



(1)合成运动包络体
导入水稻移栽分插机构(Exercise\8\8.4&8.5.1\fenchajigou.CATProduct),在“DMU一般动画(DMU Generic Animation)”工具栏中单击“扫掠包络体(Swept Volume)”图标 ,显示“扫掠包络体(Swept Volume)”对话框,如图8-26所示。基于运动法则的扫掠应将“选择(Selection)”项定位于“机械装置.1(Mechanism.1)”。对话框中默认要扫掠包络体的产品为运动机构中的除固定件外的所有运动零部件,本例为栽植臂等8个零部件,对应结构树上突出显示。
,显示“扫掠包络体(Swept Volume)”对话框,如图8-26所示。基于运动法则的扫掠应将“选择(Selection)”项定位于“机械装置.1(Mechanism.1)”。对话框中默认要扫掠包络体的产品为运动机构中的除固定件外的所有运动零部件,本例为栽植臂等8个零部件,对应结构树上突出显示。

图8-26 扫掠包络体对话框
单击对话框“要扫掠的产品(Product(s)to sweep)”选项栏右侧 按钮,展开“多重选择产品(Product Multiselection)”对话框,如图8-27a所示。
按钮,展开“多重选择产品(Product Multiselection)”对话框,如图8-27a所示。
在对话框内选择前、后栽植臂和组合齿轮1为“要扫掠的产品[Product(s)to Sweep]”。选择过程中,选定情况在结构树及“扫掠包络体(Swept Volume)”对话框中同步更新显示。
选择完成后,单击“确定(OK)”按钮,关闭“多重选择产品(Product Multiselec tion)”对话框。“要扫掠的产品[Product(s)to Sweep]”也可以在结构树上直接用鼠标进行点选。“参考产品(Reference Product)”默认为运动机构的固定件,且不能在结构树上进行选择,扫掠合成运动包络体时不需对其进行操作。其他情况可单击“参考产品(Reference Product)”选项栏右侧的 按钮,展开“选择参考产品(Reference Product Selection)”对话框,根据需要进行选择,如图8-27b所示。
按钮,展开“选择参考产品(Reference Product Selection)”对话框,根据需要进行选择,如图8-27b所示。
