



传统GNSS系统只能实现船只及固定安装在船只上仪器设备的导航定位,在海底电缆路由勘察中最常涉及水下拖体的作业及水下作业,如浅地层剖面仪、侧扫声呐、磁力仪等水下拖鱼设备以及ROV、AUV、潜水员等水下作业载体,为保证拖鱼姿态以获取高质量的调查数据以及减少船只对声呐设备的信号干扰,拖鱼往往需要释放一定长度的电缆拖曳在调查船尾,如何获取这些水下设备或载体的精确位置,实现其水下的导航定位,就需要用到水下导航定位技术。目前世界上主流的水下导航定位技术有水下声学定位和惯性导航定位,惯性导航定位主要用于军事水下运载器的导航定位,本书主要介绍海底电缆路由勘察中最常使用到的水下声学导航定位系统。
水下声学导航定位系统主要有三种形式:超短基线(Ultra Short Baseline,USBL)定位系统、短基线(Short Baseline,SBL)定位系统、长基线(Long Baseline,LBL)定位系统,以上三种形式是根据基线长度进行的分类。
1.水下声学导航定位系统的组成
水下声学导航定位系统一般由水听器阵、应答器和水下信标组成。水听器是用来在水中接收声学信号的装置;应答器是发射和接收声信号的装置;水下信标是接收应答器发出的声信号并给予回应的装置;基线长度指的是水听器阵之间的距离。
2.水下声学导航定位系统及特点
(1)超短基线系统
超短基线定位系统的所有声学单元(3个以上)(见图2-18),集中安装在一个换能器中,组成声基阵,基线长度小到几厘米。声单元之间的相互位置在出厂时精确测定,组成声基阵坐标系,声基阵坐标系与船的坐标系之间的关系要在安装时精确测定,包括位置(X、Y、Z偏差)和姿态(声基阵的安装偏差角度:横摇、纵摇和水平旋转)。