



(一)系统原理及结构
高压开关的断路器机械状态通常可由其机械特性的监测获得,影响断路器机械特性的因素通常包括分合闸时间、分合闸同期性、分合/合分时间、行程、开距、超程、分合闸速度、时间-行程特性、脱扣器的延时及返回特性、储能时间、辅助开关与主触头的配合、分合闸操作电压/电流稳定值等。通过对机构的操作回路和机构行程的监测可间接地测量这些参量。断路器机构机械状态监测的系统图如图6-40所示,监测内容及要求见表6-2。
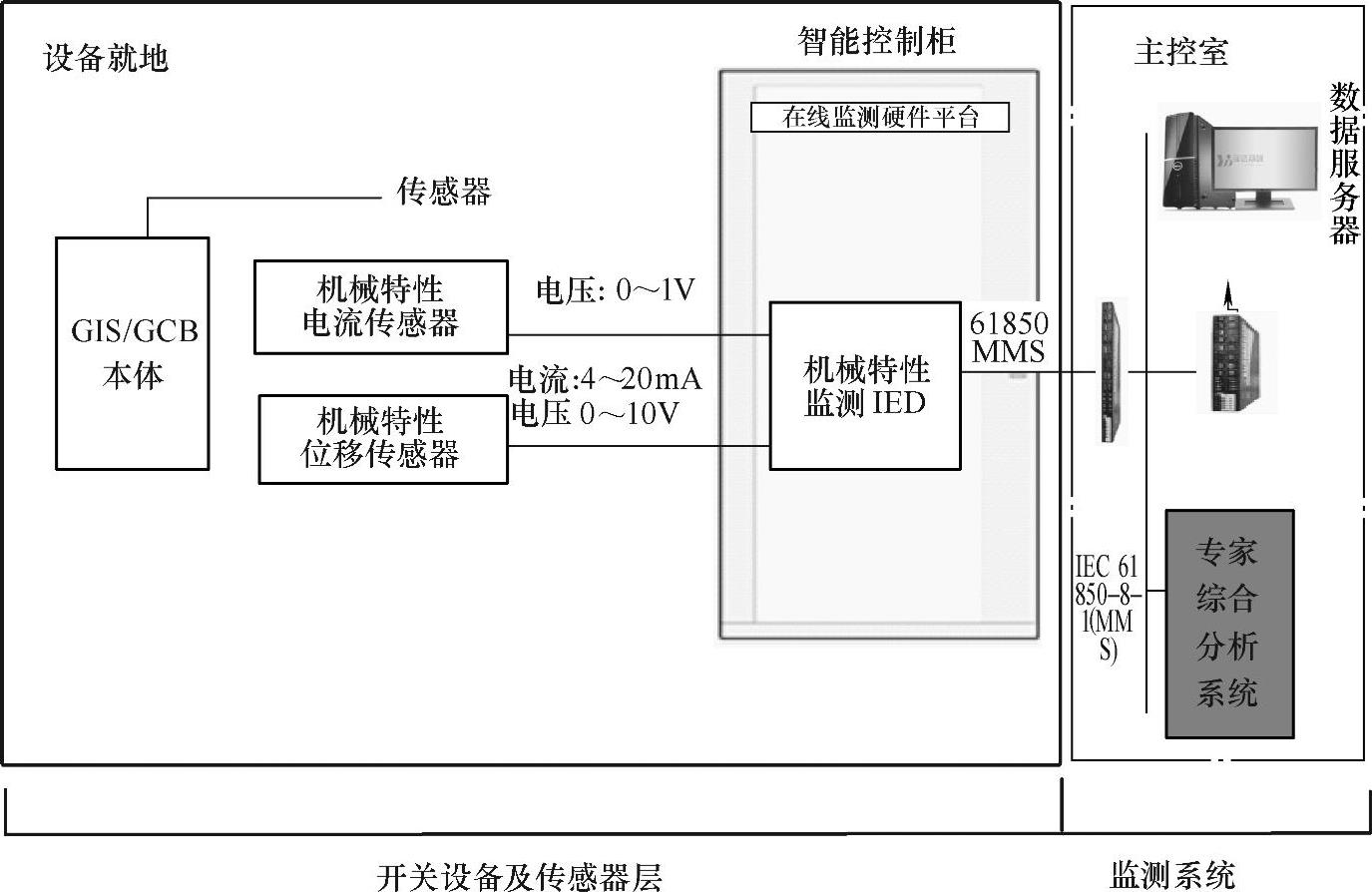
图6-40 断路器机构机械状态监测的系统图
表6-2 操动机构状态监测项目技术要求

(二)传感器
1.电流传感器(霍尔传感器)
小电流传感器,主要测量高压开关设备的断路器分、合闸线圈电流,储能电动机电流。通常采用霍尔原理,电流输入传感器中,传感器检测并输出0~5V、0~20mA(或4~20mA)的标准直流信号。
工作原理:被测电流In流过导体产生的磁场,由通过霍尔元件输出信号控制的补偿电流Im流过二次绕组产生的磁场补偿,当一次侧与二次侧的磁场达到平衡时,有
NIn=nIm (6-6)
式中 In——一次电流;
N——一次绕组的匝数;
Im——二次补偿电流;
n——二次绕组的匝数。
由式(6-6)看出,当已知传感器一次和二次绕组匝数时,通过测量二次补偿电流Im的大小,即可推算出一次电流In的值,从而实现了一次电流的隔离测量。电流传感器原理图如图6-41所示。
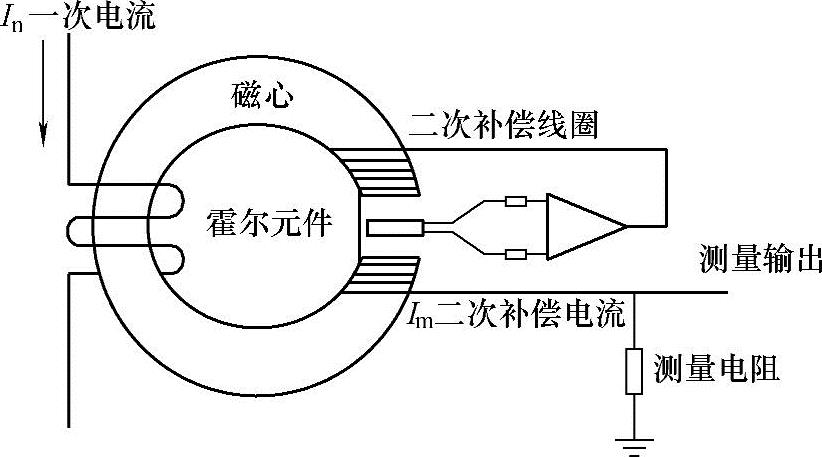
