



1.离底高度控制
磁法探测海底电缆目前主要以船尾拖曳式单探头磁力仪为主要手段。根据前文所述,不同海底电缆所产生的磁场强度的原理可知,缆线在相同埋深的情况下所产生的磁场与电缆本身的内部结构以及工作原理有关,相关实验表明:在海底电缆模型中,电流模型占主导地位,海底电缆产生的磁场强度随着埋深的增加而急剧减小。为保证埋深2m,磁场较弱的电缆也能被探测到,建议在海底电缆的探测中,拖鱼距离海底电缆理论上最大不能超过10m,理想距离为2~5m。
为使拖鱼下沉,可以采取三种办法,
1)加配重,如果是单独使用磁力仪拖鱼,首先保证磁力仪拖缆大于三倍船长,避免船体本身磁性干扰,另外需在距拖鱼较近位置的海缆上加上多个铅块配重,每个铅块重量大于2kg,铅块使拖鱼因重力而下沉,在深水区域,需要较多的铅块配重,而较多的配重往往影响到拖鱼的姿态,因此使用的该方法常用于水深不大的近岸海域作业;
2)以拖曳式侧扫拖鱼(或者侧扫浅剖二合一)作为前导,将磁力仪拖鱼用特制的9m或者10m缆与前导拖鱼连接(图7-9),由于前导拖鱼作为配重且一般重量较大,加之其自身姿态,即使在深水中也能保持良好,故而在深水区域多使用此拖曳方法;
3)降船速,很低的船速可以确保拖鱼在到达海底电缆的已知坐标点附近时能以较小的离底高度从上面缓缓滑过。当船速过高时,拖鱼沉不下去。

图7-9 磁力仪管线外业调查实施示意图
2.位置精度控制(https://www.xing528.com)
海底电缆探测过程中,磁力仪传感器拖于测量船的尾部,由于要保证拖鱼距离船尾三倍船长,拖缆长度几十到几百米,而GPS定位系统位于测量船上。受船速、流速及流向等因素的影响,单独使用GPS系统存在较大定位误差,难以准确确定磁力仪传感器的位置,因此有的业主要求测量中配合使用超短基线(Ultra Shot Baseline,USBL)定位系统。USBL是水声定位系统的一种,主要由水声换能器、应答器和数据采集系统组成。USBL使用时,将水声换能器固定于船舷一侧的海水中,应答器捆绑在磁力仪拖缆上,为保证定位精度并且不能干扰磁力仪工作,应答器距磁力仪传感器的距离一般在10m左右或者直接绑定在前导拖鱼上。为保证定位精度,USBL需要配合差分GPS、涌浪校正系统和罗经等外围传感器使用。
3.测线布设
按照海底电缆管道路由勘察规范的要求,海底缆线磁力探测测线一般垂直于已敷设缆线布设,并以路由交汇点为中心布设3条测线,测线长度1km,测线间距200m(见图7-10)。为了能够更好地确定缆线的位置和走向,进一步消除探测定位误差,可垂直于已敷设海缆布设5条测线,中间3条测线间距200m,两侧测线外延至300m处。此外为尽量减小由于磁力仪拖鱼定位不准引起的系统误差,中央一条测线补测反航向测线(见图7-11)。
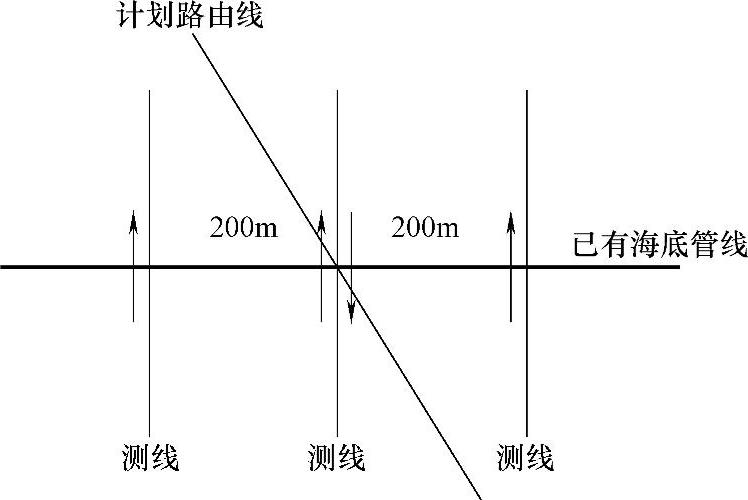
图7-10 海底电缆磁力探测3条测线布设法

图7-11 海底电缆磁力探测5条测线布设法
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。