系统通过测定声单元的相位差来确定换能器到目标的方位(垂直和水平角度);换能器与目标的距离通过测定声波传播的时间,再用声速剖面修正波束线确定距离。以上参数的测定中,垂直角和距离的测定受声速的影响特别大,其中垂直角的测量尤为重要,直接影响定位精度,所以多数超短基线定位系统建议在应答器中安装深度传感器,借以提高垂直角的测量精度。超短基线定位系统要测量目标的绝对位置(地理坐标),必须知道声基阵的位置、姿态以及船艏向,这可以由GPS、运动传感器和电罗经提供。系统的工作方式是距离和角度测量(Range/Angle)。
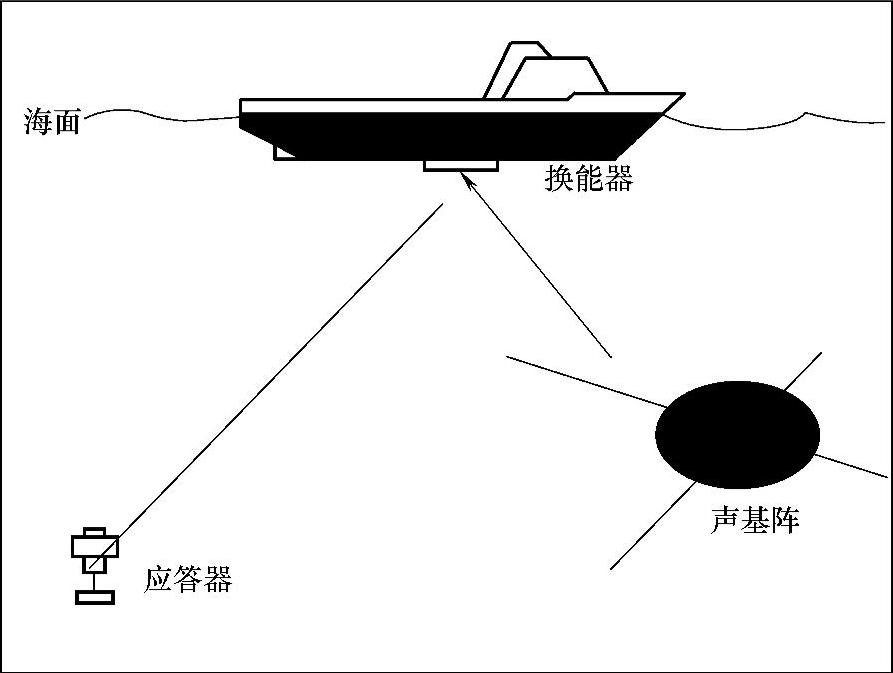
图2-18 超短基线定位系统示意图
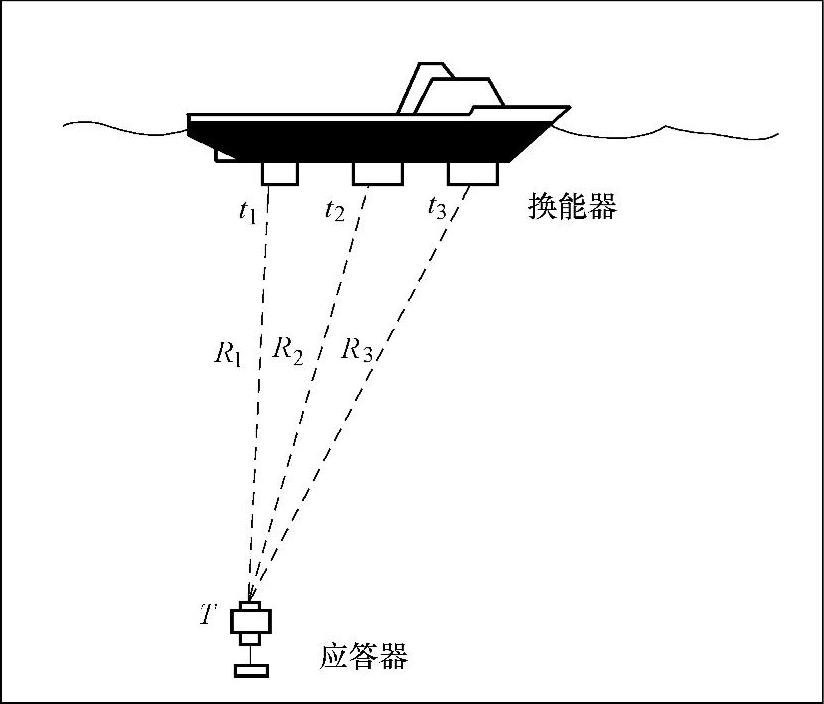
图2-19 短基线定位系统示意图
(2)短基线系统
短基线定位系统由3个以上换能器组成(见图2-19),基线长度为1~50m,也指基线长度远小于海水深度的系统。短基线系统要求被定位的船只或水下载体上至少有三个换能器,换能器的阵形为三角形或四边形,水听器布置于母船底部,组成声学基阵。换能器之间的相互关系精确测定,组成声学基阵坐标系,基阵坐标系与船坐标系的相互关系由常规测量方法确定。短基线系统的测量方式是由一个换能器发射,所有换能器接收来自信标(或应答器)发出的信号,得到一个斜距观测值和不同于这个观测值的多个斜距值,系统根据基阵相对船坐标系的固定关系,配以外部传感器观测值,如卫星导航定位系统、MRU、Gyro提供的船的位置、姿态、船艏向值,计算得到目标的大地坐标。系统的工作方式是距离测量(Range/Range)。
(3)长基线系统