在“扫掠包络体(Swept Volume)”对话框内将扫掠“过滤精度(Filter Precision)”修改为“1mm”,如图8-28所示。单击对话框中的“预览(Preview)”按钮,开始扫掠,根据计算机的配置情况,以及要扫掠的产品个数及过滤精度不同,轨迹的绘制需要几分钟不等的时间,进度显示如图8-29所示。
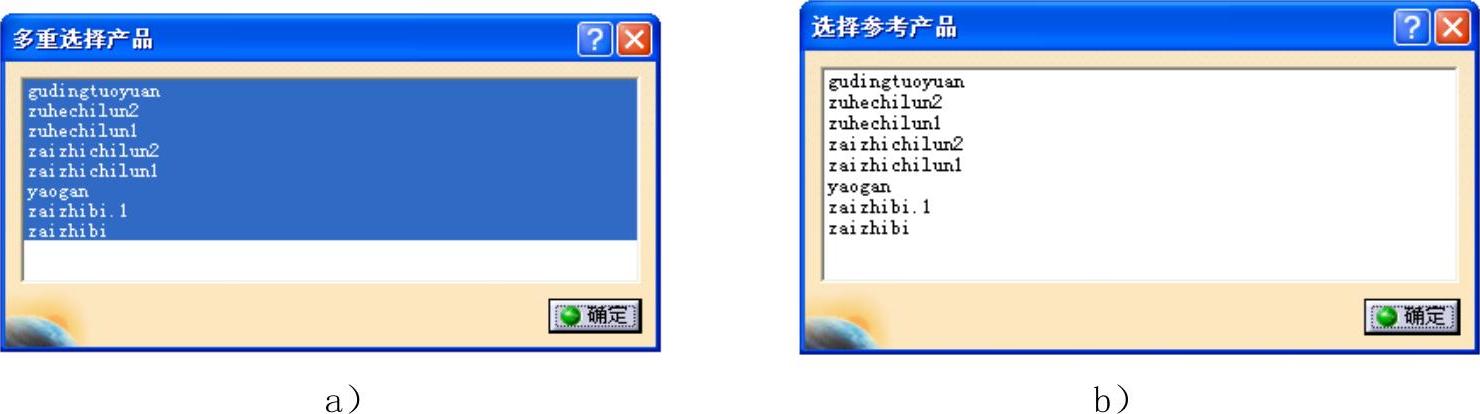
图8-27 扫掠参象与参考体的设置
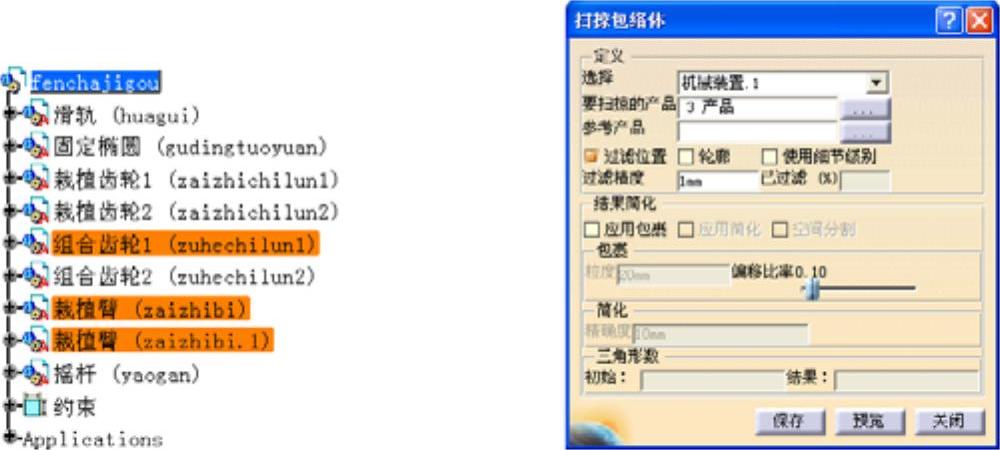
图8-28 选择扫掠体并修改参数
图8-29 扫掠进度显示(https://www.xing528.com)
扫掠完成后,生成的包络体如图8-30所示,图a、b为从正反两个方向观察到的扫掠包络体效果。
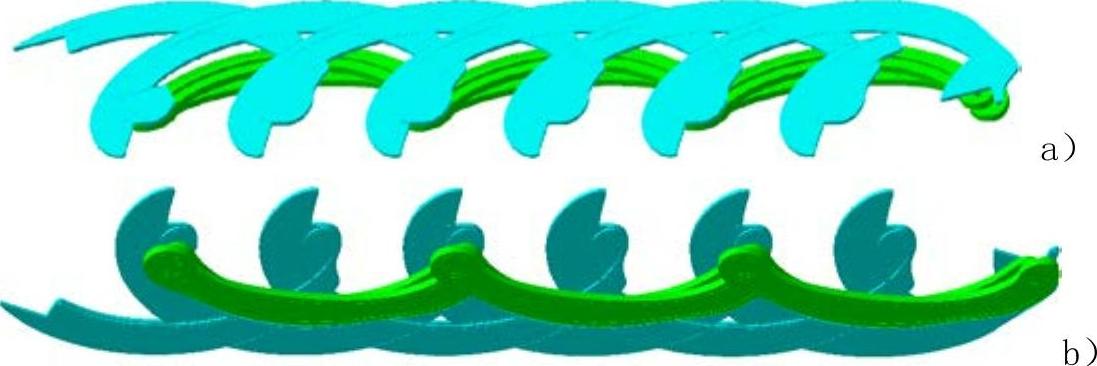
图8-30 合成运动包络体
扫掠包络体可以通过单击对话框的“保存(Save)”按钮,然后选择以“CGR”、“WRL”、“MODEL”或“STL”的形式进行保存。
(2)相对运动包络体
将机构模拟时间调整为“10s”(参见8.4.1节),并展开“扫掠包络体(Swept Volume)”对话框,参见图8-26及相关说明。
选择“栽植臂(zaizhibi.1)”和“组合齿轮2”为“要扫掠的产品[Product(s)to sweep]”,设置“过滤精度(Filter Precision)”为“1mm”。单击对话框“参考产品(Reference Product)”选项栏右侧的 按钮,展开“选择参考产品(Reference Product Selection)”对话框,选择固定椭圆为“参考产品(Reference Product)”,参见图8-27b及相关说明。
按钮,展开“选择参考产品(Reference Product Selection)”对话框,选择固定椭圆为“参考产品(Reference Product)”,参见图8-27b及相关说明。
扫掠参数设置完成后,结构树上待扫掠的零部件突出显示,“扫掠包络体(Swept Volume)”对话框更新显示,如图8-31所示。
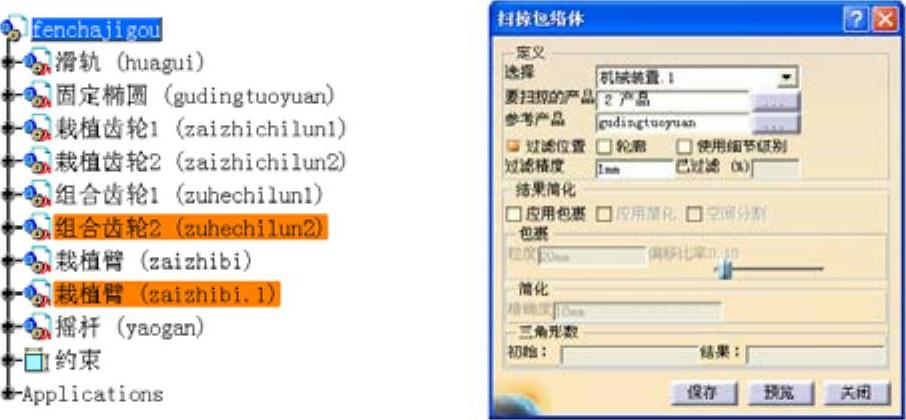
图8-31 扫掠参数设置完成
单击对话框中的“预览(Preview)”按钮,开始扫掠,生成结果如图8-32所示,图a、b分别为从正反两个方向观察到的扫掠体效果。

图8-32 相对运动包络体
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。