



打开随书光盘中的“Exercise\8\8.1-3&1.4\gundongtulun.CATProduct”,出现滚动凸轮机构,如图8-1所示。该例运动机构已建立完成,并编制了运动函数。
运动函数“公式.1(Formula.1)”记录于结构树“法线(Laws)”节点下,该“公式.1(Formula.1)Mechanism.1\Commands\Command.1\Angle=Mechanism.1\KINTime/1s*10deg”规定凸轮每秒钟旋转10°。
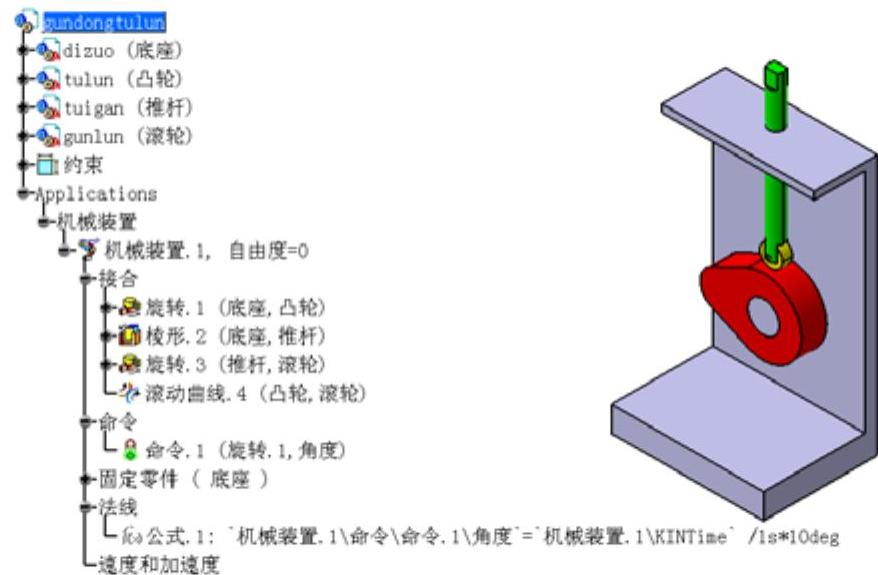
图8-1 具有运动函数的滚动凸轮机构
在“DMU运动机构(DMU Kinematics)”工具栏中单击“分析机械装置(Mechanism Analysis)”图标 ,显示“分析机械装置(Mechanism Analysis)”对话框,如图8-2所示。
,显示“分析机械装置(Mechanism Analysis)”对话框,如图8-2所示。
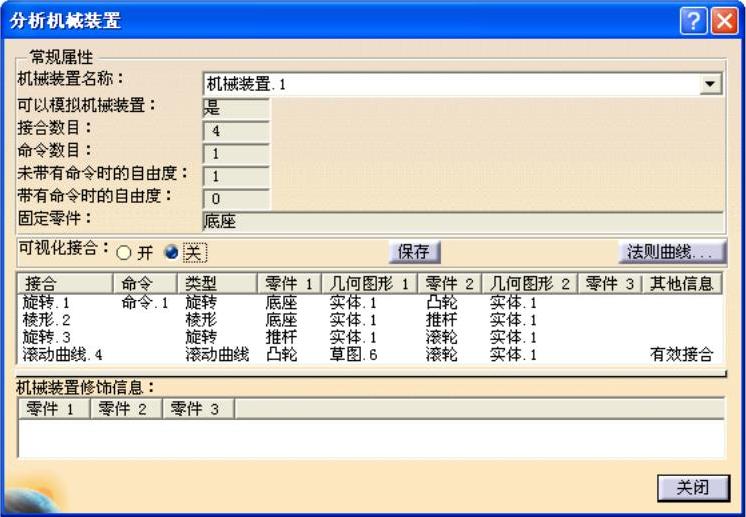
图8-2 分析机械装置对话框
对话框中显示出滚动凸轮装置的运动机构相关信息,包括“接合数目(Number of Joints)”“命令数目(Number of Commands)”“自由度(Degrees of freedom)”“固定零件(Fixed Part)”等总体情况及运动副的名称、类型及涉及的零部件等详细情况。