图6-41 电流传感器原理图
2.位移传感器
位移传感器是将物理量转换为电量的传感器,在测量机械运动方面,一般使用旋转编码器和激光测距传感器两种。
(1)旋转编码器 旋转编码器采用旋转测量技术,把机械位移量变成电信号,能用于测量长度、位置、速度或角度等。旋转编码器可安装在旋转传动的断路器中,即断路器操动机构传动连接中有转动轴,且该转动轴的转动特性能反映断路器分合机械特性。
旋转编码器按照信号原理来分,可分为增量型旋转编码器和绝对型旋转编码器。
1)增量型旋转编码器:增量型旋转编码器采用光电扫描原理工作,带一个径向线栅和空隙的码盘在光源(LED)和接收器之间旋转,产生一个与接收光成比例的正弦信号。值得注意的是,虽然编码器的安装从外部看应该归为接触式,但是因为码盘和光源以及接收器之间没有直接接触,因此关键部件没有机械磨损。编码器内部转动部件由轴承支承,大的轴承跨度和强壮的轴肩,能确保编码器在受到较强振动、冲击或因安装变差过大时的稳定性。编码器一般采用金属铸造或冲压外壳,并在轴径处采取密封措施,一般具有较高的防护等级和抗电磁干扰能力。图6-42为旋转编码器内部结构。
增量型旋转编码器按输出通道数可分为单通道输出、双通道输出以及三通道输出。单通道输出是指旋转编码器的输出是一组脉冲,而双通道输出的旋转编码器输出两组相差90°的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。如图6-43所示,由两个通道的相位差可判定编码器旋动的方向。
