



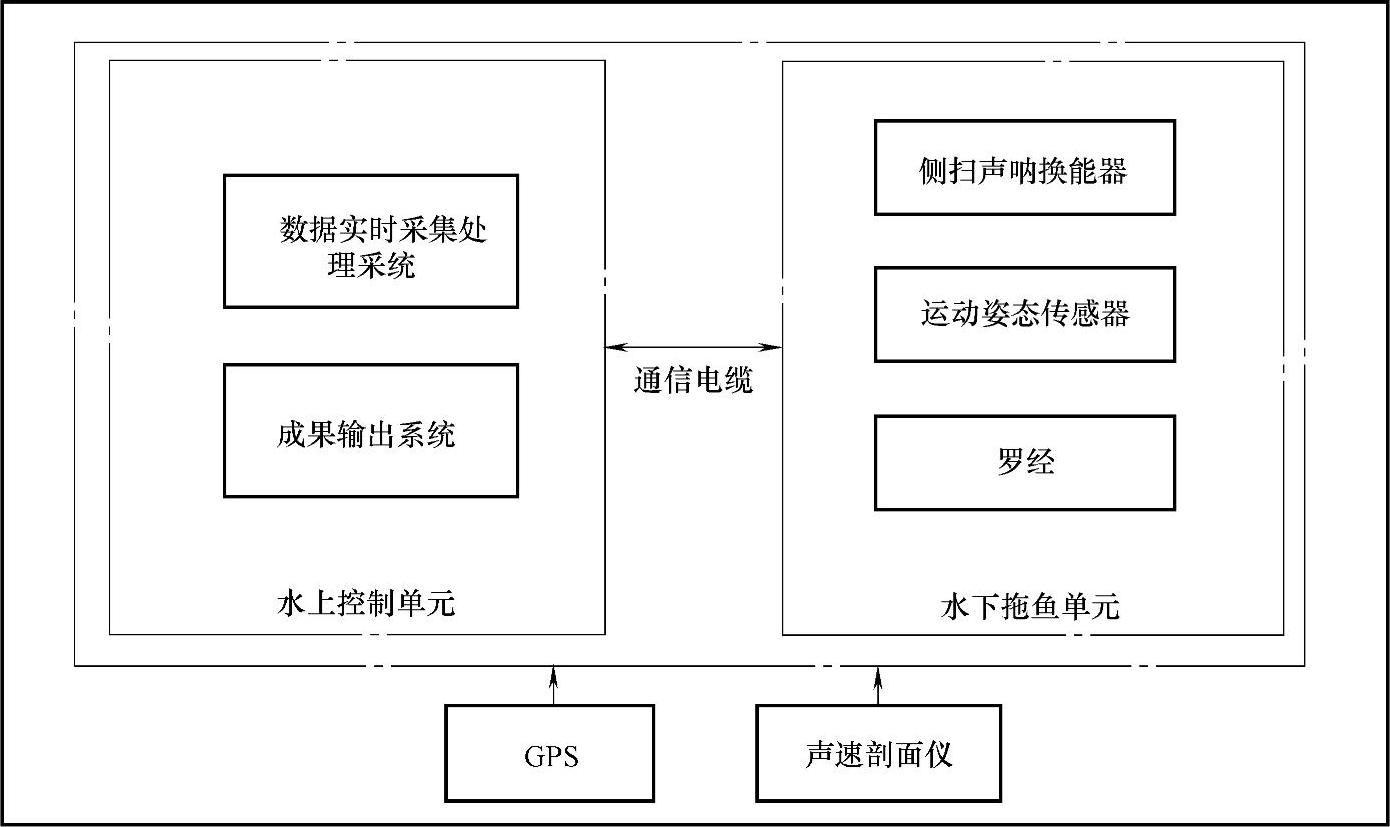
侧扫声呐系统是由多个子系统组成的复杂系统,尽管不同型号侧扫声呐系统在设计细节上有所差异,但其基本组成相同,大体上可分为侧扫声呐声学系统、外围辅助传感器、数据实时采集处理系统和成果输出系统。而一般的侧扫声呐按硬件组成划分的话主要分为两个部分:水上控制单元和水下拖鱼单元,其中水上控制单元包括数据实时采集处理系统和成果输出系统,而水下拖鱼单元一般包括侧扫声呐声学换能器、罗经和姿态传感器,而GPS和声速剖面仪则为外部辅助设备。图4-3给出侧扫声呐系统的基本组成单元。
换能器作为侧扫声呐声学系统,是系统的核心部件,它是声电转换装置。大多数侧扫声呐换能器采用压电陶瓷结构,当一个电压加到发射换能器上时,引起其物理形态发生改变,将由发射机所产生的振荡电场转换成机械形变,这种形变传送到水中,在水中产生振荡压力,即声脉冲;同样,接收换能器用来接收回声信号,通过检测声压力变化,将这种压力变化转换成电能。现代侧扫声呐系统在换能器设计时采用收发合一的线列阵,使声能在水平线以下范围内集中。
外围辅助传感器主要包括定位传感器、姿态传感器、声速剖面仪和罗经。定位传感器采用GPS定位系统,主要用于测量时的实时导航和定位,为侧扫声呐换能器提供位置信息;姿态传感器主要负责换能器横摇、纵摇和艏摇参数采集,实时反映换能器姿态变化,用于后续声呐图像改正;罗经主要提供拖体航向,用于后续回波点归位计算;声速剖面仪用于获取海水中声速空间变化结构,它直接影响回波点点位归算精度。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-3 侧扫声呐系统的基本组成单元示意图
侧扫声呐数据采集系统实现波束形成,将接收到的回波信号转换为数字信号,并反算、记录其往返程时间。数据实时处理系统主要指甲板实时处理单元,根据数据采集系统获取的数据,实时显示海底声呐图像,便于操作者了解成果有效性,指导后续工作。成果输出系统主要包括数据后处理及成果输出。综合各类外业数据,通过相关数据处理软件对这些数据进行处理,最终获得各有效波束在海底反射点在地理坐标系下的坐标及反射强度,最终形成测量成果,输出声呐图像。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。