



打开随书光盘中的“Exercise\7\7.4.2\jilunjigou.CATProduct”,出现棘轮机构模型,该例运动机构已创建完成,如图7-55所示。
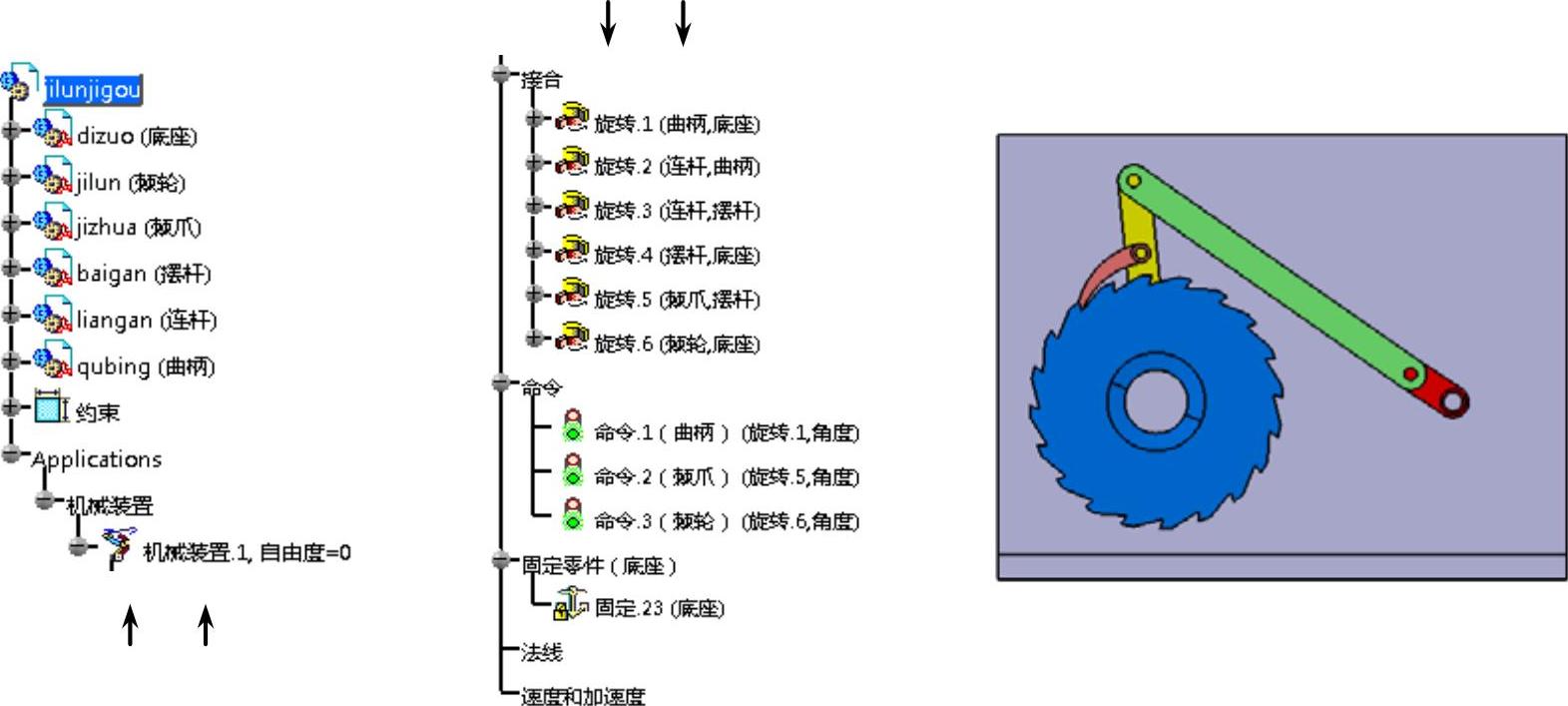
图7-55 棘轮机构模型
(1)仿真形式分析
棘轮机构用于将曲柄的匀速转动通过连杆、摆杆、棘爪的传递转换成棘轮的间歇单向转动。
该机构的工作原理是棘轮的齿形轮廓约束和规定了棘爪对棘轮的作用效果,从而实现棘轮的间歇单向转动。由于复杂的运动过程,无法通过某一形式关联该机构的所有运动副,达到只有曲柄转动一个自由度的理想状态。因此,只能通过单独控制的方式,分别操纵相关联部件的运动,通过时间与速度的拟合实现棘轮机构的运动仿真。
(2)控制参数计算
机构运动时曲柄做匀速转动,本例设定曲柄运动速度为10deg/s,则曲柄转动一周所用时间为36s。
