



【摘要】:2.切换成△联结当时间继电器KT计时结束时,电动机的运行点已经到达曲线②的B点,这时:KT的动断触点断开,KM断电,电动机绕组开路;KT的动合触点(3-5)闭合,接触器KM△得电,电动机绕组接成△形,电动机的运行点跳转到曲线①的C点,动态转矩增大,转速上升,当上升到D点后进入稳定运行状态,起动完毕。
根据控制要求,我画了一个控制电路,说明如下:
1.电动机 接起动
接起动
按下SB2:
接触器KM得电,通入电源;
接触器KMY同时得电,电动机绕组接成 形,并起动。这时,电动机的机械特性如图4-13b所示;
形,并起动。这时,电动机的机械特性如图4-13b所示;
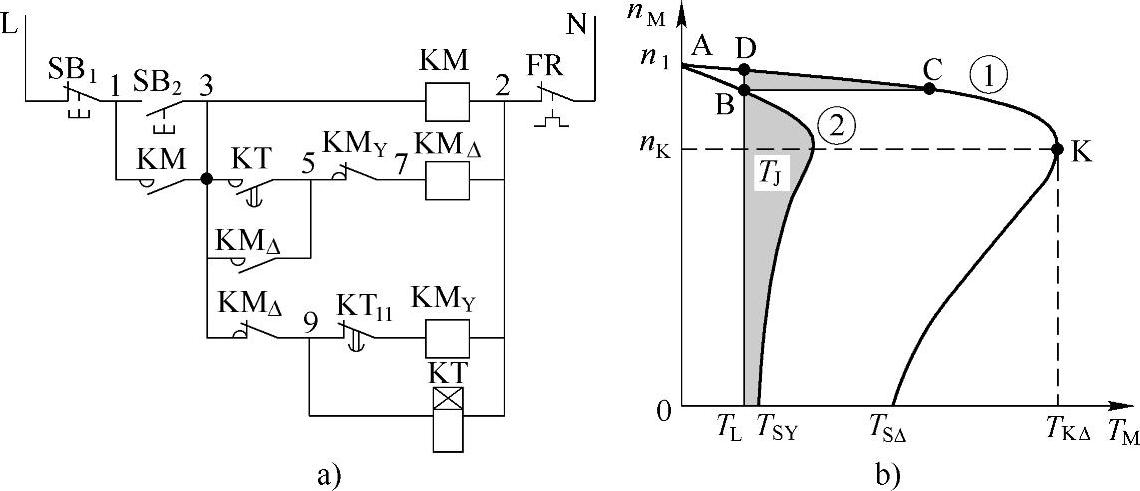
图4-13  -△起动的控制电路
-△起动的控制电路
a)控制电路 b)机械特性
时间继电器KT同时得电,开始计时。
2.切换成△联结(https://www.xing528.com)
当时间继电器KT计时结束时,电动机的运行点已经到达曲线②的B点,这时:
KT的动断触点(9-11)断开,KM 断电,电动机绕组开路;
断电,电动机绕组开路;
KT的动合触点(3-5)闭合,接触器KM△得电,电动机绕组接成△形,电动机的运行点跳转到曲线①的C点,动态转矩增大,转速上升,当上升到D点后进入稳定运行状态,起动完毕。
总的来说, -△起动法比较简单实用,但有两条缺点:
-△起动法比较简单实用,但有两条缺点:
第一是起动转矩太小,如图4-13b所示;
第二是只适用于△联结的电动机。
老师有什么需要补充的吗?”小李嘴上虽这么问,其实心里是挺得意的,总觉得自己如老师备课一般,思考得十分地周全了。
没想到张老师说:“首先要更正你方才说的第二条缺点,我们曾经说过,只有3kW以下的电动机才采用 联结。而3kW以下的小电动机通常是允许全电压直接起动的。所以,这一条缺点在实际工作中几乎不存在。
联结。而3kW以下的小电动机通常是允许全电压直接起动的。所以,这一条缺点在实际工作中几乎不存在。
除此以外,需要补充下面的问题:
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。