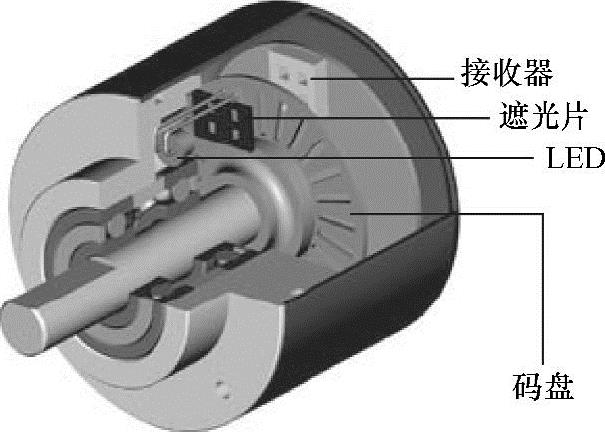
图6-42 旋转编码器内部结构
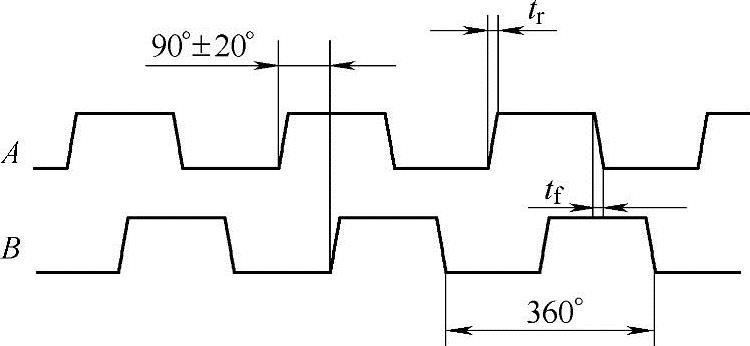
图6-43 双通道输出编码器输出信号波形
三通道输出编码器在双通道编码器的基础上增加一个零信号,每转出现一次。在上电期间第一转可用作参考信号。O脉冲为A和B的“与”,如图6-44所示。根据高压断路器的测量特点,需要测量开关的分合两个相反的动作过程,因此需要双通道甚至三通道的旋转编码器。
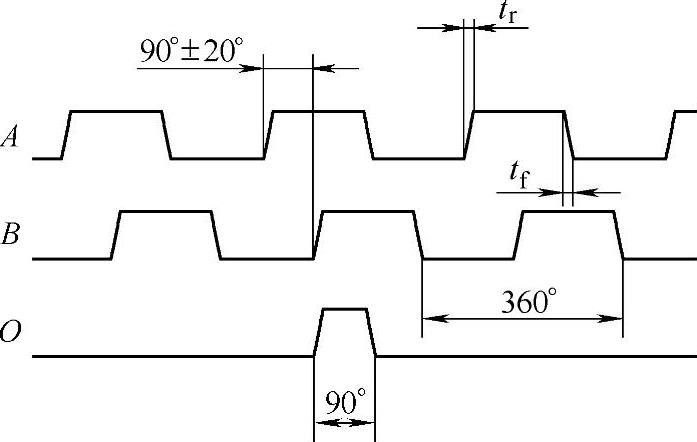
图6-44 三通道输出编码器的输出信号波形(https://www.xing528.com)
增量型旋转编码器的分辨率为传感器的关键参数,一般描述为脉冲/转(p/r),为编码器转一个圆周所输出的脉冲数。在选择编码器时可根据所需要的系统精度通过计算得到。比如断路器行程为180mm,安装传感器的转动轴旋转角度为90°,期望的精度为0.3mm。那么分辨率为

则按照期望的精度需要选用的分辨率应大于或等于2400p/r,根据主流厂家的旋转编码器的参数序列,应选择2500p/r的旋转编码器。
2)绝对型旋转编码器:绝对型旋转编码器的原理及结构与增量型旋转编码器相似,区别在于码盘上以一个同心轨道上的数字代码取代划线,一个唯一的位图谱确定每一个位置的数位值,其优势在于,在启动后无需参考驱动,可直接读出编码器所指示的位置。图6-45所示为一个采用格雷码(一种用于降低误码率的编码方式)的图谱,每一竖格代表一个数字,可由接收器接收并经解码芯片读出。