长基线系统包含两部分,一部分是安装在船只或水下载体上的换能器,另一个部分是应答器布置于海底,一般情况下海底基阵由三个以上的应答器组成(见图2-20)。应答器之间的距离构成基线,基线长度按所要求的工作区域及应答作用距离确定,长基线系统的基线长度为100~6000m,也指基线长度可与海深相比拟的系统,相对超短基线、短基线,称之为长基线系统。应答器的相对阵型必须经过认真的反复测量,需要几小时甚至几天的时间。长基线系统利用海底应答器阵来确定载体的位置,定出的位置坐标是相对于海底应答器阵的相对坐标,因此必须知道海底应答器阵的绝对地理位置才能确定载体在大地坐标系中的绝对位置。
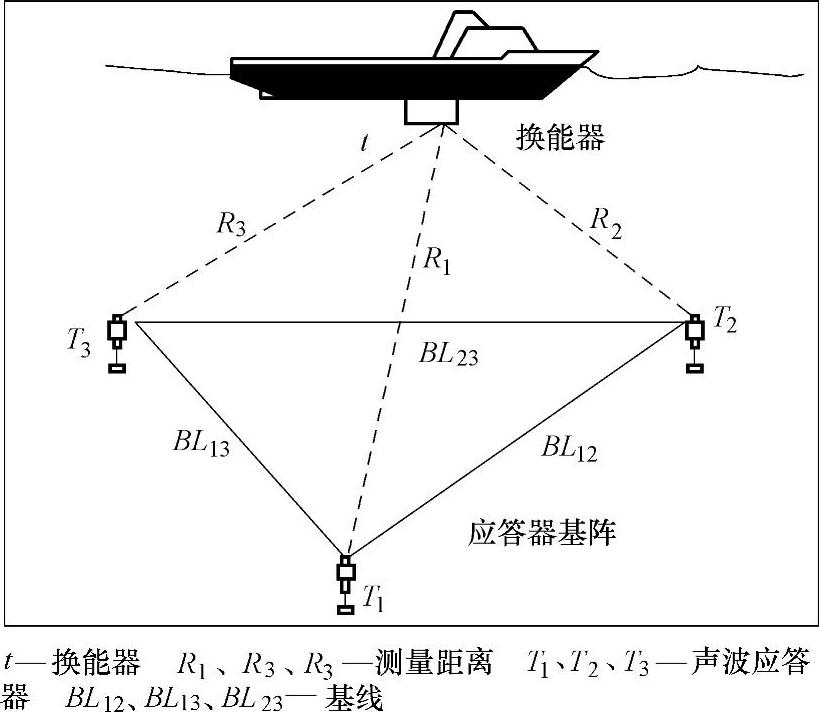
图2-20 长基线定位系统示意图
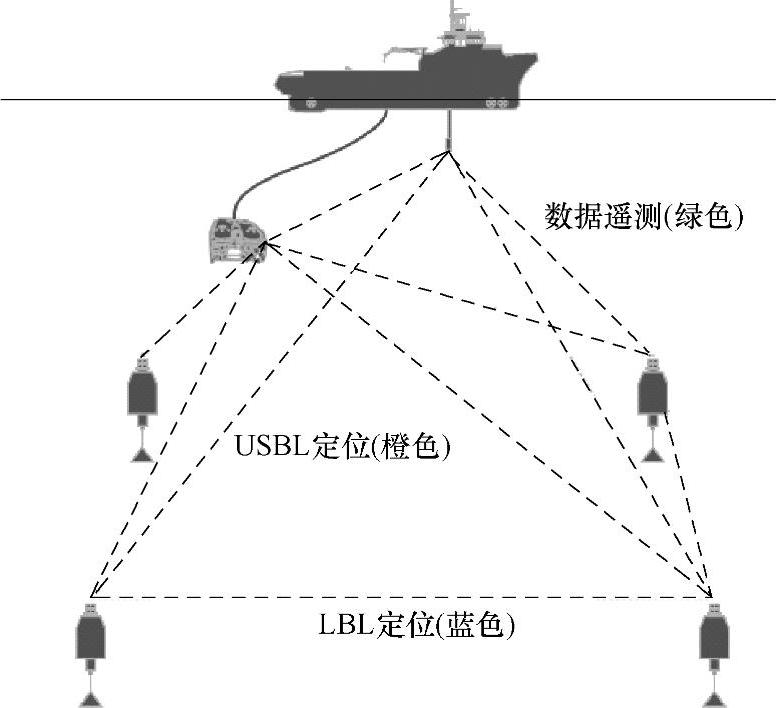
图2-21 长基线作业原理图
长基线系统是通过测量换能器和应答器之间的距离,采用测量中的前方或后方交会对目标定位,所以系统与深度无关,也不必安装姿态、电罗经设备,即长基线定位是基于距离测量。从原理上讲,系统导航定位只需要2个海底应答器就可以,但是产生了目标的偏离模糊问题,另外不能测量目标的水深,所以至少需要3个海底应答器才能得到目标的三维坐标。实际应用中,需要接收4个以上海底应答器的信号,产生多余观测,提高测量的精度,该原理与卫星定位原理类似,如图2-21所示。系统的工作方式是距离测量(Range/Range)。
3.三种定位系统的比较
水声定位系统的具体特点比对见表2-5。
表2-5 三种声学定位系统性能比对
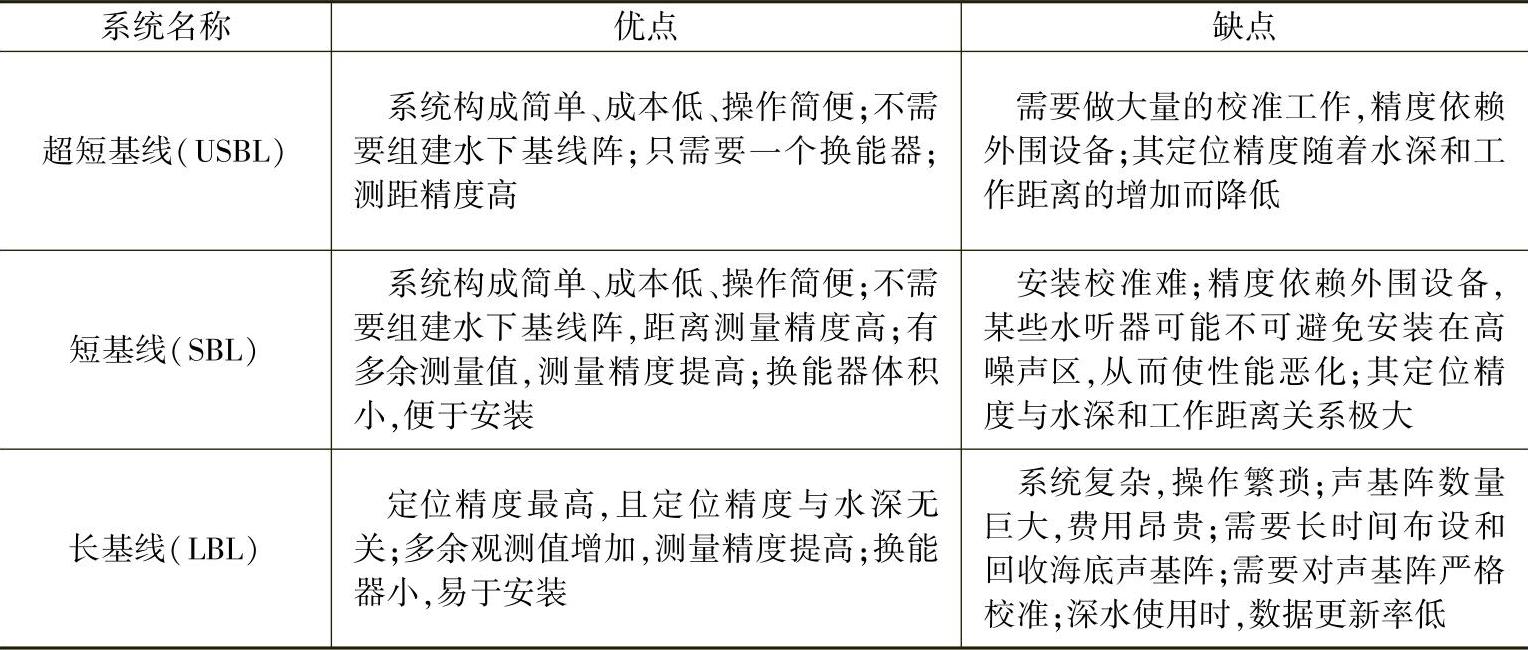
1)超短基线系统的定位精度往往比其他两种系统差,因为它只有一个尺寸很小的声基阵安装在载体上。它的基阵作为一个整体单元,可以布置在流噪声和结构噪声都较弱的位置。超短基线系统相对低价、操作简便容易,依赖高精度的外围设备,如电罗经、姿态传感器来获得目标物的高精度定位。系统安装后需要进行非常精准的校准工作,而往往这一点难以达到。
