



(1)动态检测
打开随书光盘中“Exercise\8\8.6.1&7.1-2\wanxiangjiechuandong.CATProduct”,显示具有运动函数的十字轴万向节传动机构(参见图7-1)。
单击“DMU一般动画(DMU Generic Animation)”→“综合模拟(Generic Simula tion)”工具栏中“模拟(Simulation)”功能图标 ,打开“运动模拟(Kinematics Simulation)”对话框并选择“使用法则曲线(Use Laws)”操作界面,参见图7-23及相关说明。
,打开“运动模拟(Kinematics Simulation)”对话框并选择“使用法则曲线(Use Laws)”操作界面,参见图7-23及相关说明。
在“DMU一般动画(DMUGeneric Animation)”→“碰撞模式(ClashMode)”工具栏内选择“碰撞检测停止[Clash Detection(Stop)]”图标 ,将“DMU一般动画(DMU Generic Animation)”工具栏设定为碰撞检测停止模式,如图8-38所示。
,将“DMU一般动画(DMU Generic Animation)”工具栏设定为碰撞检测停止模式,如图8-38所示。
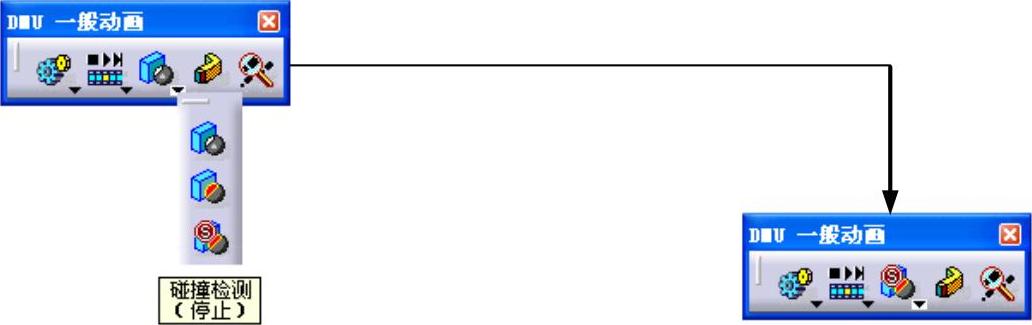
图8-38 设置碰撞检测停止模式
使用“运动模拟(Kinematics Simulation)”对话框的“使用法则曲线(Use Laws)”操作界面的播放器按钮播放机构运动。当齿条上的测试块与底座相接触时,机构运动停止,碰撞区域的轮廓线突出显示,如图8-39a所示。
若仅设置“DMU一般动画(DMU Generic Animation)”工具栏为“碰撞检测打开[Clash Detection(On)]”模式 ,则当测试块与底座发生接触时,机构运动并不停止,但系统将零部件碰撞后贯通区域的轮廓高亮显示,如图8-39b所示。
