



打开随书光盘中的“Exercise\8\8.5.2&7.3.3&7.3.5&7.4.1\Robot.CATProduct”,出现直角坐标机械手(参见图7-34)。该例运动机构结构树上已具有“模拟(Simulation)”节点。
使用“DMU一般动画(DMU Generic Animation)”→“综合模拟(Generic Simula tion)”工具栏中的“编辑模拟(Compile Simulation)”功能图标 ,弹出“编辑模拟(Compile Simulation)”对话框,将该运动机构结构树上的“模拟.1(Simulation.1)”生成“重放(Replay.1)”,如图8-33所示,操作过程参见7.4.1节。
,弹出“编辑模拟(Compile Simulation)”对话框,将该运动机构结构树上的“模拟.1(Simulation.1)”生成“重放(Replay.1)”,如图8-33所示,操作过程参见7.4.1节。
在“DMU一般动画(DMU Generic Animation)”工具栏中单击“扫掠包络体(Swept Volume)”图标 ,显示“扫掠包络体(Swept Volume)”对话框,参见图8-26及相关说明。在对话框的“选择(Selection)”栏内选择“重放.1(Replay.1)”,并将Finger(指夹.1、指夹.2)作为“要扫掠的产品[Product(s)to Sweep]”,“过滤精度(Filtering Precision)”设置为“1mm”,如图8-34所示。
,显示“扫掠包络体(Swept Volume)”对话框,参见图8-26及相关说明。在对话框的“选择(Selection)”栏内选择“重放.1(Replay.1)”,并将Finger(指夹.1、指夹.2)作为“要扫掠的产品[Product(s)to Sweep]”,“过滤精度(Filtering Precision)”设置为“1mm”,如图8-34所示。
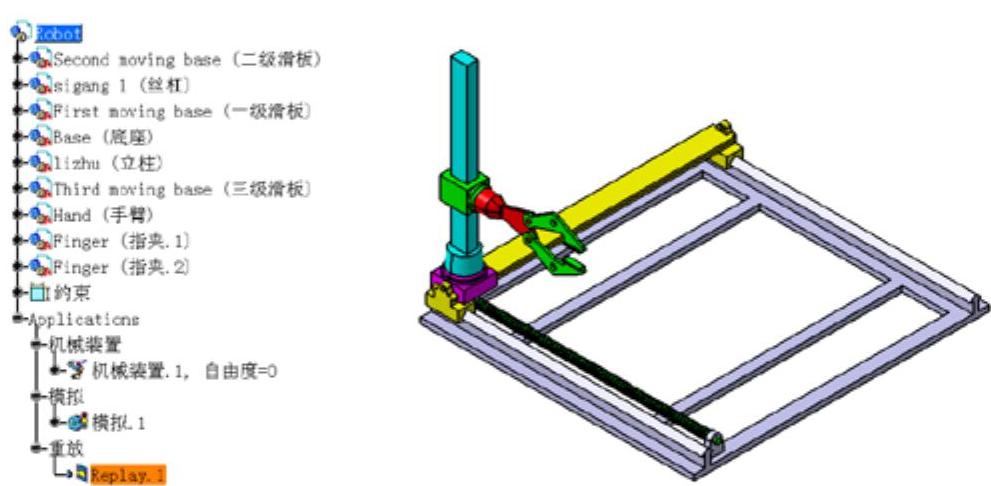
图8-33 结构树上生成重放节点
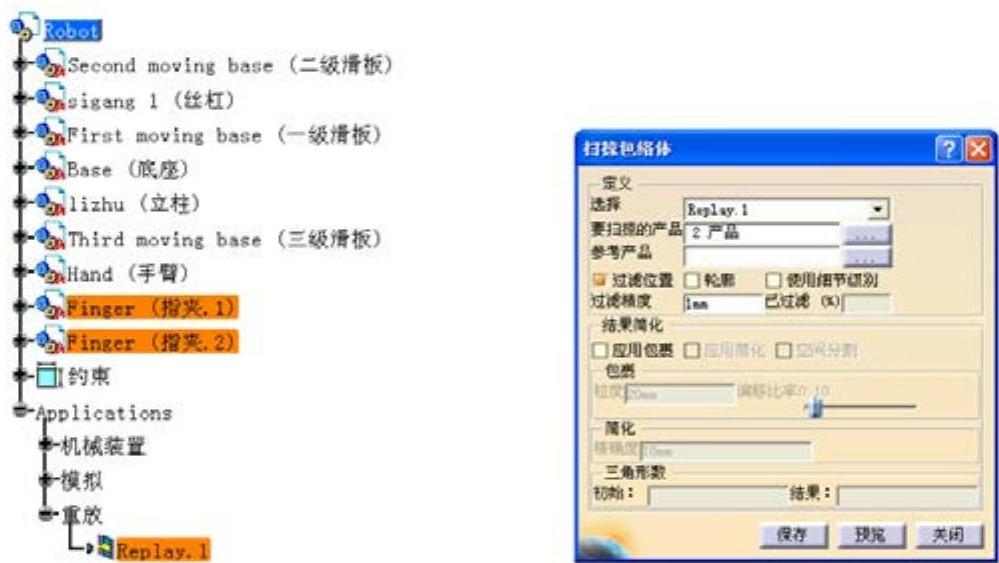
图8-34 扫掠包络体对话框
单击对话框的“预览(Preview)”按钮开始扫掠,进度显示如图8-35所示。由扫掠进度及相关参数可见,基于“重放(Replay)”的扫掠速度远高于直接基于机构运动函数或程序的扫掠。因此,对于复杂的运动机构,建议将运动模拟生成“重放(Replay)”后进行包络体的扫掠或运动轨迹的描绘。
扫掠完成后,结果预览如图8-36所示。(https://www.xing528.com)
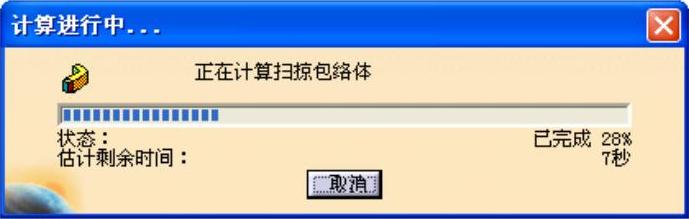
图8-35 扫掠进度显示

图8-36 指夹扫掠包络体
若设置扫掠参数时在“扫掠包络体(Swept Volume)”对话框内选择“结果简化(Result Simplification)”,则生成的扫掠包络体效果如图8-37所示。

图8-37 简化包络体
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。