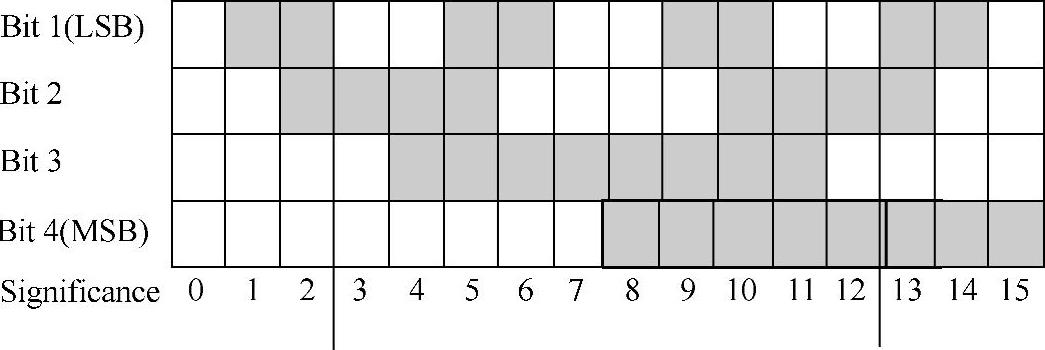
图6-45 格雷码图谱
根据增量型和绝对型旋转编码器的特点,可将它们分别应用于不同的场合,增量型旋转编码器价格较低,响应速度快,需要后台装置记录动作数据指示位置。因此一般用在不需要精确指示位置的测量行程及转速的场合。而绝对型旋转编码器因为指示位置准确,一般用在需要精确指示动作行程位置的场合。比如后台装置突然掉电重启,用绝对型旋转编码器仍能准确读出位置而用增量型旋转编码器则无法判断。高压断路器因为动作速度快,不需要准确指示每一个行程位置,而是对整个行程的数据进行测量,根据其特性通常选用增量型旋转编码器。
通常用在断路器上的旋转编码器的主要参数见表6-3。
(2)激光测距传感器 激光测距传感器是采用激光三角法测量原理和回波分析原理进行非接触位置、位移测量的精密传感器。它广泛应用于位置、位移、厚度、半径、形状、振动和距离等几何量的工业测量。如图6-46所示,半导体激光器被镜片1聚焦到被测物体上;反射光被镜片2收集,投射到线性CCD阵列上;信号处理器通过三角函数计算阵列上的光点位置得到距物体的距离。
表6-3 旋转编码器的主要参数
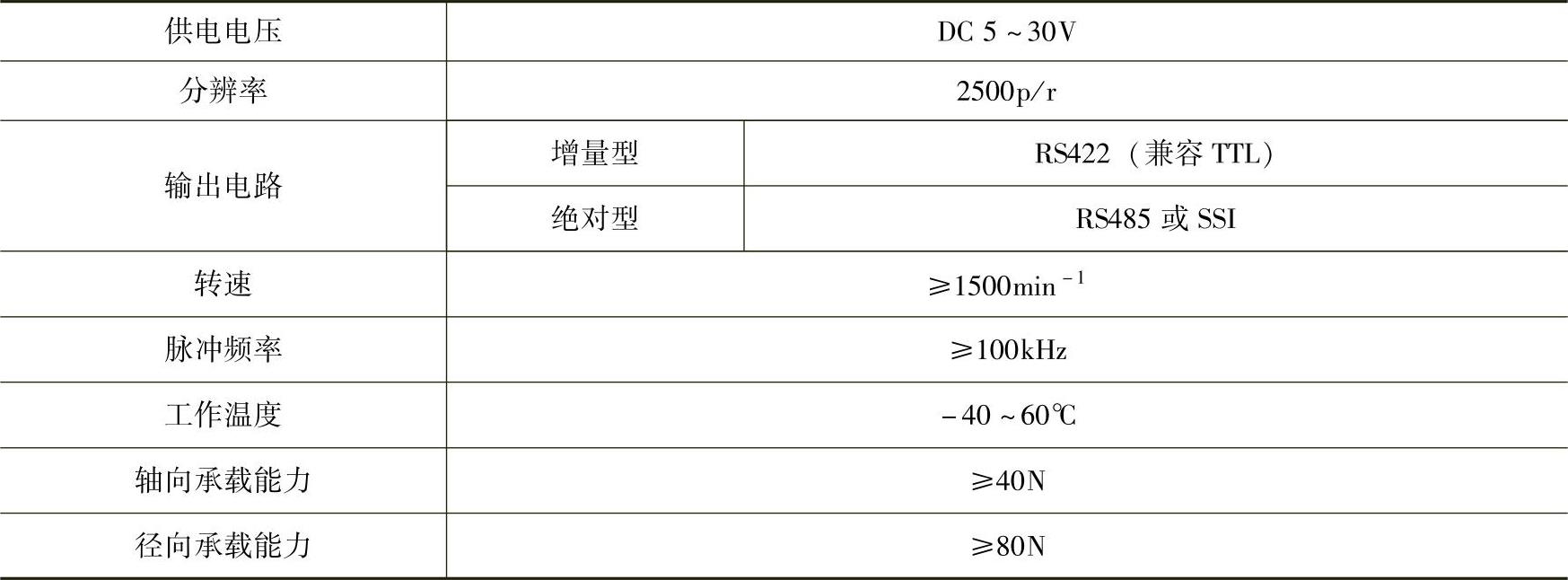
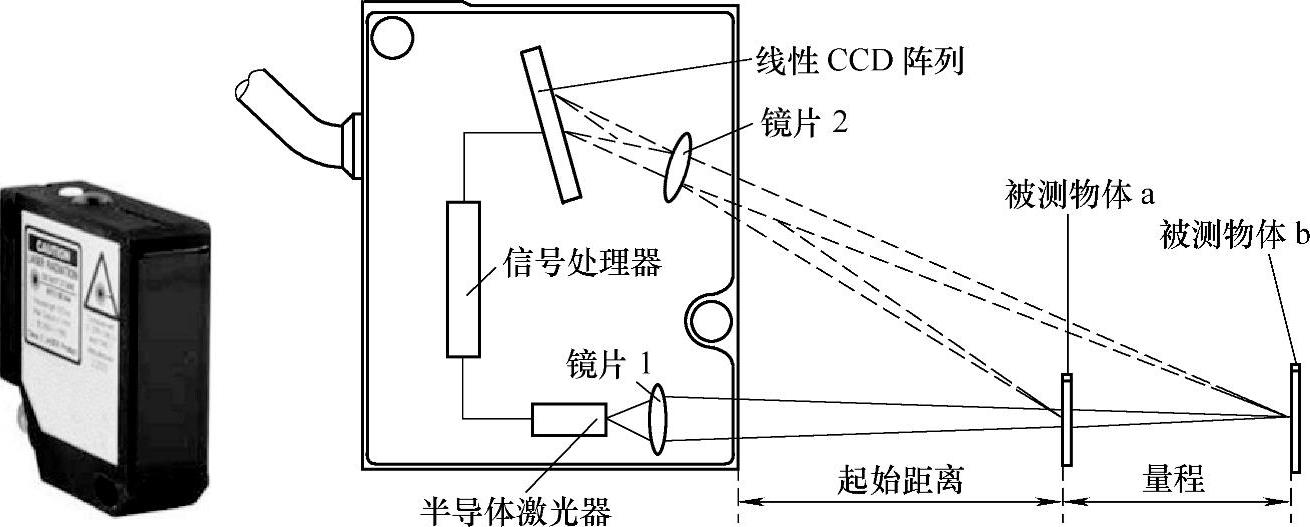
图6-46 激光测距传感器及测量原理图
