



1.调压调速的性质
小李打开笔记本,开始说道:“以前曾经说过,当改变定子电压时,临界转差不变,临界转矩和电压的二次方成正比,电压越低,临界转矩越小,如图6-10a中之曲线①、曲线②和曲线③所示。
以恒转矩负载为例,电压下降后,转速略有下降,如图a中之A、B、C点所示。
由图可以看出,电压下降后,转差和转差率将增大。所以,改变电压的调速实质上属于改变转差率的调速。
但对于恒转矩负载来说,调速的范围很小,并无实用价值。如果像风机那样的二次方律负载,将工作点移至KS段,则在降压后的运行点分别是D、E、F点,降压后的转速分别是nMD、nME和nMF,由图6-10b可知,转速范围是较大的。
这里,我有几个问题没有想明白。
第一个问题,KS段不是非稳定区吗?为什么二次方律负载可以运行呢?”
张老师说:“这里,我们有必要补充一下关于稳定运行的讨论。”
2.KS段稳定运行的讨论
(1)恒转矩负载 在图6-11a中,曲线①是电动机在降压后的机械特性,曲线②是负载的机械特性,负载转矩是TL。假设拖动系统在Q点运行,转速为nQ,我们来看看它是否稳定?
如果由于某种原因,转速上升为nX1,由曲线①知,电动机的电磁转矩将增大为TMX1,大于负载转矩,拖动系统的转速非但不下降,反而更加上升,直至进入到AKX段中的Q′点为止。可见,它在KS段是不能稳定运行的。
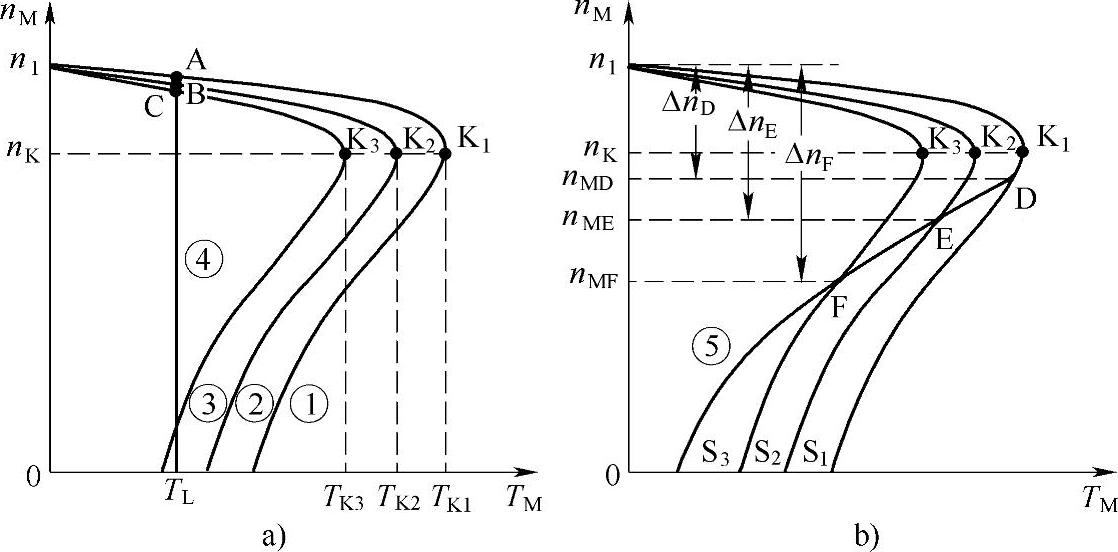
图6-10 调压调速原理
a)恒转矩负载时 b)二次方律负载时
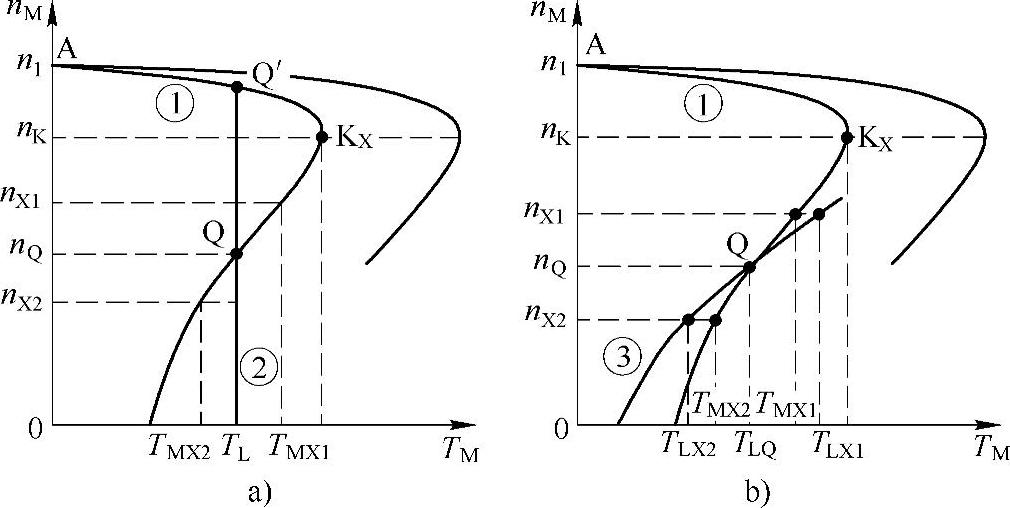
图6-11 KS段的稳定运行
a)恒转矩负载 b)二次方律负载
(2)二次方律负载 如图6-11b所示,曲线③是二次方律负载的机械特性。也假设拖动系统正在Q点运行,这时的负载转矩是TLQ,转速是nQ。
当由于某种原因,转速上升为nX1。由曲线①知,电动机的电磁转矩增加为TMX1,但由曲线③知,负载转矩增加为TLX1,比电磁转矩增加得更多:
TLX1>TMX1(https://www.xing528.com)
