



【摘要】:前馈补偿装置的复杂程度主要取决于控制通道和扰动通道的传递函数。在工业控制实际应用中,控制通道和扰动通道的传递函数可以用具有时滞一阶环节来近似,其传递函数分别为这样得到的前馈补偿装置的传递函数为若τ0=τf时,则可得式中,Kd是静态增益;T1和T2分别是超前和滞后环节的时间常数。在用计算机控制时,前馈补偿装置与其他控制算法一样是用软件来实现的。首先将前馈补偿装置的传递函数转化成如图2-10所示等效框图。
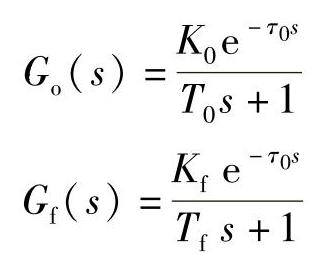
前馈补偿装置的复杂程度主要取决于控制通道和扰动通道的传递函数。在工业控制实际应用中,控制通道和扰动通道的传递函数可以用具有时滞一阶环节来近似,其传递函数分别为
这样得到的前馈补偿装置的传递函数为

若τ0=τf时,则可得

式中,Kd是静态增益;T1和T2分别是超前和滞后环节的时间常数。T1>T2时,补偿环节具有超前特性,T1<T2时,补偿环节具有滞后特性,T1=T2时,动态环节的分子分母项抵消,只进行静态补偿。
在用计算机控制时,前馈补偿装置与其他控制算法一样是用软件来实现的。实际上又可分为两类:一类采用组态形式,把 作为一种组态;另一类是直接按ud与f的关系计算。首先将前馈补偿装置的传递函数
作为一种组态;另一类是直接按ud与f的关系计算。首先将前馈补偿装置的传递函数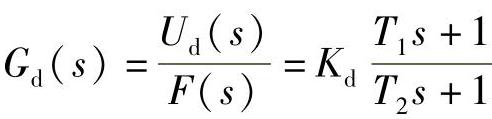 转化成如图2-10所示等效框图。
转化成如图2-10所示等效框图。
由图2-10可知,先计算f→b
即
T2sB(s)+B(s)=F(s)
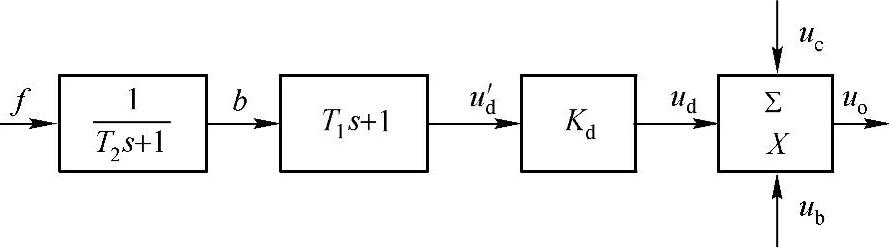
图2-10 等效框图
写成差分方程形式

所以

上式可写成
 (https://www.xing528.com)
(https://www.xing528.com)
令 =A或B(k)=ATs+B(k-1)
=A或B(k)=ATs+B(k-1)
即 
再计算
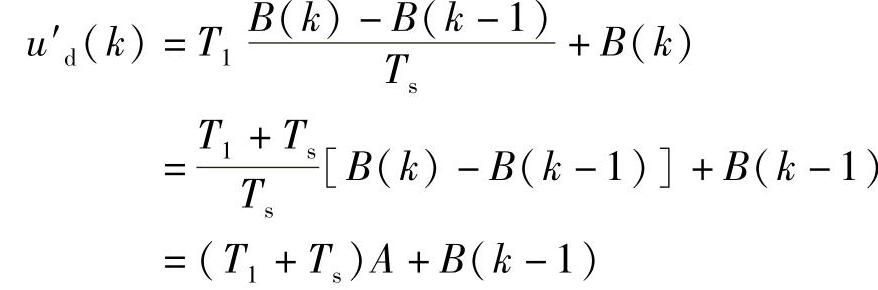
因此超前滞后环节的算法为
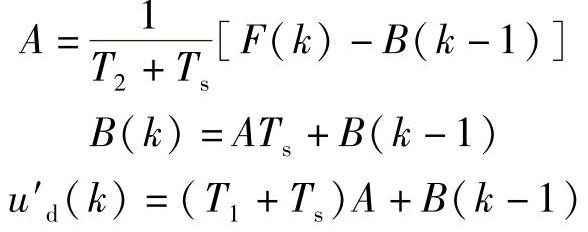
式中 A——中间变量;
F(k)——模块输入,前馈变量的现时值;
u′d(k)——超前滞后环节的输出;
B(k)——F通过滞后环节的现时输出值;
B(k-1)——F通过滞后环节的上一次输出值;
T1——超前时间;
T2——滞后时间;
Ts——采样周期。
这类补偿环节的输出有两类:
1)比值算法(用于相乘方案):u=[Kdu′d/ub]uc
2)位置算法(用于相加方案):u=[Kdu′d-ub]+uc
式中 ub——偏置;
uc——反馈输入。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。