当在对话框的接合列表中选中任意运动副时,该运动副所涉及的零部件在结构树及3D模型上均以高亮状态显示,便于对运动机构进行检查和分析。以选中“滚动曲线.4(Roll Curve.4)”为例,结构树及3D模型显示情况如图8-3所示。
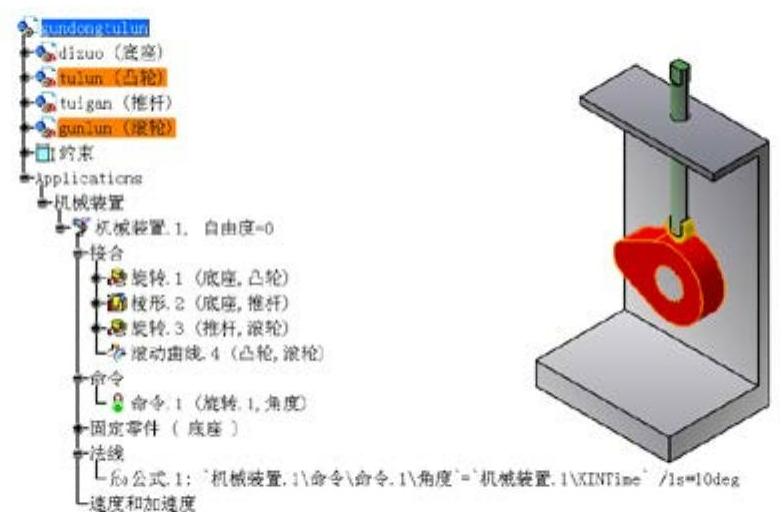
图8-3 运动副突出显示(https://www.xing528.com)
单击“保存(Save)”按钮,可以将“分析机械装置(Mechanism Analysis)”对话框内的信息以电子表格的形式记录下来,如图8-4所示。需要注意的是,一般的CATIA版本仅接受字母或数字形式的文件名。
图8-4 保存运动机构信息
对话框中“可视化接合(Show Joints)”设置默认为“关(Off)”的状态,选“开(On)”后,机构中运动副的运动零部件上会以箭头标示出其运动情况,便于分析与查看复杂运动机构运动副的构成情况,如图8-5所示。
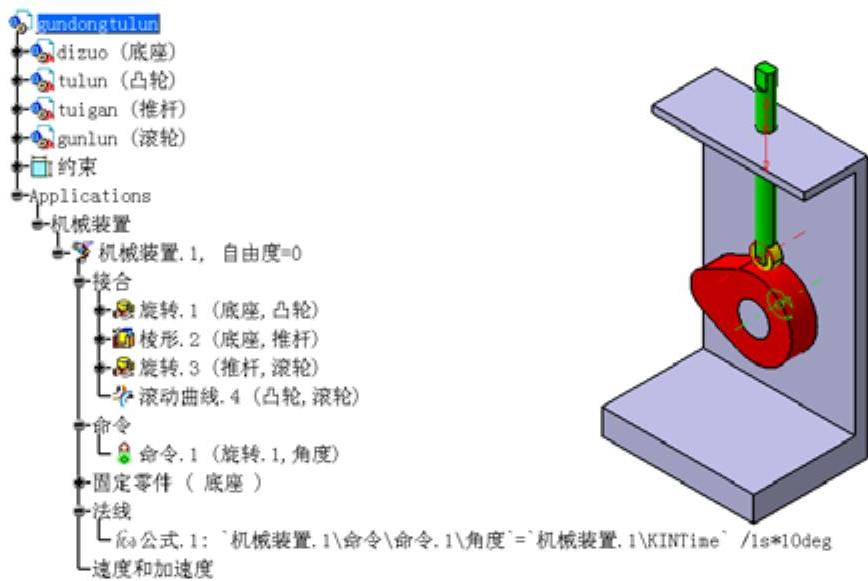
图8-5 可视化接合
单击“分析机械装置(Mechanism Analysis)”对话框中的“法则曲线(Laws)”按钮,可以显示出由运动函数规定的驱动命令以时间为变量的变化规律,如图8-6所示。
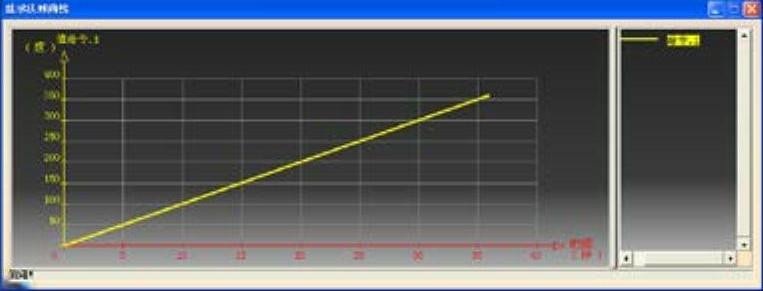
图8-6 驱动命令函数曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。