,则当测试块与底座发生接触时,机构运动并不停止,但系统将零部件碰撞后贯通区域的轮廓高亮显示,如图8-39b所示。
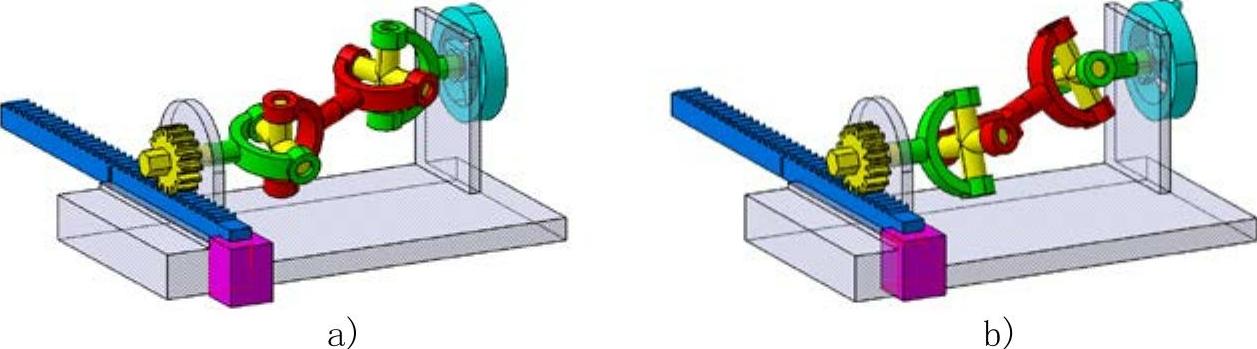
图8-39 运动机构碰撞检测情况
动态碰撞检测也可在使用“DMU运动机构(DMU Kinematics)”→“模拟(Simula tion)”工具栏中的“使用命令进行模拟(Simulation with Command)”和“使用法则曲线进行模拟(Simulation with Laws)”功能时,激活传感器,弹出的“传感器(Sensors)”对话框。
在“传感器(Sensors)”对话框左下部“检测碰撞(Detect Clashes)”设置区单击与“DMU一般动画(DMU Generic Animation)”→“碰撞模式(Clash Mode)”工具栏内相同的功能图标,设置不同的碰撞检测模式,播放机构运动启动检测,如图8-40所示。
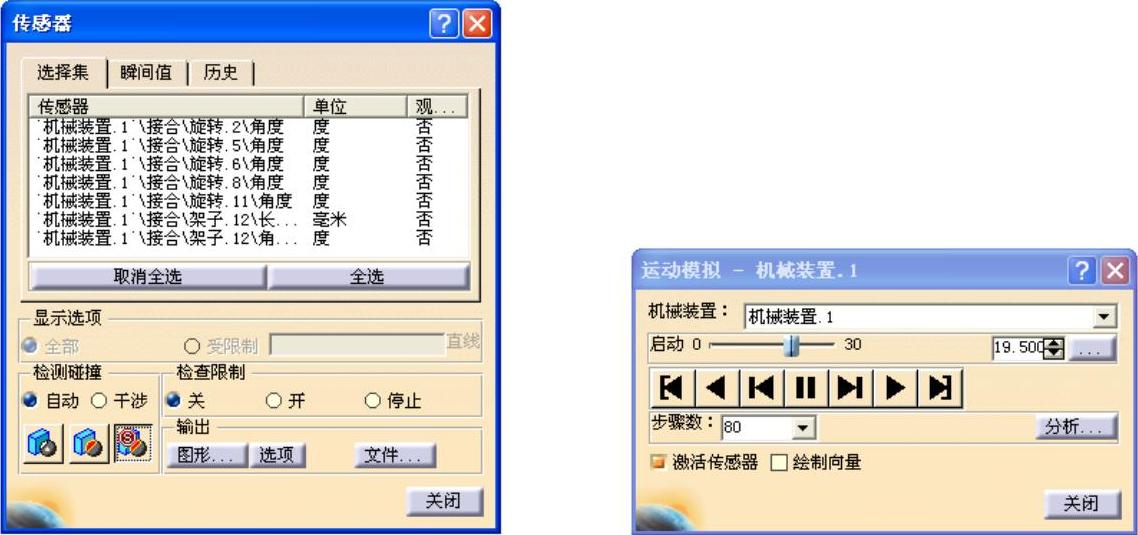
图8-40 通过激活传感器设置并检测碰撞
(2)静态检测
①检测设置。在“空间分析(Space Analysis)”工具栏中单击“碰撞(Clash)”图标 ,显示“检查碰撞(Check Clash)”对话框,如图8-41所示。
,显示“检查碰撞(Check Clash)”对话框,如图8-41所示。

图8-41 检查碰撞对话框
对话框“类型(Type)”选项栏下拉菜单中有4种干涉类型可供选择,如图8-42所示。

图8-42 检查类型
其中各类型含义为:
“接触+碰撞(Contact+Clash)”:检查干涉与接触。
“间隙+接触+碰撞(Clearance+Contact+Clash)”:检查干涉与接触的同时检查两个对象之间的最小距离是否超过规定值。当选中该类型时,类型栏后面的距离设置栏被激活,如图8-43所示。默认距离是5mm,可根据需要自行修改。
