



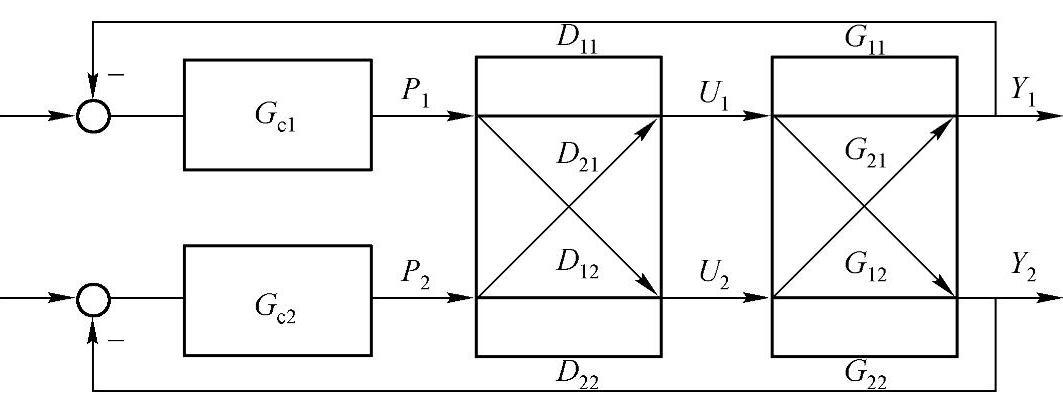
图2-13 双输入双输出串接解耦控制系统框图
图2-13所示为双输入双输出串接解耦控制系统框图。由图可得
Y(s)=G(s)U(s)
U(s)=D(s)P(s)
所以 Y(s)=G(s)D(s)P(s) (2-24)
由式(2-24)可知,只要能使G(s)D(s)相乘后成为对角阵,这样就解除了系统间耦合,两个控制回路不再关联。要求G(s)D(s)之积为对角阵,对其非零元素又有三类方法:
1.对角线矩阵法
此法要求G(s)D(s)=diag[Gij(s)],如

即通过解耦,使各个系统的特性完全像原来的单回路控制系统一样。
因此,解耦装置D(s)可以由式(2-25)求得
这样求得的解耦装置元素的传递函数可能相当复杂。
2.单位矩阵法
单位矩阵法为
G(s)D(s)=I=diag[1,1Λ1]
如  (https://www.xing528.com)
(https://www.xing528.com)
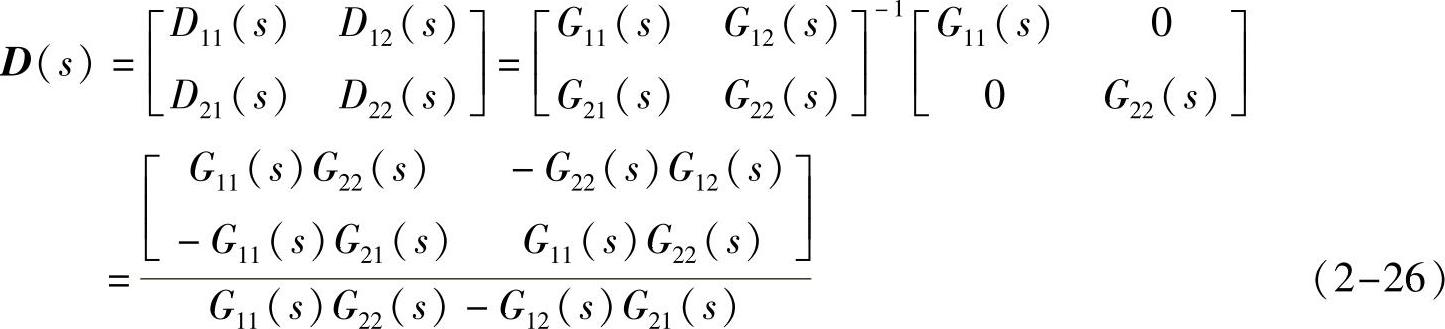
此时解耦装置D(s)为


这种方法解耦使各个系统的对象特性成为1∶1的比例环节,所以具有稳定性好、克服外扰能力强的优点。但是要实现它的解耦装置比其他方法求得的解耦装置更为困难。
3.前馈补偿法
前馈补偿法只规定对角线以外的元素为零,这样也完全解除了系统间的耦合。但各通道的传递函数并不是原来的Gij(s)。此时可取某些Gij(s)=1,这样做显然比较简单,所以也有人称之为简易解耦。

图2-14 前馈解耦控制系统框图
对于双输入双输出系统的前馈解耦控制系统框图如图2-14所示。在此取D11(s)=D21(s)=1,解耦补偿装置D21(s)和D12(s)可以根据前馈补偿原理求得
G12(s)+D21(s)G22(s)=0
所以 
又有 G12(s)+D12(s)G11(s)=0

也可令D21(s)=D12(s)=1或D21(s)=D22(s)或D12(s)=D11(s)=1。
按同样原理可以求得解耦补偿装置的传递函数,在很多情况下,采用静态解耦已能获得相当好的效果。
一般来说,需要采用动态解耦时,Dij(s)宜采用超前滞后环节即 的形式。
的形式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。