采用CATIA草图约束动画的方法计算控制参数,如图7-56所示,图中虚线圆弧分别为棘爪端点和摆杆、曲柄铰接点的运动轨迹。其中,棘爪端点的运动为棘爪绕其与摆杆铰接点的转动及随该点在摆杆上摆动的合成运动。虚直线表示运动过程中机构的某一位置。
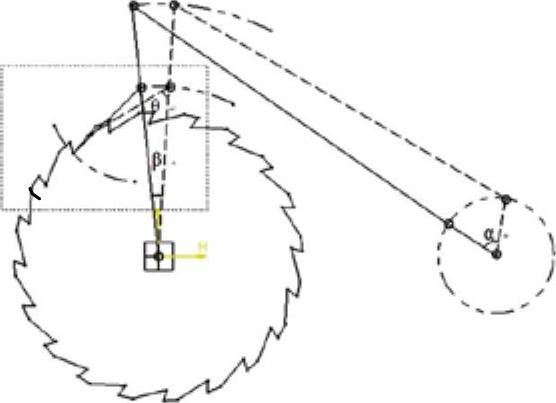
图7-56 CATIA草图动画
选取特征点记录曲柄和棘爪的角度变化值,特征点的选取如图7-57所示。棘爪端点P沿棘轮齿廓从A开始运动经过B滑动至C,掉落至E再滑动至F,棘爪自F反向运动至D推动棘轮走一个齿的位置,即此时D运动到A的位置,完成一次间歇运动。
使P按运动轨迹分别与A、B、C、D、E、F相合,记录该运动过程中曲柄旋转角度的变化和棘爪相对于摆杆的角度变化值,即可获得特征点的控制参数,如表7-3所示。
