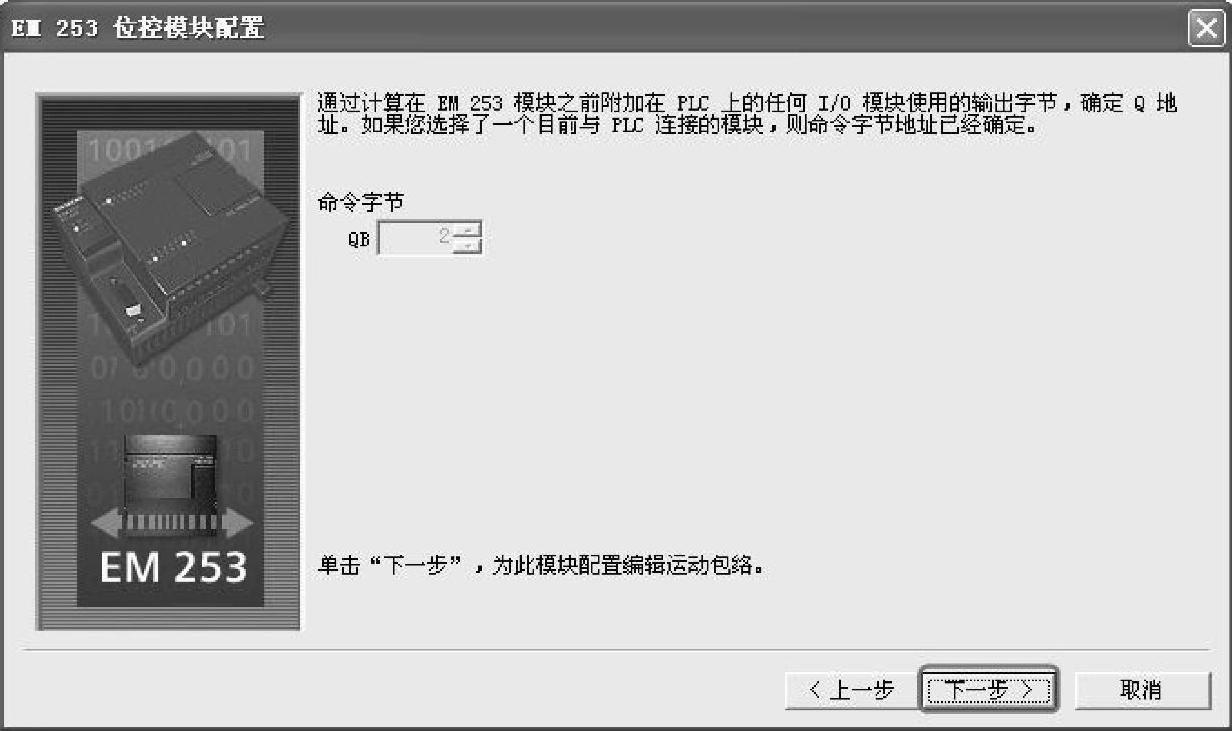
图3-28 设定定位模块EM253的运动轨迹包络
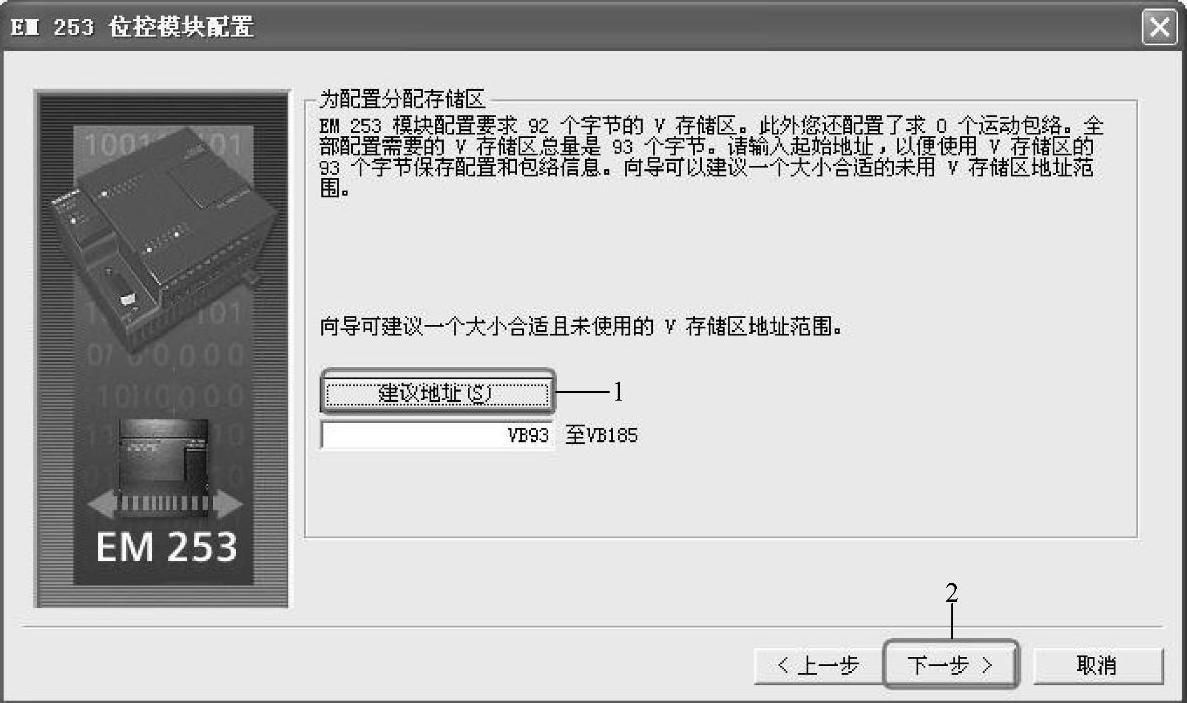
图3-29 分配地址
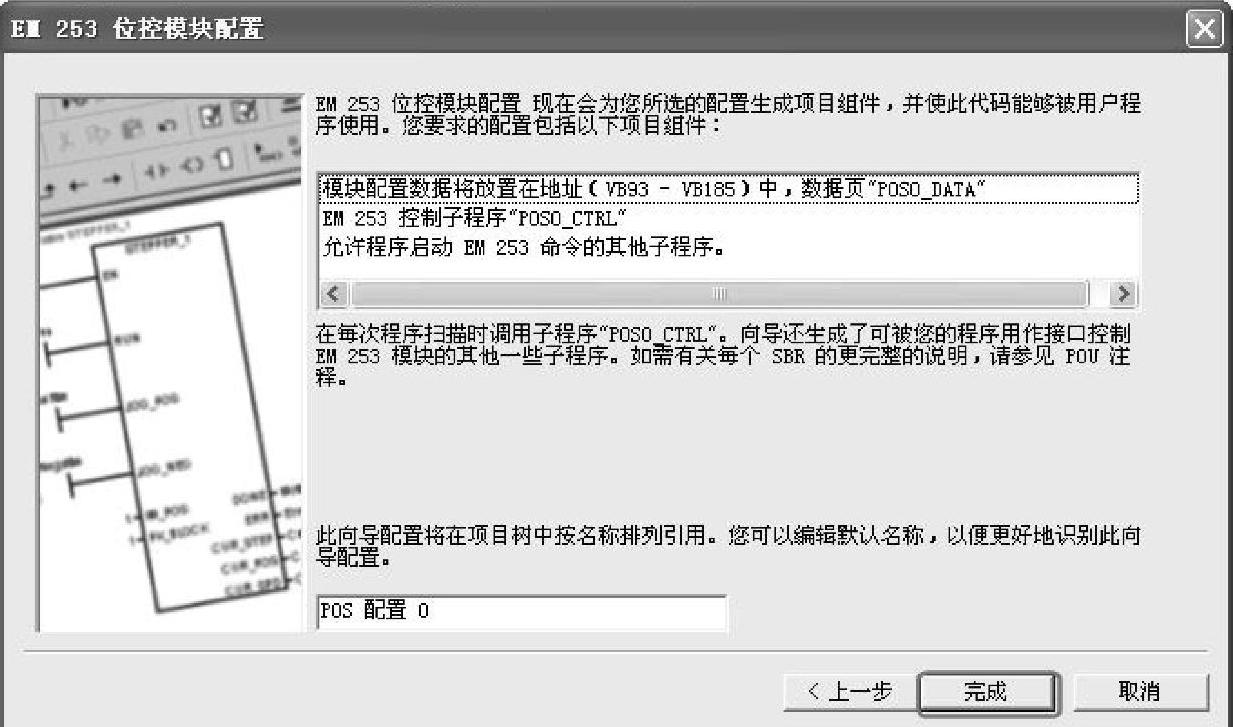
图3-30 完成组态
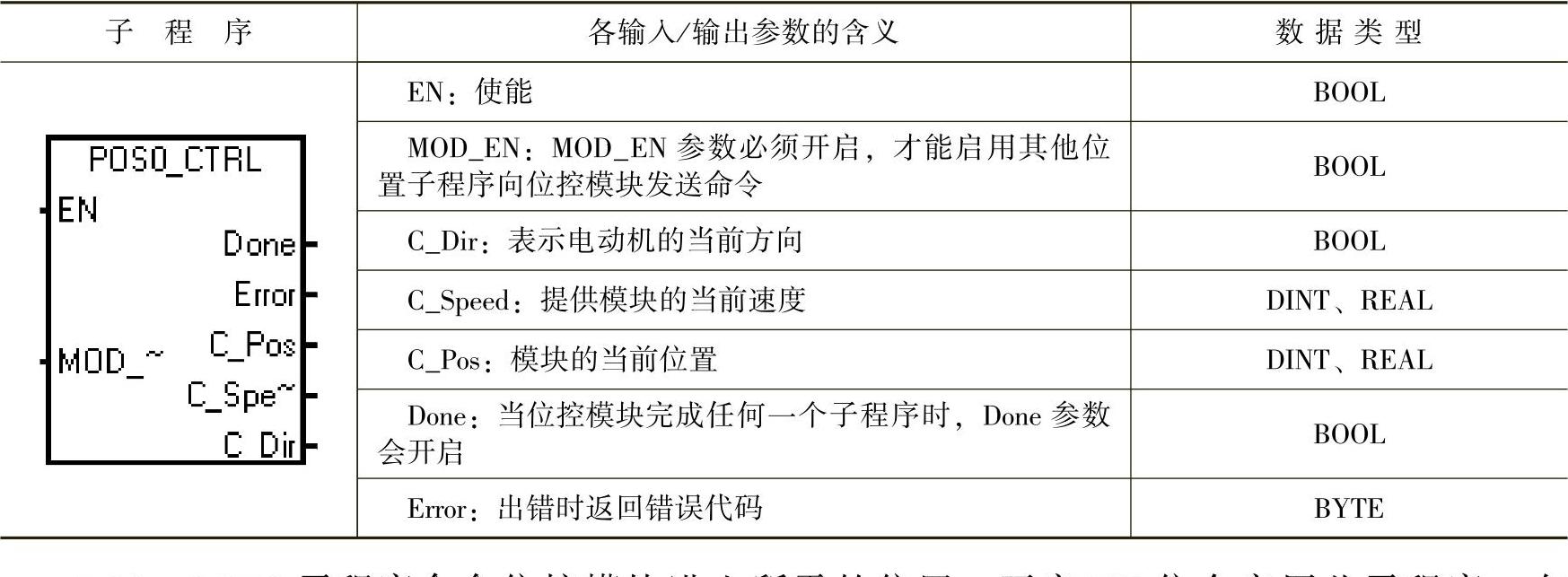
POSx_CTRL子程序(控制)启用和初始化位控模块,方法是自动命令位控模块每次S7-200更改为RUN模式时,载入配置/轮廓表。在项目中仅限使用一次本子程序,并确保程序在每次扫描时呼叫本子程序。要将SM0.0(始终开启)用作EN参数的输入。MOD_EN参数必须开启,才能启用其他位置子程序向位控模块发送命令。