



【摘要】:图2-21 观测补偿器控制方案观测补偿器控制方案如图2-21所示,由图可得闭环特征方程可由式求得不管对象的时滞有多大,只要Gk的模足够小,就有从而闭环特征方程成为1+GcGm=0 系统的稳定性只与观测器Gm有关,而与时滞大小无关。如Gm=Gp,则式与史密斯预估补偿控制的式相同,表明其控制效果与史密斯预估补偿控制的相同。观测补偿器控制方案仅适用于随动控制系统,不适用于定值控制系统。
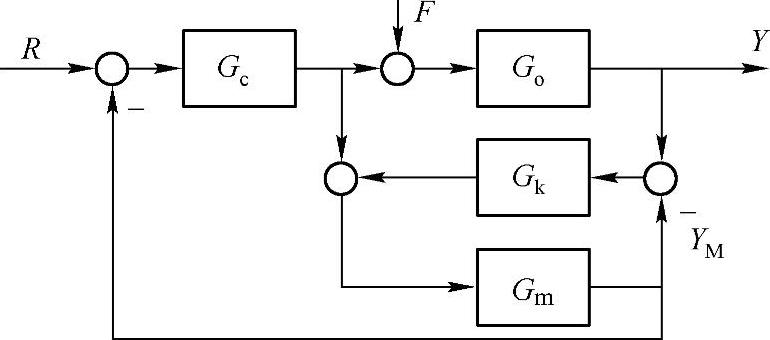
图2-21 观测补偿器控制方案
观测补偿器控制方案如图2-21所示,由图可得
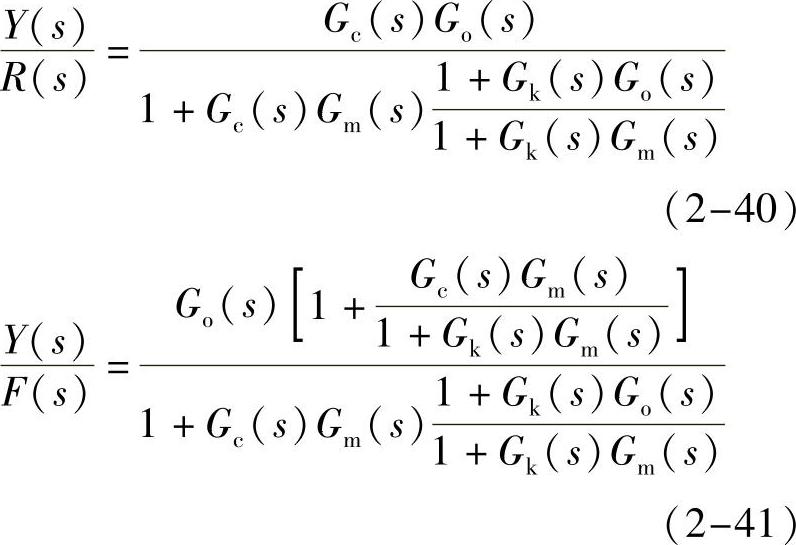
闭环特征方程可由式(2-42)求得

不管对象的时滞有多大,只要Gk(s)的模足够小,就有(https://www.xing528.com)

从而闭环特征方程成为
1+Gc(s)Gm(s)=0 (2-44)
系统的稳定性只与观测器Gm(s)有关,而与时滞大小无关。如Gm(s)=Gp(s),则式(2-40)与史密斯预估补偿控制的式(2-36)相同,表明其控制效果与史密斯预估补偿控制的相同。但本方案对于对象参数的变化不敏感,且不需要时滞环节。因此,实施起来方便,适应性强。
从图中可以看出,由主控制器Gc(s)与Go(s)、Gm(s)、Gk(s)组成的主随动控制系统,用于使观测器输出值跟踪设定值。由副控制器Gk(s)与Gm(s)组成副随动控制系统,用于使观测器输出值与系统的输出保持同步。当设定值R变化时,由于观测器输出YM尚未变化,所以主控制器输出一个较强的控制信号,通过前馈作用,使观测器输出较快地跟踪,以减少控制器的偏差,起到超前的控制作用。同时,该控制信号对过程本身也起调节作用,使输出较快变化。由于副控制器的控制作用,使观测器输出YM适应系统输出Y的变化。当主、副控制器均为比例积分作用时,整个系统可以达到稳态无余差。
观测补偿器控制方案仅适用于随动控制系统,不适用于定值控制系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。