



【摘要】:同样,由图2-18可以得到定值控制系统的闭环传递函数图2-17 史密斯预估补偿控制的框图图2-18 定值控制系统的闭环传递函数因此,经过预估补偿后,闭环特征方程中已消去了e-τs项,也就是消除了时滞对控制品质不利的影响。史密斯预估补偿器对大时滞过程尽管能提供很好的控制质量,但遗憾的是,其控制质量对模型误差十分敏感,特别是时滞时间和增益误差。
史密斯预估补偿控制的框图如图2-17所示,图中Gk(s)是史密斯引入的预估补偿器的传递函数。为使图2-17所示系统的闭环特征方程中不含有时滞τ,因此期望的闭环传递函数
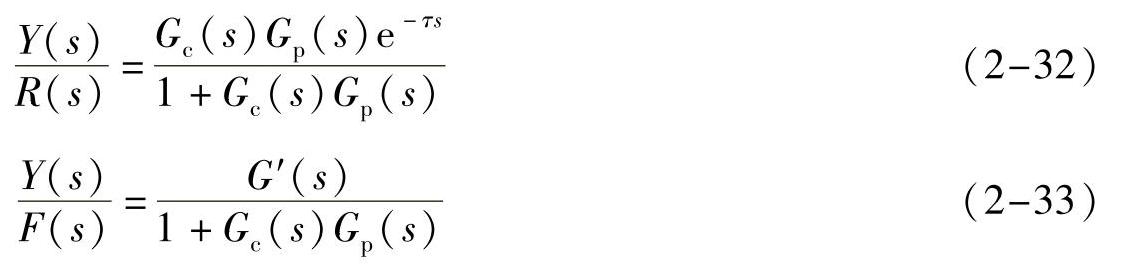
引入预估补偿器后,实际的闭环传递函数是

根据要求
1+Gc(s)Gk(s)+Gc(s)Gp(s)e-τs=1+Gc(s)Gp(s)
所以 Gk(s)=Gp(s)(1-e-rs) (2-35)
这样构成的预估补偿控制方案如图2-17所示,其闭环传递函数为
 (https://www.xing528.com)
(https://www.xing528.com)
其中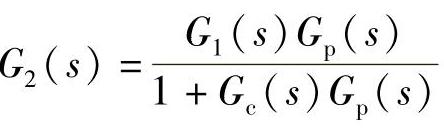 ,类似于没有时滞环节时的随动控制系统的闭环函数。同样,由图2-18可以得到定值控制系统的闭环传递函数
,类似于没有时滞环节时的随动控制系统的闭环函数。同样,由图2-18可以得到定值控制系统的闭环传递函数

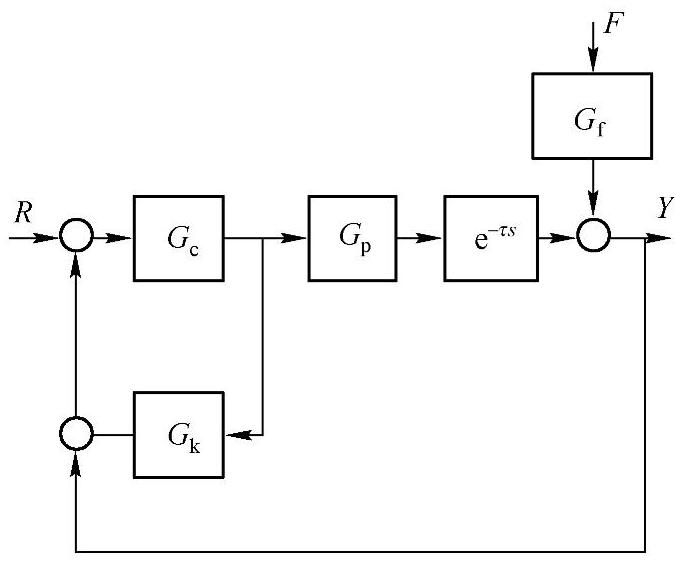
图2-17 史密斯预估补偿控制的框图
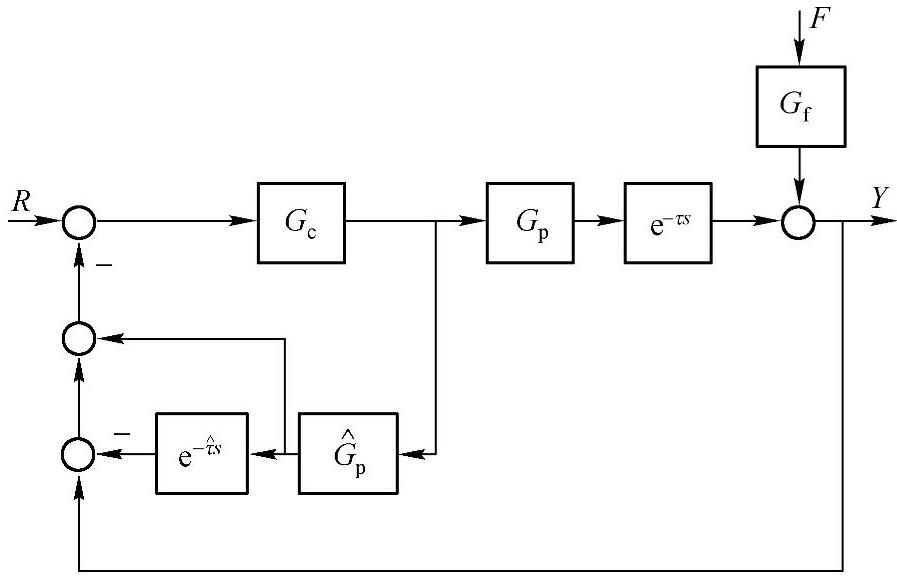
图2-18 定值控制系统的闭环传递函数
因此,经过预估补偿后,闭环特征方程中已消去了e-τs项,也就是消除了时滞对控制品质不利的影响。对于随动控制系统,控制过程仅在时间上推迟时间τ。这样,系统的过渡过程形状与品质和无时滞的完全相同。对于定值控制系统,控制作用要比扰动滞后一个τ时间,所以控制效果不如随动控制系统那样明显。
随着电子计算机应用,特别是集散控制系统中实施更为方便,史密斯预估补偿器的应用近年日益普遍。这种补偿器不仅可用于单输入单输出系统,也可用于多输人多输出系统。史密斯预估补偿器对大时滞过程尽管能提供很好的控制质量,但遗憾的是,其控制质量对模型误差十分敏感,特别是时滞时间和增益误差。所以对非线性严重或时变增益的过程,这种线性史密斯预估器是不太适用的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。