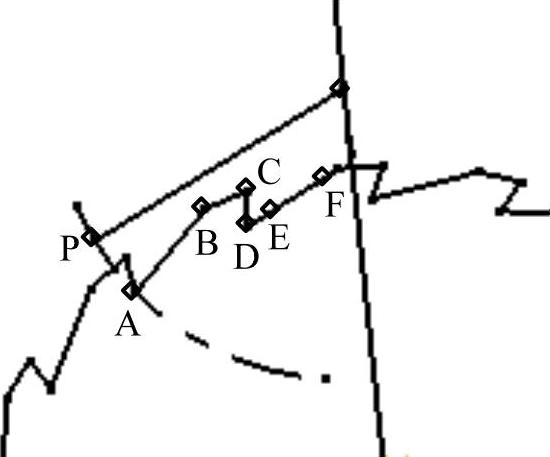
图7-57 特征点
表7-3 棘轮机构特征点控制参数
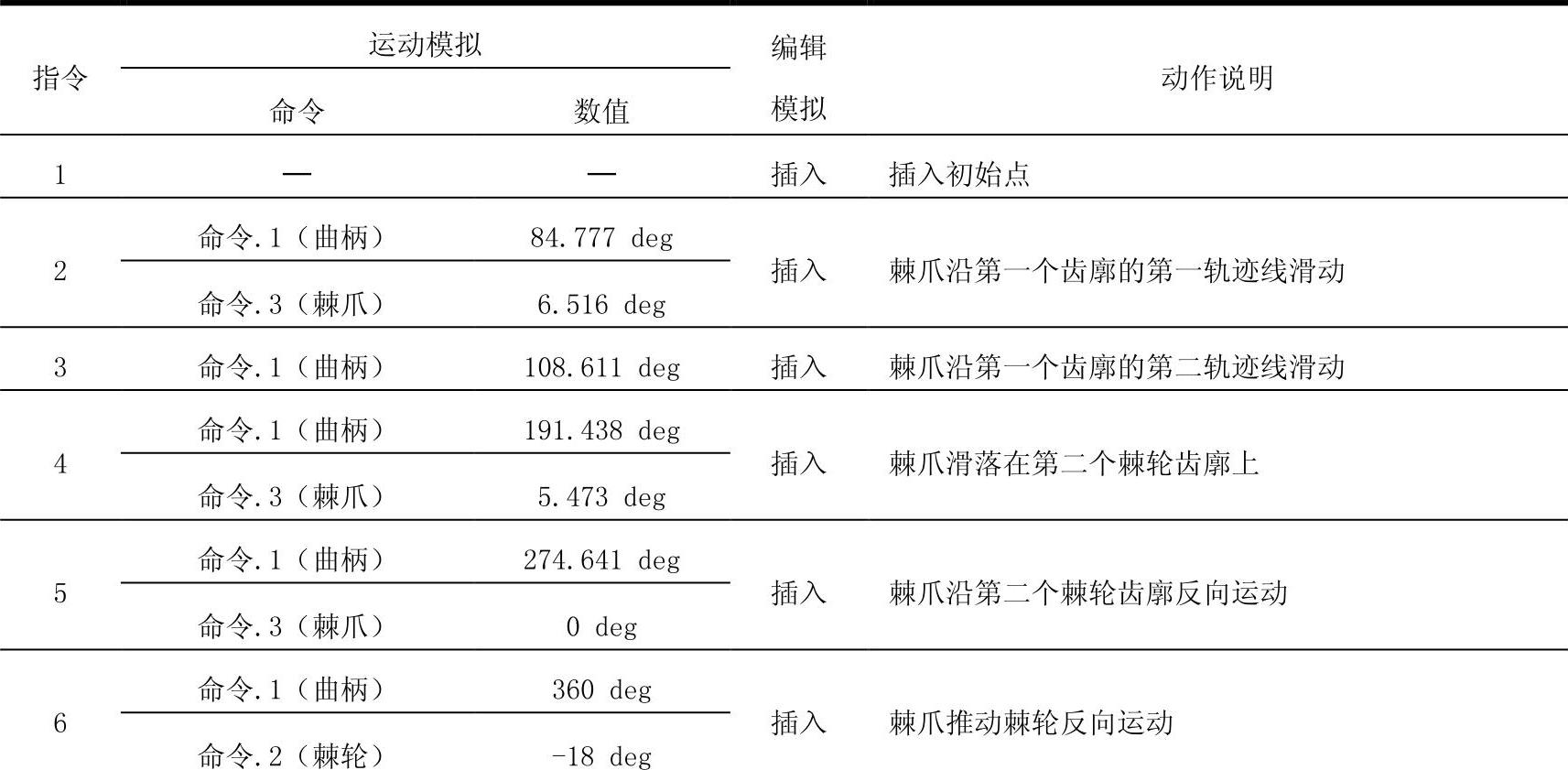
利用表7-3的命令和数值可采用7.4.1节中多驱动手动控制的方法实现棘轮机构的运动。由于曲柄做匀速转动,而棘轮则是间歇和变速的转动,因此以上述有限数量的特征点控制机构运动,会在某一瞬时因运动速度不匹配而出现明显的实体侵入现象,如图7-58所示。
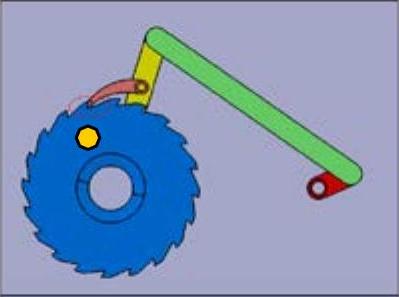
图7-58 棘轮机构干涉现象
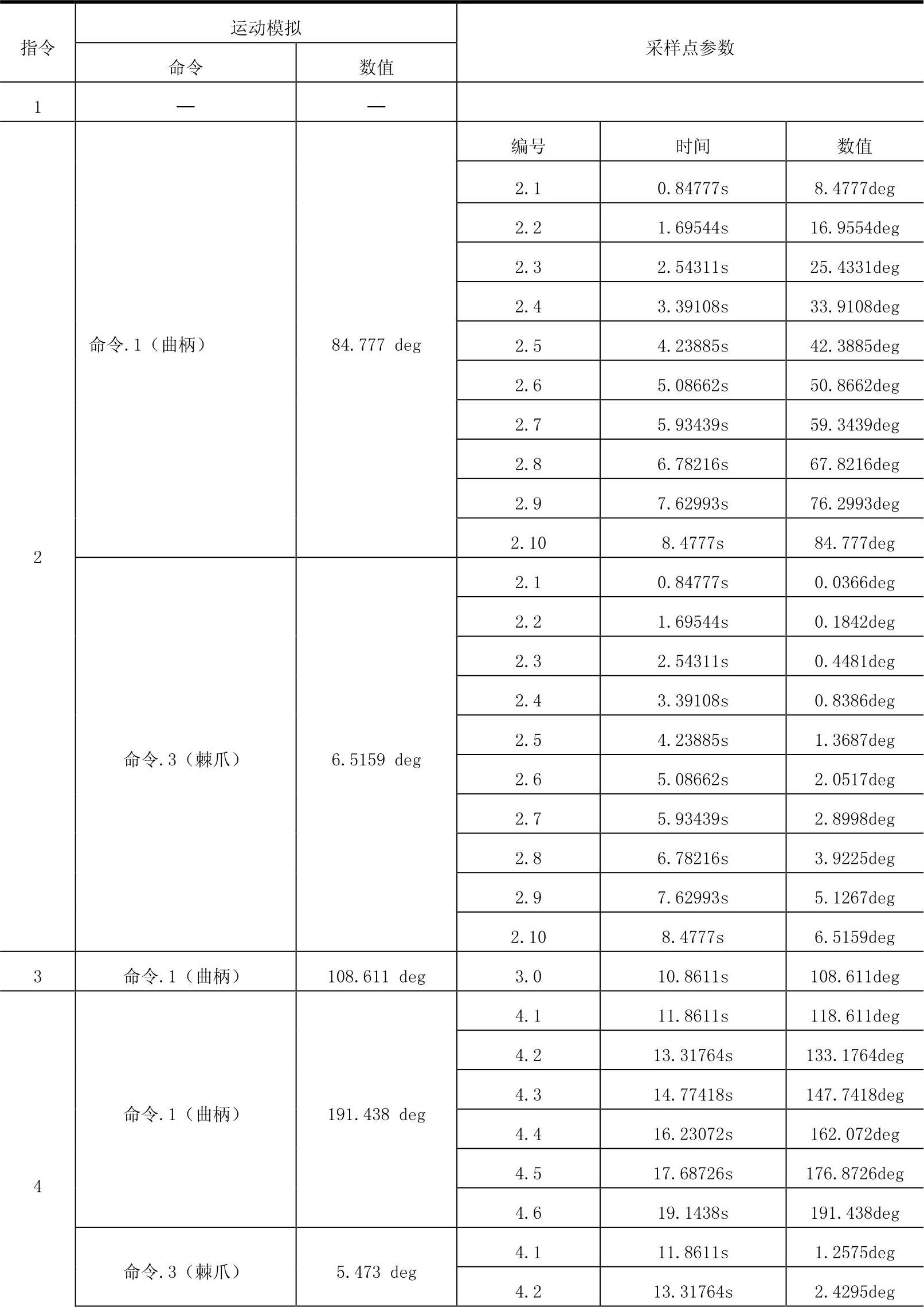
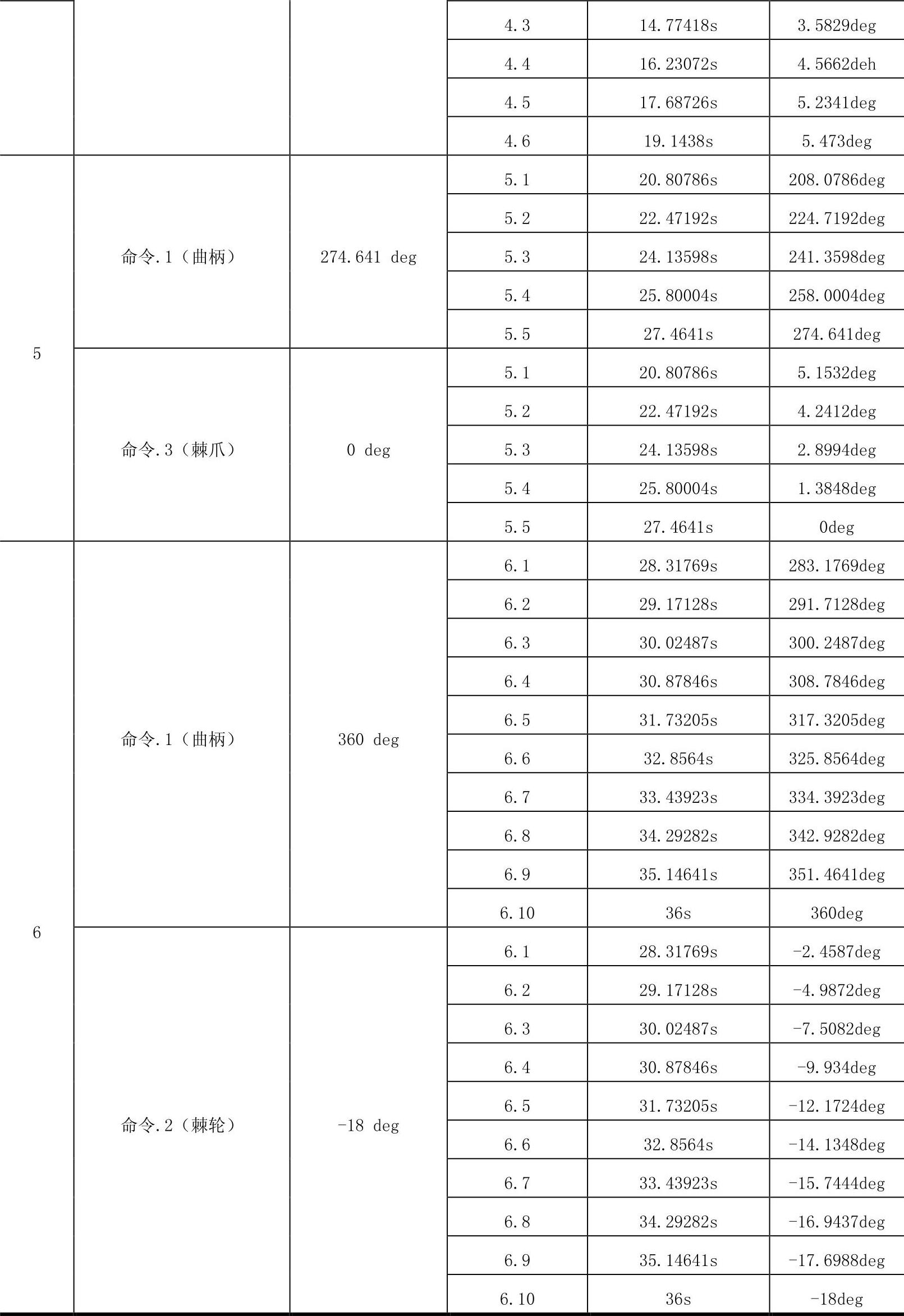