“已授权的贯通(Authorized Penetration)”:允许产生用户给定的渗透深度而不报告为干涉。当选中该类型时,类型栏后面的数字精度栏同样会被激活,可根据需要自行调整渗透值。
“碰撞规则(Clash Rules)”:基于“知识工程(Knowledgeware)”模块所编制的规则而进行的干涉检查。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-43 激活距离设置栏
对话框“类型(Type)”栏下面干涉检查范围默认为“在所有部件之间(Between All Components)”,检查范围的下拉选项中还有其他3个范围可供选择,如图8-44所示。

图8-44 检查范围
干涉检查范围各选项的含义为:
“一个选择之内(Inside One Selection)”:将待测试零部件均放在一个选择组内,检查组内所有选项之间的干涉情况。当选中该类型时,“选择:1(Selection:1)”栏被激活,如图8-45所示,可用鼠标在结构树或模型上选择零部件。
“选择之外的全部(Selection Against All)”:检查所选组内的每个零部件相对于其他运动机构零部件之间的干涉情况。选中该类型时,“选择:1(Selection:1)”栏同样被激活。
“在所有部件之间(Between All Components)”:系统默认选项,检查整个运动机构中每个零部件之间的干涉情况。
“两个选择之间(Between Two Selection)”:建立两个测试组,检查“选择:1(Selection:1)”组中每个零部件相对于“选择:2(Selection:2)”组中每个零部件之间的干涉情况。选中该类型时,“选择:1(Selection:1)”与“选择:2(Selection:2)”栏同时被激活。

图8-45 选择栏被激活
②检测。可针对运动机构的任意停止位置进行,现以万向节传动机构处于图8-39b所示状态时为例。将“检查碰撞(Check Clash)”对话框设置为默认状态(参见图8-41)。
