



1.机械特性的临界点
(1)临界转矩
由式(3-31)
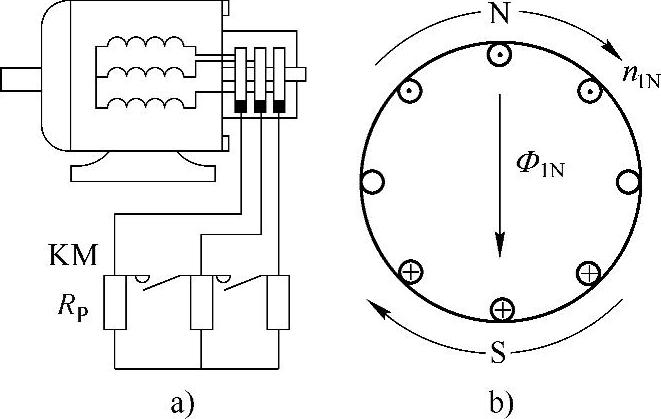
图4-31 绕线转子异步电动机的电路
a)基本电路 b)转子的等效电路
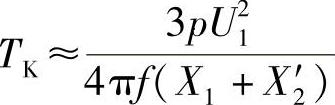
可知,临界转矩和转子回路的电阻无关。所以,转子串联电阻后,临界转矩TK的大小不变。
(2)临界转速
由式(3-30)
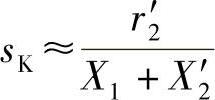
知,临界转差率与转子电阻成正比,所以,转子串联电阻后,临界转差率增大,临界转速nK下降。
结果是,转子串联电阻后,临界点将下移,机械特性如图4-32中之曲线②、③、④所示。
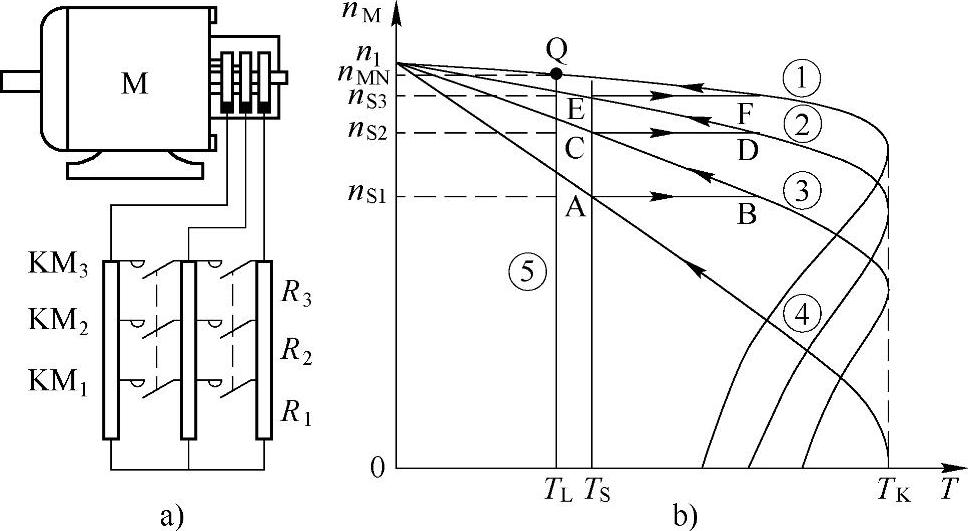
图4-32 转子串联电阻后的机械特性
a)电路图 b)机械特性及起动过程
2.转子串联电阻后的起动转矩(https://www.xing528.com)
由式(3-17)

可以看出,转子串联电阻后的起动转矩和转子回路的等效电阻密切相关,适当配置RP值,可以增大起动转矩。
3.起动过程
通常,在起动过程中,把电阻RP分成若干段,如图4-32a中之R1、R2、R3所示,再逐级地减小起动电阻。起动过程如下:
刚起动时,接触器KM1、KM2、KM3都处于失电状态,R1、R2、R3都接入电路,RP最大为
RP=R1+R2+R3
机械特性如图4-32b中之曲线④所示,起动转矩很大,如计算适当,可以等于临界转矩。电动机开始起动,随着转子转速的升高,转差减小,转子绕组的感应电动势和电流以及电磁转矩也减小,其工作点沿着曲线④上升,当到达A点时,电动机的转速上升到nS1,电磁转矩减小为TS,这时,令接触器KM1闭合,电阻R1被切除出电路。
RP=R2+R3
由于电阻的减小,转子电流和电磁转矩都增加,机械特性变成了曲线③,工作点从A点跳转到B点,转速继续升高,转差继续减小,转子电流和电磁转矩又减小,其工作点沿着曲线③上升,当到达C点时,转速已上升为nS2,电磁转矩则又减小为TS,这时,令接触器KM2闭合,电阻R2也被切除出电路。
RP=R3
这时,转子电流和电磁转矩又增加,机械特性变成了曲线②,工作点从C点跳转到D点,转速继续升高,转差、转子电流和电磁转矩又减小,其工作点沿着曲线②上升,当到达E点时,转速上升为nS3,电磁转矩再一次减小为TS,这时,令接触器KM3闭合,电阻R3也被切除出电路。
RP=0
转子电流和电磁转矩又增加,机械特性变成了自然机械特性曲线①,工作点从E点跳转到F点,转速继续升高,转差、转子电流和电磁转矩又减小,其工作点沿着曲线①上升。
当工作点上升到Q点,电磁转矩减小到和负载转矩TL相平衡时,转速不再升高,如负载转矩等于额定转矩,则转速也等于额定转速nMN,拖动系统开始稳定运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。