如果MOD_EN参数关闭,位控模块会异常中止所有正在执行的命令。POSx_CTRL子程序的输出参数提供位控模块的当前状态。当位控模块完成任何一个子程序时,Done参数会开启。Error参数包含本子程序的结果。该子程序各输入/输出参数含义见表3-10。
表3-10 POSx_CTRL子程序的参数表
POSx_GOTO子程序命令位控模块进入所需的位置,开启EN位会启用此子程序。在“完成”位发出子程序执行已经完成的信号前,应确定EN位保持开启。开启START参数向位控模块发出一个GOTO命令。对于在START参数开启,且位控模块当前不繁忙时执行的每次扫描,该子程序向位控模块发送一个GOTO命令。为了确保仅发送了一个GOTO命令,应使用边缘探测元素用脉冲方式开启START参数。Pos参数包含一个数值,指示移动的位置(绝对移动)或移动的距离(相对移动)。根据所选的测量单位,该数值是脉冲(DINT)或工程单位(REAL)数目。Speed参数确定该移动的最高速度。其各输入/输出参数见表3-11。
表3-11 POSx_GOTO子程序的参数表

(2)程序编写
编写如图3-31所示的程序,将其下载到PLC,并运行程序,当合上SB1时,步进电动机运行,当合上SB2或者SB3时,步进电动机停止,当碰到硬限位开关SQ1或者SQ2时,步进电动机也停止运行。

图3-31 程序
【关键点】首先硬件系统的接线要正确,再者要注意组态正确。EM253用于开环控制,含义是EM253不能接受反馈信号(如光电编码器的信号),并非指整个控制系统就是开环,若EM253与伺服系统连接时,伺服驱动器与伺服电动机构成自闭环系统,也可以说这个控制系统是闭环的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。