



1.矢量控制的基本思想
张老师说:“直流电动机的调速性能是十分优越的,所以,人们就致力于分析直流电动机调速性能优越的原因,进而研究如何使异步电动机的变频调速也能够具有和直流电动机类似的特点,从而改善其调速性能,这就是矢量控制的基本指导思想。
(1)直流电动机的特点
1)磁路特点 直流电动机有两种磁通:
主磁通:由定子的主磁极产生,用Φ0表示。主磁极上有励磁绕组,绕组中通有励磁电流I0。
电枢磁通:由转子绕组中的电枢电流IA产生,用ΦA表示。
主磁通和电枢磁通在空间是互相垂直的,如图7-39a所示。
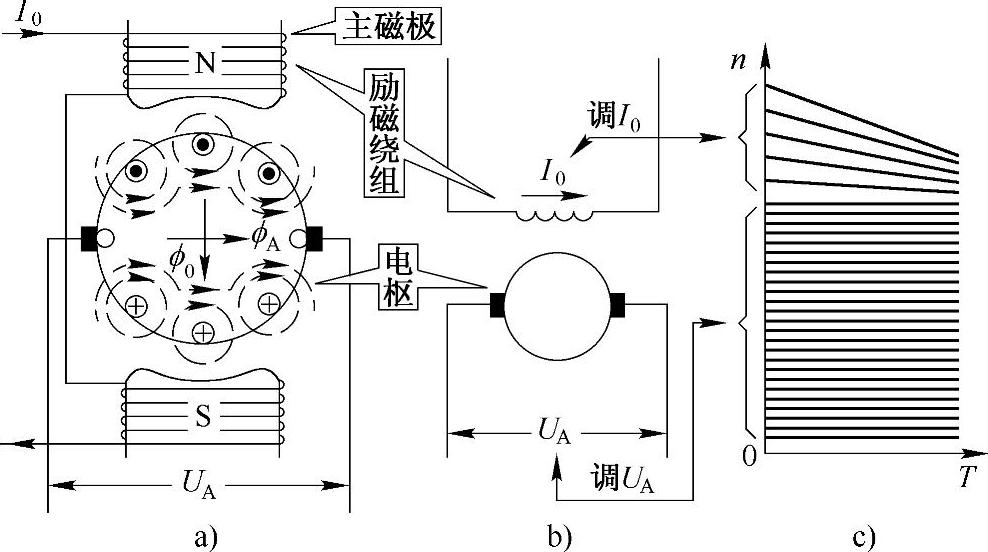
图7-39 直流电动机的特点
a)磁场特点 b)电路特点 c)调速后的机械特性簇
2)电路特点 励磁电路和电枢电路是互相独立的,如图7-39b所示。
3)调速特点 在这两个互相垂直而独立的磁场中,只需调节其中之一即可进行调速,两者互不干扰,调速后的机械特性如图7-39c所示。
(2)矢量控制的基本考虑 迄今为止,我们提到过的旋转磁场有两种:三相旋转磁场和二相旋转磁场。除此以外,如果用一台原动机带动直流磁场旋转起来,又可以得到直流旋转磁场。以磁通的大小相同,转速相等为前提,三种旋转磁场之间是可以互相转换的。
1)矢量控制框图 仿照直流电动机的特点,当变频器得到给定信号后,首先由控制电路把给定信号分解为两个互相垂直直流旋转磁场的信号:励磁分量ΦM和转矩分量ΦT,与之对应的控制信号分别为iM*和iT*。
接着,通过‘直-交变换’把直流旋转磁场的信号等效地转换成同样是互相垂直的二相旋转磁场的信号iα*和iβ*。又通过‘2/3变换’把二相旋转磁场的信号等效转换成三相旋转磁场的信号iA*、iB*和iC*。用来控制逆变桥中各开关器件的工作,如图7-40所示。

图7-40 矢量控制框图
在运行过程中,当因负载发生波动导致转速变化时,可通过转速反馈环节反馈到控制电路,以调整控制信号。调整时,令磁场信号iM*不变,而只调整转矩信号iT*,从而使异步电动机得到和直流电动机十分相似的机械特性。
2)矢量控制特点 矢量控制只调整定子电流的转矩分量。从而能够保持主磁通不变。
2.应用矢量控制方式的基本要领
实施矢量控制的关键,是进行磁场之间的等效变换,而进行等效变换的前提,是必须了解电动机的所有电磁参数。
因此,在应用矢量控制方式时,应首先把电动机的有关参数输入给变频器。主要有:
(1)铭牌数据 包括:额定容量、额定电压、额定电流、额定频率、额定转速、磁极数等。对这些参数,用户只需根据电动机的铭牌输入给变频器即可,如图7-41a所示。

图7-41 矢量控制所需参数
a)铭牌数据 b)等效电路参数
(2)定、转子绕组的参数 如定子每相绕组的电阻和漏磁电抗、转子每相等效绕组的电阻和漏磁电抗、空载电流等,如图7-41b所示。”(https://www.xing528.com)
小李问:“这定、转子绕组的参数怎么能知道呢?铭牌上没有,说明书上也不提供呀。”
张老师说:“我们在2.7节不是曾经讨论过关于电动机参数的测量吗?
近代的变频器都根据相关原理,配置了‘自测定功能’,能够自动地测定电动机绕组的有关参数。具体方法大致如下:
3.电动机参数的自测定
(1)准备工作
1)输入电动机的额定数据;
2)使变频器处于“键盘操作”方式;
3)将自测定功能预置为自动方式。
(2)静止自测量 用手制住电动机的输出轴,使电动机处于堵转状态,如图7-42a所示。变频器输出额定电压的25%,按下RUN键,持续约1min。实际上相当于做堵转试验。

图7-42 电动机参数的自测量
a)静止自测量 b)旋转自测量
(3)旋转自测量 将电动机和负载脱开,处于空转状态,如图7-42b所示。按下RUN键,让电动机空转约1min,转速约为额定转速的(50~80)%。实际上就是空载试验。
如电动机不能脱离负载,则空载电流按额定电流的40%计(I0≈40%IMN)。
4.矢量控制的反馈
现代变频器的矢量控制,按照是否需要外部的转速反馈环节,分为有反馈矢量控制和无反馈矢量控制两种控制方式。
(1)有反馈矢量控制 转速反馈信号大多由旋转编码器测得,变频器常用的旋转编码器为二相原点输出型。
输出信号分为A相和B相,两者在相位上互差90°±45°,如图7-43b所示,A和B分别是A相和B相的‘非’。每旋转一转,编码器输出的脉冲数可根据情况选择。Z相为原点标记,其特点是:每转一转,只输出1个相位固定的脉冲,作为原点的标志。
(2)无反馈矢量控制 无反馈矢量控制方式的主要优点是使用方便,用户不需要增加任何附加器件,如图7-44a所示。且机械特性较硬,能够满足大多数生产机械的需要,如图7-44b所示。主要缺点是调速范围和动态响应能力都略逊于有反馈矢量控制方式。
事实上,大多数恒转矩负载都可以选择无反馈矢量控制方式。它非但机械特性优于V/F控制方式,且不会发生电动机磁路饱和等问题,调试方便。

图7-43 编码器的信号与接线
a)编码器的引出线 b)编码器的输出信号

图7-44 无反馈矢量控制的机械特性
a)基本接线 b)机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。