2)短基线同样具有低价集成和操作简便的特性,短基线系统不需要布置多个应答器并进行校标,因而定位导航比较方便。短基线基于时间测量的高精度距离测量,固定的空间多余测量值是获取高精度定位信息的技术保障。缺点是部分水听器可能必须安装在高噪声区(如靠近螺旋桨或发动机的部位),以致跟踪定位性能恶化。一般来说,短基线系统的定位精度处在超短基线系统和长基线系统之间。
3)长基线系统可以获得高精度且独立于水深值的定位效果,长基线系统基线最长,多余观测值增加;对于大面积的调查区域,可以得到非常高的相对定位精度,因而定位精度最好。缺点是要获得这样的精度必须精确地知道布放在海底的应答器阵之间的相互距离,这就要花费很长的时间测量基阵间距离。在深水使用时,位置数据更新率较低,达到分钟的量级。此外,布放和回收应答器也是一件很复杂的事情,对操作者的要求比较高。
这三种导航系统可以单独使用,也可以组合使用,构成组合系统。组合系统既可以提供可靠的位置冗余,也可以体现各个系统的优点。
目前在海缆路由勘察中,主要使用超短基线导航定位系统为水下拖体提供精确的定位信息。将超短基线声学定位系统的换能器通过固定杆安装在调查船船舷或者船舱(主流方式是安装在船舷),船舷式安装操作相对简便。调查作业时,将水下信标绑缚在需水下定位的目标上即可,而且可以同时跟踪多个水下目标,满足多载体同时作业的定位需求。长基线导航定位系统主要应用在深水海域需要高精度定位的领域,如水下结构物安装对接、深水海底管线铺设等。
4.常见的水下定位设备