单击”应用(Apply)”按钮,对话框扩展更新显示如图8-46所示。对话框中部显示检查结果:干涉数目(Number of Interferences)14个,其中,碰撞(Clash)项1个、接触(Contact)项13个、超过最小间隙(Clearance)项0个。对话框下部为检测情况的详细列表。
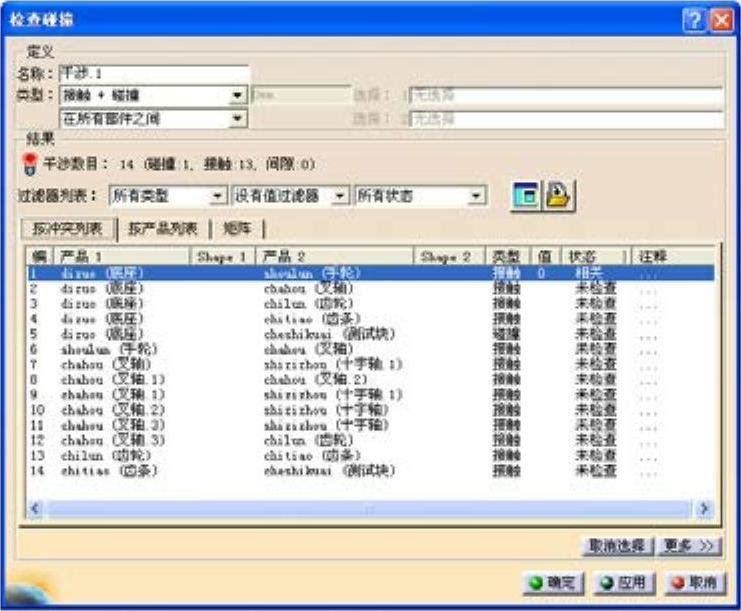
图8-46 检测结果
在“检查碰撞(Check Clash)”对话框扩展更新显示的同时,弹出对应冲突列表中被选项的两零部件之间关系的“预览(Preview)”窗口。
图8-47所示为第5项“底座”与“测试块”干涉情况的显示,两部件之间的关系为“碰撞(Clash)”类型,并标示出测试块侵入底座的距离为“29.876mm”,侵入部分的外轮廓突出显示。
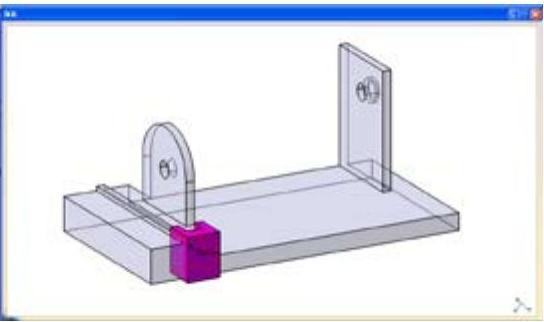
图8-47 底座与测试块的干涉情况
“接触(Contact)”类型的预览窗口如图8-48所示,图a、b分别对应冲突列表的第8项“叉轴.1”与“叉轴.2”,和第11项“叉轴.3”与“十字轴”,接触要素及接触部位以网状线标识。
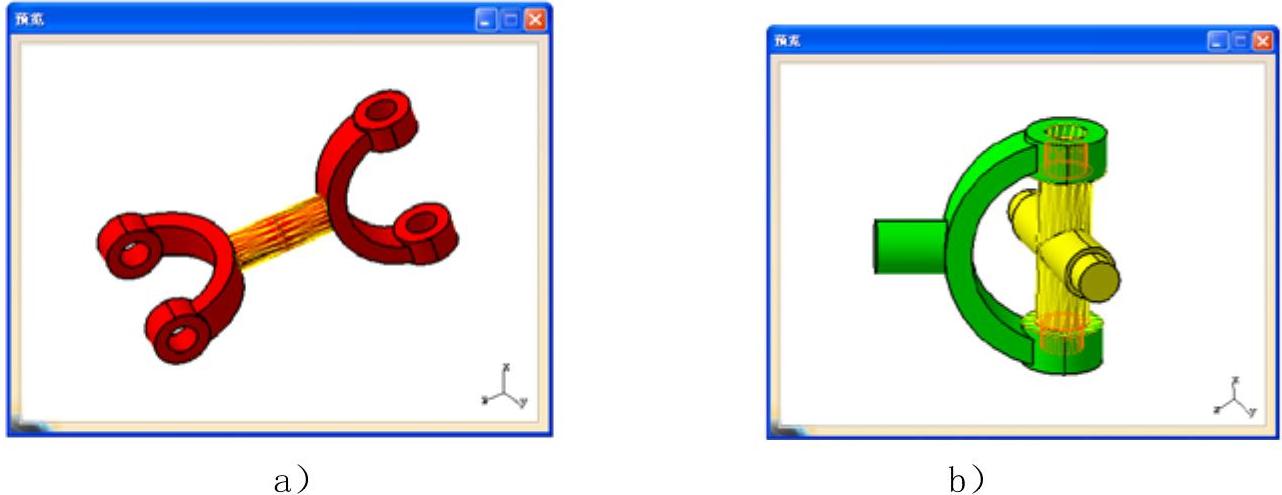
图8-48 接触关系显示
单击“检查碰撞(Check Clash)”对话框的”确定(OK)”按钮,检测结果被保存,结构树上生成“干涉(Interference)”及其下属节点,如图8-49所示。
针对运动机构不同位置的检查可在结构树上生成多个“干涉.*(Interference.*)”记录,查看时只需双击结构树上对应的干涉子节点即可。
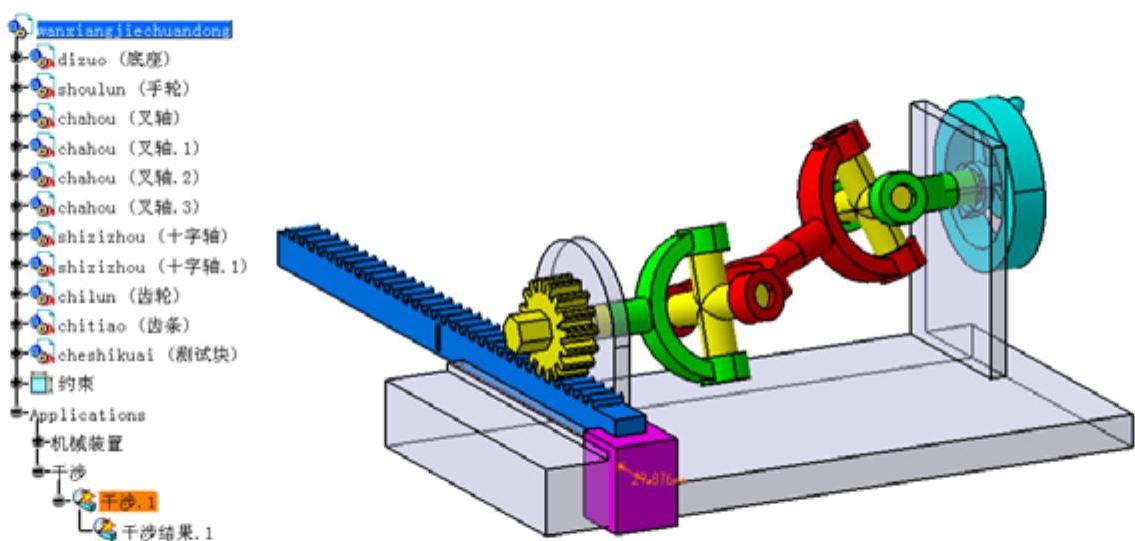
图8-49 结构树上生成干涉节点
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。