



【摘要】:合成运动由两个以上的相对运动组成,如这些运动包含了运动体所有的相对运动并以固定物为参考,则称其为绝对运动。图8-23 栽植臂相对运动轨迹单击“DMU运动机构”→“模拟”工具栏中的“使用法则曲线进行模拟”图标,显示出“运动模拟”对话框。图8-24 选择元素与参考单击“确定”按钮,开始绘制轨迹.该轨迹是栽植臂绕固定椭圆旋转的“肾形”运动轨迹与栽植臂随固定椭圆沿滑轨水平运动轨迹的合成,如图8-25所示。图8-25 栽植臂合成运动轨迹
合成运动由两个以上的相对运动组成,如这些运动包含了运动体所有的相对运动并以固定物为参考,则称其为绝对运动。

图8-23 栽植臂相对运动轨迹
单击“DMU运动机构(DMU Kinematics)”→“模拟(Simulation)”工具栏中的“使用法则曲线进行模拟(Simulation with Laws)”图标 ,显示出“运动模拟(Kinematics Simulation)”对话框。将“模拟时间(Simulation Time Bound)”调整为机构旋转3周所需的时间,则“模拟时间(Simulation Time Bound)=1080°/旋转速度=1080°/(36°/s)=30s”,“步骤数(Number of Steps)”设为“300”,参见图8-7及相关说明。
,显示出“运动模拟(Kinematics Simulation)”对话框。将“模拟时间(Simulation Time Bound)”调整为机构旋转3周所需的时间,则“模拟时间(Simulation Time Bound)=1080°/旋转速度=1080°/(36°/s)=30s”,“步骤数(Number of Steps)”设为“300”,参见图8-7及相关说明。
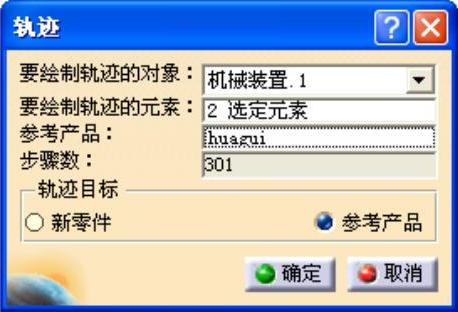
在“DMU一般动画(DMU Generic Animation)”工具栏中单击“轨迹(Trace)”图标 ,显示“轨迹(Trace)”对话框,选中两栽植臂前端标记点作为“要绘制轨迹的元素(Elements to Trace Out)”,并将固定件滑轨选定为“参考产品(Reference Product)”,如图8-24所示。
,显示“轨迹(Trace)”对话框,选中两栽植臂前端标记点作为“要绘制轨迹的元素(Elements to Trace Out)”,并将固定件滑轨选定为“参考产品(Reference Product)”,如图8-24所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-24 选择元素与参考
单击“确定(OK)”按钮,开始绘制轨迹.该轨迹是栽植臂绕固定椭圆旋转的“肾形”运动轨迹与栽植臂随固定椭圆沿滑轨水平运动轨迹的合成,如图8-25所示。其中图a为轨迹生成效果图,图b、c、d、e为栽植臂以滑轨为参考的复合运动过程示意图。轨迹的形状与机构驱动命令运动函数和程序的参数有关。
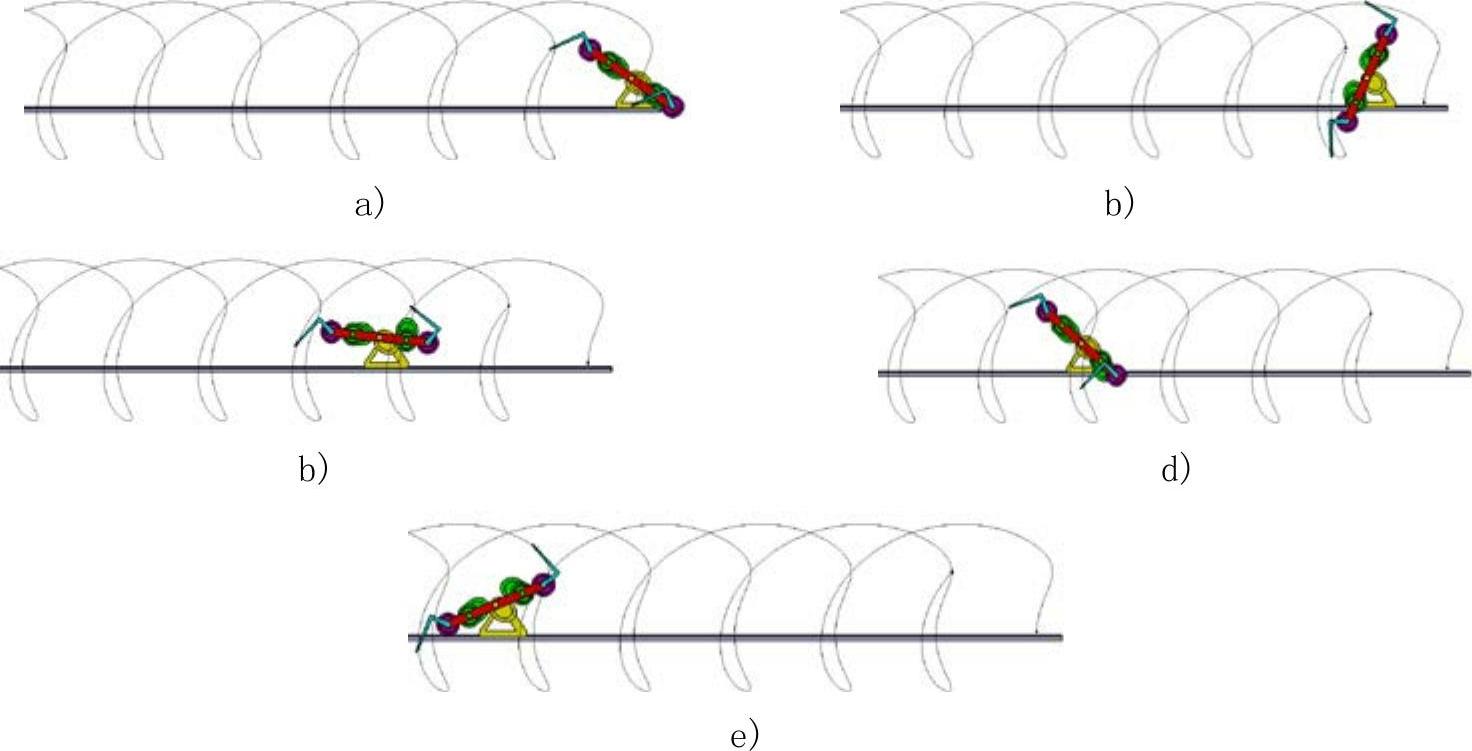
图8-25 栽植臂合成运动轨迹
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。