国际上主流的水下声学导航定位设备有英国Sonardyne公司的各种水深适配设备(Scout系列、Ranger系列、Fusion系列),法国IXBlue公司的GAPS系列,挪威Kongsberg Marinetime公司的HiPAP系列,美国ORE公司的TrackPoint3系列,英国AAE公司的EasyTrack系列等。这些产品各有千秋,本文着重简要介绍几种常见设备。
(1)GYRO USBL(https://www.xing528.com)
英国Sonardyne公司新近推出了基于WindBand2技术的GYRO USBL水下声学定位系统,该声学定位系统集成了Sonardyne公司的Lodestar水下激光惯性陀螺(能够提供0.1°的艏向精度,0.01°的姿态精度),该系统无需用户像使用传统的USBL那样做动态的校准,用户只需要将其固定在船舷或者船舱即可。图2-22为GYRO USBL的甲板单元与换能器。

图2-22 GYRO USBL甲板单元与换能器
系统的主要技术指标:跟踪距离:7000m;声学覆盖:+/-90°;重复精度:0.1%;测距精度:15mm。
(2)Fusion LBL
英国Sonardyne公司的LBL长基线定位技术是当前高精度定位的唯一可靠的技术手段,是为深海、浅海海洋工程施工,模块安装,管线铺设和对接,高精度拖体定位跟踪,ROV定位导航,DP船声学定位参照,AUV定位跟踪、遥控等提供厘米级定位的技术方案。其广泛应用于海洋石油和天然气工业、军事领域等。顾名思义,该系统的测量基线是最长的,通常为数百米至数公里。图2-23为Fu- sion LBL系统示意图。
LBL系统由分布于海底的发射应答器阵,组成水下长基线阵列,阵列经过校准后,任何在阵列中的目标和水面船的测距精度可以达到1~2cm,相对定位精度可高达5cm以内,且不受任何水深的限制。系统定位的原理采用完全的测距定位技术。