为提高运动的仿真度,在上述特征点区域内增加采样点,各采样点的时间间隔根据设定的曲柄转速计算,细化后的控制指令如表7-4所示。采用细化后的指令制定棘轮的运动规则,可提高运动的仿真度,避免干涉现象。
表7-4 棘轮机构控制指令
(3)程序编制
切换至“开始(Start)”→“知识工程(Knowledgeware)”→“知识顾问(Knowledge Advisor)”工作台。在“活跃参数(Reactive Features)”工具栏中单击“规则(Rule)”图标 ,显示“规则编辑器(Rule Editor)”对话框,如图7-59所示。
,显示“规则编辑器(Rule Editor)”对话框,如图7-59所示。
读者可根据需要对即将编制的运动程序进行标识,本例标识设置如图7-60所示。
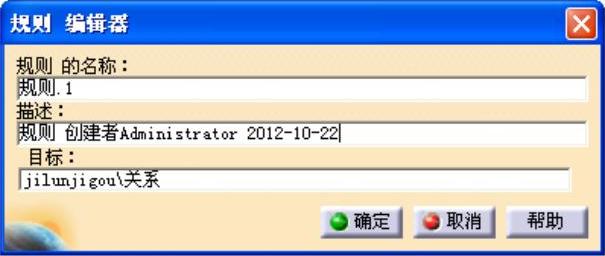
图7-59 规则编辑器
图7-60 设置程序标识