于是,拖动系统将减速,工作点回到Q点。
反之,如由于某种原因,转速下降为nX2。由曲线①知,电动机的电磁转矩将减小为TMX2,但由曲线③知,负载转矩减小为TLX2,比电磁转矩减小得更多:
TLX2<TMX2
于是,拖动系统将增速,工作点又回到Q点。
所以,二次方律负载在KS段是能够稳定运行的。下面,你说一下调速的过程吧。”
3.调速过程
小李说:“如图6-12a所示,假设电动机的机械特性如曲线①所示,当负载转矩为TL1时,拖动系统的转速是nM1,工作点为Q1点。
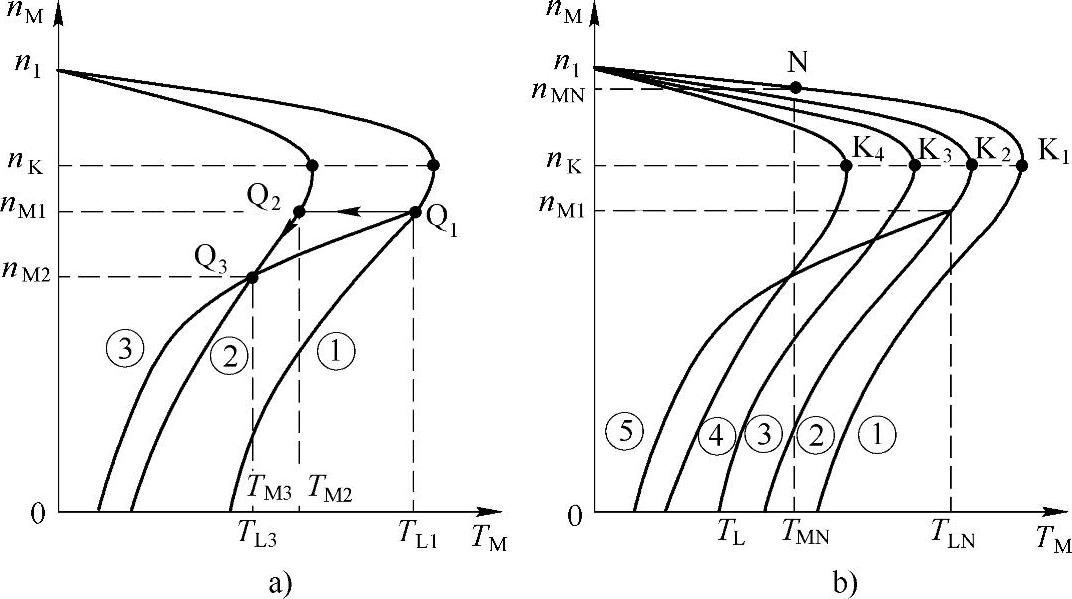
图6-12 调压调速的实际应用
a)调速过程 b)应用特点
今降低电压,电动机的机械特性如曲线②所示,在刚降压的瞬间,电动机的转速因为惯性而未变,系统的工作点跳转至Q2点,电动机的电磁转矩减小为TM2,小于TL1,电动机于是减速。随着转速的下降,电动机的电磁转矩沿着曲线②下降,与此同时,从曲线③可知,负载转矩也随转速的下降而下降,而且降得更多,到Q3点时,电动机的电磁转矩和负载的阻转矩重又平衡(相等)。这时,转速已经下降为nM2了。
4.应用特点
这里又有一个问题,如图6-11b所示,拖动系统的转速岂不是不能到临界转速以上运行了?此外,负载转矩快要接近于临界转矩了,电动机岂不是没有了过载能力?”
“问得很好。”张老师高兴地说:如果要采用调压调速的方案,在为负载选择电动机时,就必须注意两点:
(1)电动机的额定转速应该比负载的额定转速大一挡。例如,如果负载的额定转速是960r/min,电动机的额定转速应该选择1460r/min的。
(2)二次方律负载主要指风机和水泵,而风机和水泵是不大可能过载的,所以电动机的额定转矩应该比负载的额定转矩小一些,如图6-12所示。
“转差那么大,会不会过电流呀?”小李又问。
“因为电压降低后,磁通会随之减小,所以只要选择适当,是不会过电流的,但这时电动机的效率较低,损耗较大,所以电动机的温升可能要高一些。”
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。