采用当前最新的数字声学技术的Sonardyne LBL系统除了能够提供高精度定位外,它还具备数量更多的通道,对于大型的复杂的油田开发项目,能够满足多船、多ROV同时同地施工,而不会相互干扰,同时也是唯一能够提供USBL兼容和高速数据遥测的声学技术。
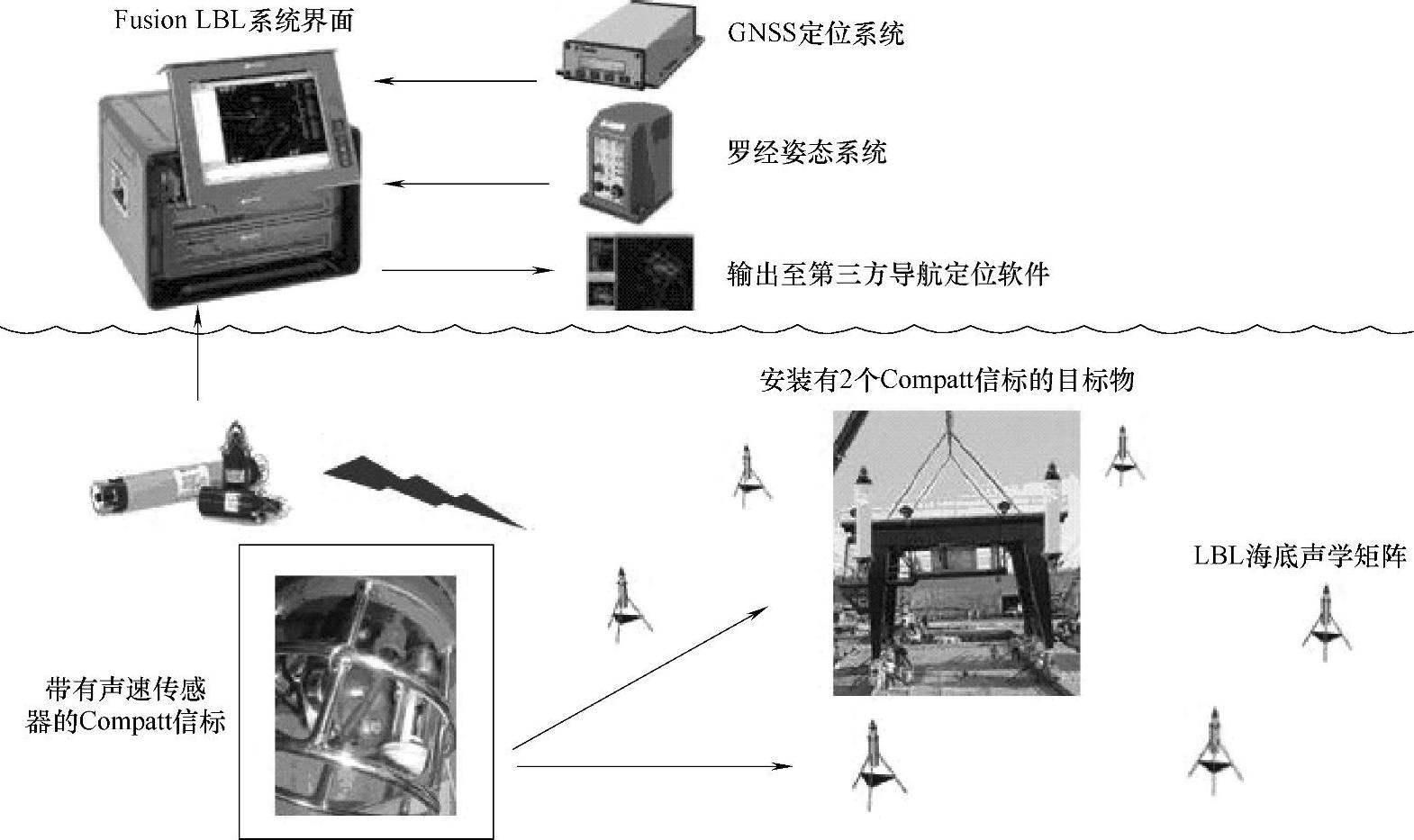
图2-23 Fusion LBL系统示意图

图2-24 GAPS换能器
(3)GAPS USBL
法国IXBlue公司GAPS型全球声学定位系统是一套无需标定的便携式超高精度超短基线(USBL)系统,它将惯性导航与水下声学定位完美地结合在一起,并融入了GPS定位技术,这使它能最大限度地满足水面和水下定位及导航的需要。可同时对多个水下目标(ROV、AUV、拖鱼)精确定位,并可提供高精度的姿态及航向数据。即使在GPS数据中断或有跳点的情况下,仍不丢失定位数据。在系统的有效作用距离内,不管水深多大,均可保持水下目标定位数据的高速更新输出。图2-24为GAPS换能器。水下定位精度:斜距的0.2%,有效距离:4000m,覆盖范围:200°(声学阵下方),工作频率:20~30kHz。
(4)HiPAP USBL
挪威Kongsberg Marinetime公司HiPAP家族系列产品拥有世界上最为成功的水下定位系统。它最初是因专注于超短基线定位而开发的,因为市场需要尽力避免长基线定位在深水、精确海底测量中的应用。整个HiPAP系列产品都使用了同样的高级换能器核心技术,同数字声学信号处理一起,使得HiPAP成为精度最高和最可靠的USBL系统。
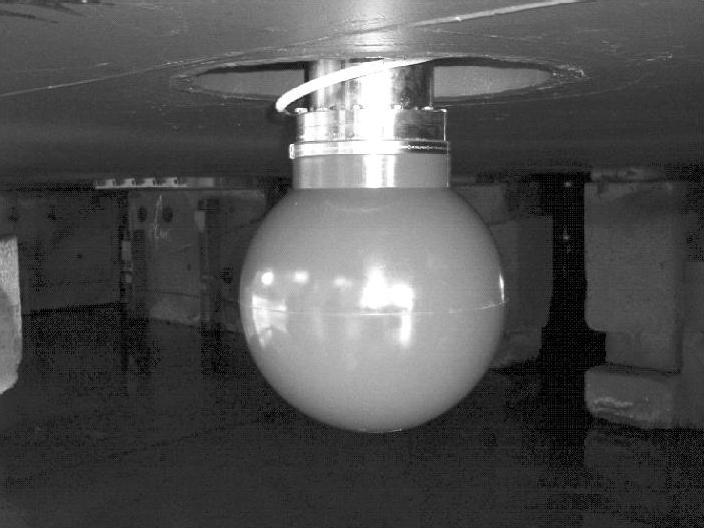
图2-25 HiPAP 501系统换能器安装图
