



导入滚动凸轮机构(Exercise\8\8.1-3&1.4\gundongtulun.CATProduct)。单击“DMU运动机构(DMU Kinematics)”→“模拟(Simulation)”工具栏中“使用法则曲线进行模拟(Simulation with Laws)”图标 ,显示“运动模拟-机械装置.1(Kinematic Simulation-Mechanism.1)”对话框。设置模拟时间为“108s”,“步骤数(Number of Steps)”为“216”,如图8-7所示。
,显示“运动模拟-机械装置.1(Kinematic Simulation-Mechanism.1)”对话框。设置模拟时间为“108s”,“步骤数(Number of Steps)”为“216”,如图8-7所示。
选中“激活传感器(Active Sensors)”复选框,弹出“传感器(Sensors)”对话框,如图8-8所示。选运动副列表中的“旋转.1(Revolute.1)”“棱形.2(Prismatic.2)”“旋转.3(Revolute.3)”,“观察到(Observed)”项状态由“否(No)”变为“是(Yes)”,如图8-9所示。
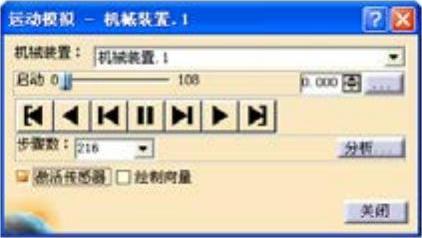
图8-7 运动模拟对话框
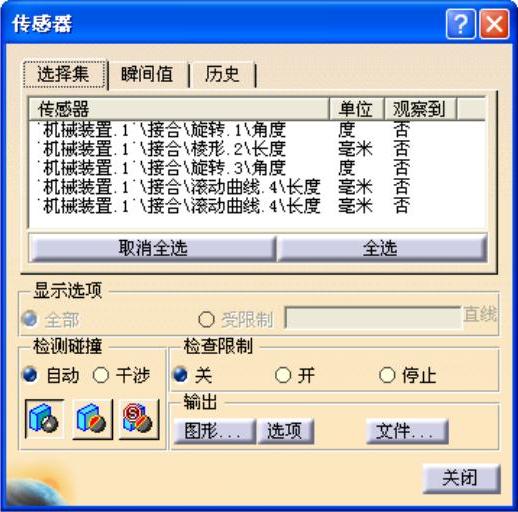
图8-8 传感器对话框
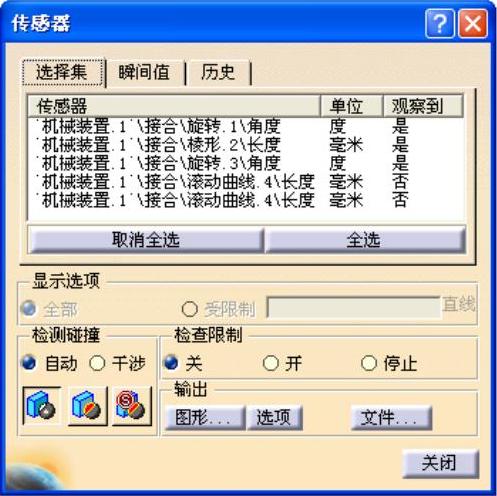
图8-9 选择检测项