单击“规则编辑器(Rule Editor)”对话框中的“确定(OK)”按钮,对话框更新显示,如图7-61所示。
将光标移至对话框上部编辑栏中“/*规则创建者Sww2012-10-22*/”程序标识段的末尾,按回车键换行。
在新行内输入“if()”,并将“参数的成员(Members of Parameters)”列表中选定“时间(Time)”项,则“全部的成员(Members of All)”列表更新为“时间的成员(Members of Time)”,如图7-62所示。(https://www.xing528.com)
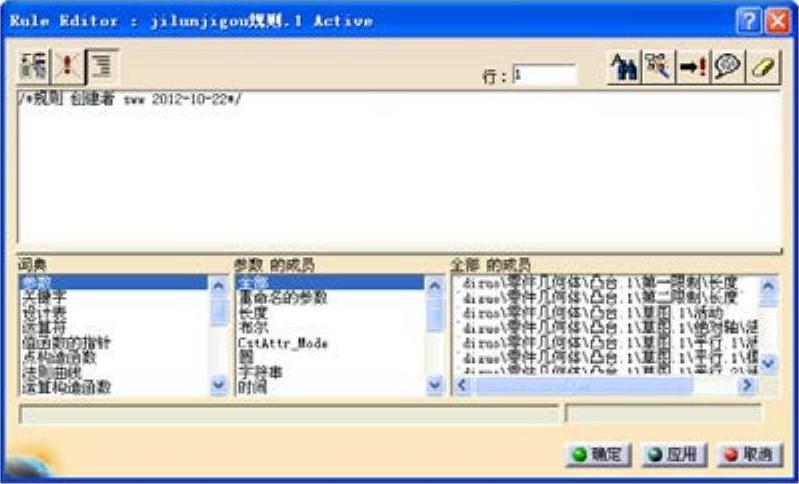
图7-61 规则编辑器对话框更新显示
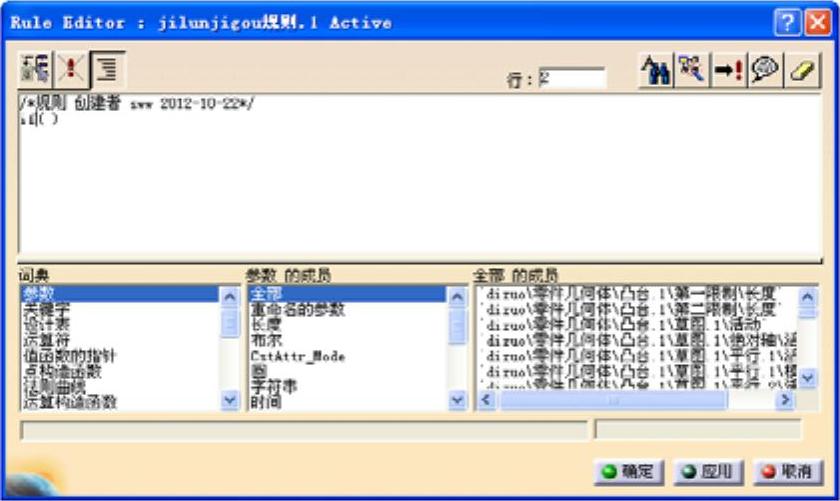
图7-62 显示时间项列表
