



自校正控制系统是自适应控制系统中一个相当活跃的分支,它基本上从两个方面发展。一个是基于随机控制理论和最优控制理论的发展,最早是由卡尔曼(Kalman,1958)提出的,后来Peterka(1970)把自校正思想引入随机系统,Astrom和Wittenmark(1973)针对参数未知的定常系统正式提出“自校正调节器”(Self-Tuning Regulator,STR),把系统的在线辨识技术和最小方差控制相结合,构成了自校正的基本思想。Clark和Gawthrop(1975,1979)推广了Astrom的思想,在一般最优指标下给出适应控制——“自校正控制器”(Self-Tuning Controller,STC)。自校正控制系统另一方面发展是基于极点或极、零点配置理论的自校正控制。
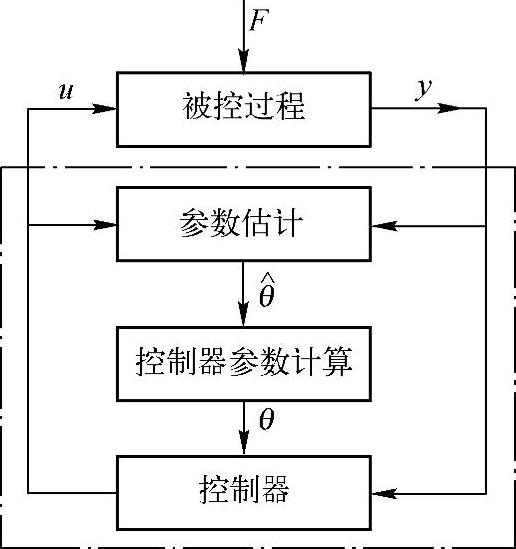
图2-26 自校正调节器框图
自校正调节器是典型的辨识与控制的结合体,其框图如图2-26所示。
辨识部分采用最小二乘法,依据过程的输入输出数据,得到数学模型的各个参数
 (https://www.xing528.com)
(https://www.xing528.com)
式中,y为输出变量;u为控制变量;d为以采样周期表示的时滞数值。
控制部分采用最小方差控制。目标是求u使J=E[y2(k+1)]达到最小。首先是按参数已知情况下求控制律,然后用参数的估计值代替未知参数,如果参数估计是随着系统的变化而实时进行的,那么系统就是自校正的。
实践上,自校正调节器在国内外不少场合取得了成功,并且也出现了工业产品,例如ABB公司的Novatune自校正调节器。
自校正调节器还有一些问题,如:过程趋向平稳后,辨识与控制的矛盾会出现,并趋向尖锐。此时控制器对系统不再有充分的激励,辨识算法的进行遇到困难。对此Astrom认为应该在系统开始投入运行时辨识,到接近平稳时则宜暂停,隔一段时间再进行辨识。另外由算法得到的控制作用u(k)会大起大落,因为在目标函数中未考虑u(k)的平稳程度。由Clarke提出的自校正控制器,在目标函数中考虑了u(k),与线性二次型最优控制的做法相似,这样即可克服上述缺点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。