HiPAP 501系统将上百个基元安装在一个球形的换能器中,这些换能器基元使得该系统能够获得极高的内部冗余度和可靠性,大大提高了精度和稳定性。图2-25为HiPAP501系统换能器。
HiPAP系统采用了新的Cymbal声学通信和定位协议,Cymbal技术利用直接序列展布(DSSS)信号来定位和数据通信,数据通信速率可以根据适应声学通信的环境而变化,例如噪声、多路径干扰。DSSS是一种宽带信号。由于Cymbal脉冲拥有更高的能量,因此它能提供更高的定位精度、极为精确的距离测量精度、超长测距能力和高速数据通信速率。
(5)EasyTrack USBL
英国AAE公司的EasyTrack系统包括全套水下定位系统硬件和软件,并提供多种配置选项,可应用于全球各类工程项目需求。它能发射接收声学信号来动态定位海底目标,得到目标的距离、方位和深度信息。系统包括专业GPS接收采集软件和USBL系统控制软件,内置Pitch/Roll/Heading等运动传感器,可以同步跟踪多个水下目标。系统可进行水平跟踪,能够定位相关漂浮目标,例如AUV的回收等。图2-26为EasyTrack USBL的设备图。

图2-26 EasyTrack USBL设备图
主要技术参数:
斜距精度:10cm(精度与声速校正数据相关);
定位精度:1.40°dRMS,2.5%斜距(标准);0.60°dRMS,1.0%斜距(高精度);
方向分辨率:0.1°(显示),中心计算分辨率可达0.01°;
艏向精度:0.8°RMS;
横摇/纵摇精度:±0.20°RMS。
目前,国产设备有哈尔滨工程大学、中海达等科研院校和仪器公司在进行水下定位相关方面的研发,但形成一定的市场规模尚需时日。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。