



【摘要】:总控制信号u是前馈控制信号ud和反馈控制信号uc之和。如正常工况下,前馈控制信号ud=12mA,则反馈控制信号uc只能在4~12mA变化,使反馈控制信号被压缩,同时,使总控制信号输出不能在全范围内变化。在有些情况下,前馈控制的偏置值不需要引入。
1.偏置值的设置
前馈反馈控制系统中引入偏置值十分必要。总控制信号u是前馈控制信号ud和反馈控制信号uc之和。如正常工况下,前馈控制信号ud=12mA,则反馈控制信号uc只能在4~12mA变化,使反馈控制信号被压缩,同时,使总控制信号输出不能在全范围内(4~20mA)变化。为此,需引入偏差信号ub,其值正好抵消正常工况下前馈控制信号输出ud,即
u=uc+ud-ub (2-21)
集散控制系统中,前馈控制值常在前馈PID控制功能模块中直接给出,偏差值也可直接输入。在有些情况下,前馈控制的偏置值不需要引入。例如,在锅炉三冲量控制系统中,由于正常工况下给水量和蒸汽量应满足物料平衡关系,因此,不需要引入偏置值;当有流量副回路时,也不需要偏置值。
2.前馈补偿装置的参数选择
在许多工业过程控制中,静态前馈控制已可以获得满意的控制效果。所以静态增益Kd的选择十分重要。Kd的选择可以通过物料平衡或热量平衡的计算获得,也可以依据操作参数计算。如果扰动量为f1时,输出为u1,可使被控变量保持在设定值。而在扰动为f2时,输出应为u2,才能使被控变量维持在设定值,则Kd应为: (https://www.xing528.com)
(https://www.xing528.com)
还可以凭经验选择,uj由小到大观测过渡过程曲线变化,最后确定较好的Kd值,如图2-11所示。
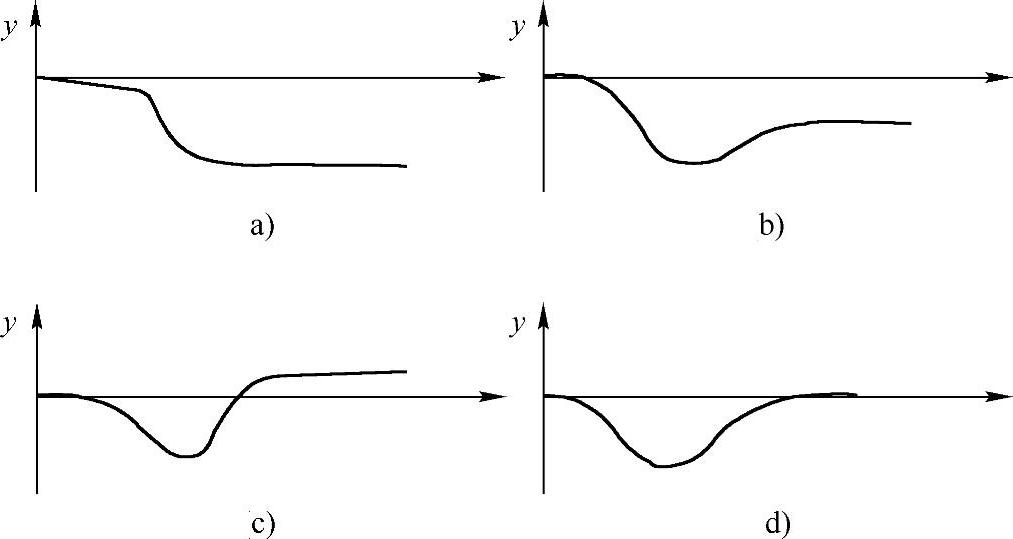
图2-11 不同Kd的过渡过程曲线
a)kd=0 b)kd太小 c)kd太大 d)kd正好
关于T1和T2的选择,一般最好进行测试得到,或按经验进行,观测过渡过程曲线的变化,进行选择和判断。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。