激光测距传感器的测量范围通常在16~1000mm,具有很高的分辨率,目前主流厂家的产品最高可达±0.006mm的线性度和0.002mm的分辨率。因为可以连续测量,并且具有很快的响应时间,测量周期为0.9ms,因此可用来测量断路器的分合闸行程。
激光测距传感器为非接触位移传感器,因为其测距原理的特点,可用来直接测量直线位移。但是激光测距传感器温度范围较窄,主流厂家仅能做到-10~50℃,价格昂贵,常在万元以上,因此不作为首选,目前多用于旋转编码器无法安装的直线动作的断路器操动机构中。
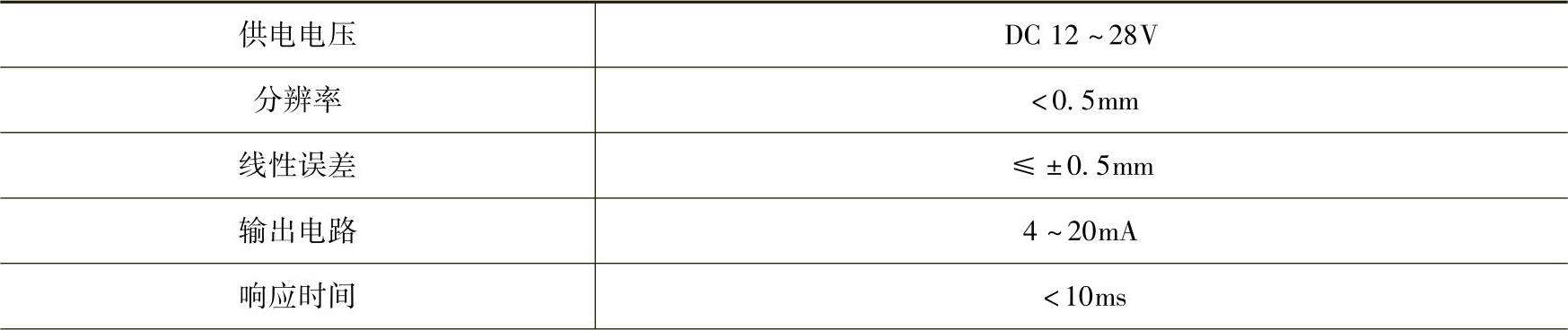
通常用在断路器上的激光测距传感器的主要参数见表6-4。
表6-4 激光测距传感器的主要参数
(续)

注:量程的选取应在满足要求的情况下选量程最短的。
(三)分、合闸线圈电流的监测
高压开关一般都是以电磁铁作为操作的第一级控制元件,并且大多数开关皆以直流作为控制电源。在每次分、合过程中,直流电磁线圈的电流随时间变化,此变化波形中蕴藏着极为重要的信息。线圈电流波形可以反映的状态有铁心行程、铁心卡滞、线圈状态(如是否有短路匝)、与铁心顶杆连接的铁闩和阀门的状态、合、分线圈的辅助接点状况与转换时间。通过对分合操作线圈动作电流的检测,运行人员可以大致了解开关二次控制电路的工作情况及铁心的运动有无卡滞等,为检修提供一个辅助判据。分合闸线圈的电流是开关状态监测的一个重要内容。通过霍尔传感器可以很方便地采集分合闸线圈的电流。通过实测的波形与典型波形进行比较即可判断开关的铁心有无卡滞等现象。