通过“运动模拟(Kinematic Simulation)”对话框内的播放器播放机构运动,内置的传动器随即检测各运动副的运动信息,检测采样间隔为“模拟时间(Simulation Time Bound)/步骤数(Number of Steps)=108s/216=0.5s”。播放完成后,单击“传感器(Sensors)”对话框“输出(Outputs)”功能区的“图形(Graphics)”按钮,弹出“传感器图形展示(Sensors Graphical Representation)”窗口,显示以时间为横坐标的被选中运动副的运动规律曲线,如图8-10所示。窗口分两部分,左侧为坐标图,右侧为选中的运动副列表,每组曲线与列表项均以不同的颜色对应标识。(https://www.xing528.com)
运动规律的查看只需在右侧列表内选特定的运动副即可,对应左侧坐标图的纵坐标即变为该运动副的计量单位及标度,图8-10a、b、c所示分别为“旋转.1(Revolute.1)”“棱形.2(Prismatic.2)”和“旋转.3(Revolute.3)”的运动规律。
通过曲线图观察的运动规律也可通过数据的形式显示,或以电子表格的形式输出,以便对运动机构进行精确研究与分析。点选“传感器(Sensors)”对话框上部的“历史(History)”选项,对话框窗口内显示以数字形式记录的运动副运动规律,如图8-11所示。
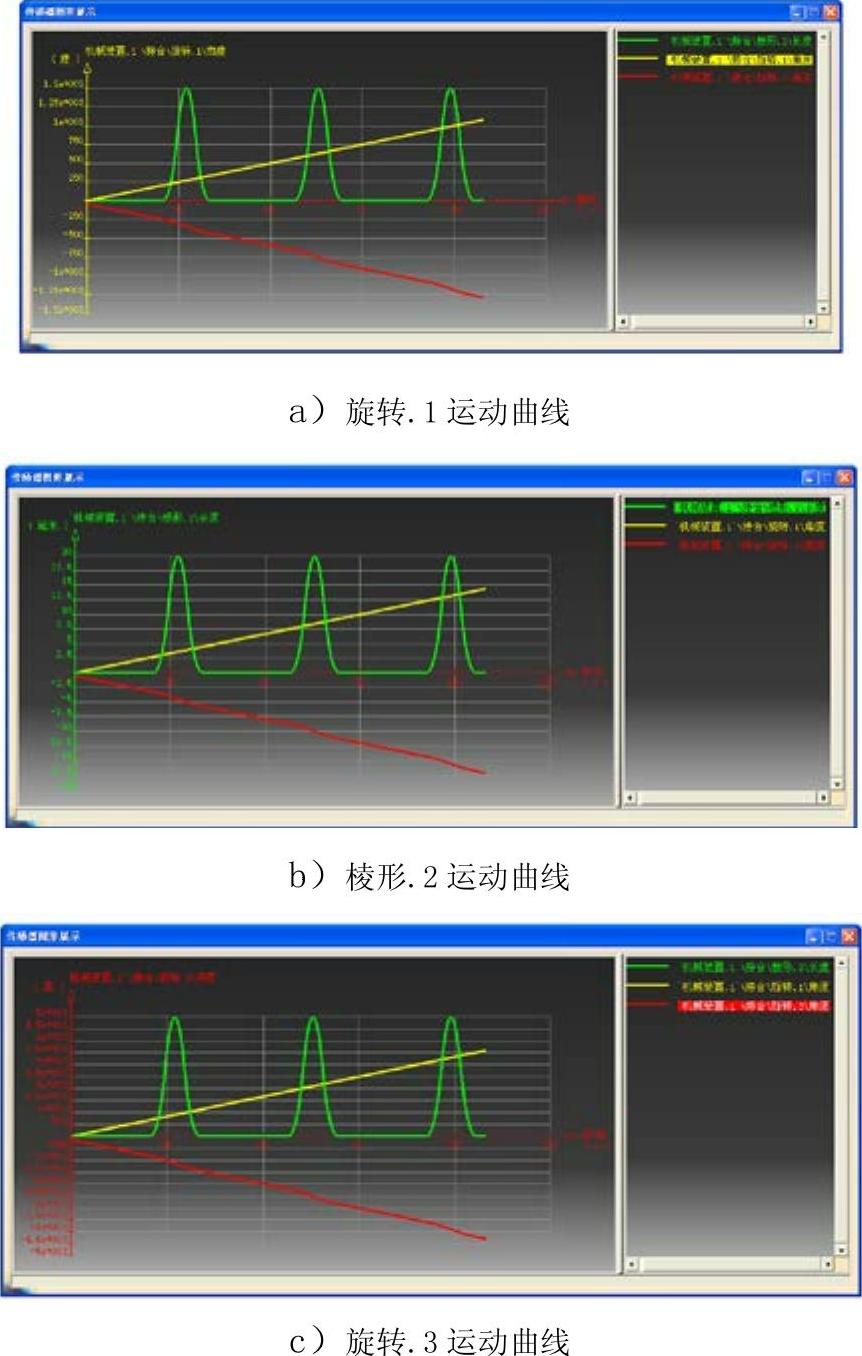
图8-10 运动副运动规律曲线
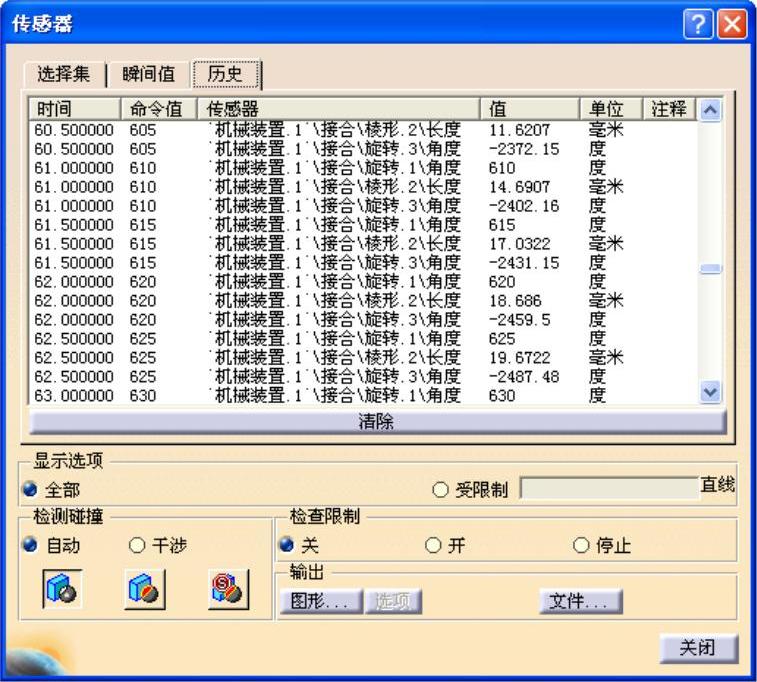
图8-11 数据形式的运动规律记录
该组数字若需记录或导出,可单击“传感器(Sensors)”对话框右下角的“文件(File)”按钮进行保存,参见图8-4及相关说明。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。