(四)触头行程的监测
高压开关的行程-时间特性是表征高压开关机械特性的重要参数,也是计算高压开关分、合闸速度的依据。高压开关分、合闸速度,尤其是开关合闸前、分闸后的动触头速度,对开关的开断性能有至关重要的影响。因此,高压开关的行程-时间特性检测,是高压开关检测的重要内容。由于开关动触头作直线运动,可以安装一个与动触头一起运动的附加件,当动触头做分、合操作时,该附加件随连杆运动,通过光电传感器,将连续变化的位移量变成一系列电脉冲信号。记录该脉冲的个数,就可以实现动触头全行程参数的测量;同时,记录每一个电脉冲产生的时刻值,将位移同时间相除,就可计算出动触头运动过程中的最大速度和平均速度。目前测量高压开关的行程-时间特性,多采用光电式位移传感器与相应的测量电路配合进行,常用的有增量式旋转光电编码器或直线光电编码器。
(五)储能电动机电流的监测
电动机的电压、电流反映了电动机的工作情况,如果是液压机构则反映了液压机构的密封性。通过霍尔传感器可采集电动机储能时的工作电流,进而判断电动机的运行状况。
(六)系统软件
在线监测数据可通过IEC 61850协议接入到数据监测分析系统中,亦可接入到远程诊断系统中,从而实现机械特性的综合分析和报警。分闸电流曲线如图6-47所示,合闸电流曲线如图6-48所示,位移-时间包络线曲线如图6-49所示,电动机储能曲线如图6-50所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。