将光标移至“if()”的括号内,双击“时间的成员(Members of Time)”列表中的“`机械装置.1\KINTime`”,将其作为时间变量装置编进程序语句中,形成“if(`机械装置.1\KINTime`)”的时间判断格式,并编辑一个0.84777秒钟的时间判断语句“if(`机械装置.1\KINTime`>0sand`机械装置.1\KINTime`<=0.84777s)”,如图7-63所示。
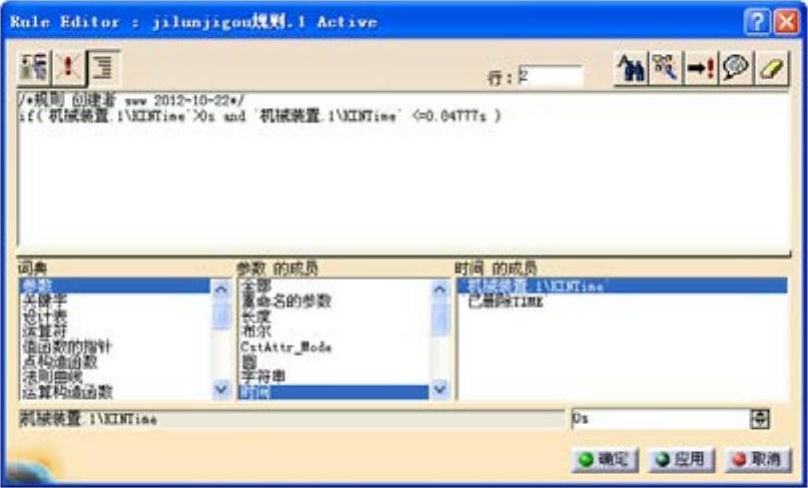
图7-63 编辑时间语句
按回车键换行,在结构树上选中“命令.1(Commands.1)(曲柄)”,“规则编辑器(Rule Editor)”对话框更新显示。“命令.1(Commands.1)(曲柄)”进入“全部的成员(Members of All)”列表。双击列表中的“`机械装置.1\命令\命令.1(曲柄)\角度`”,将其作为函数装载入程序编辑栏,如图7-64所示。
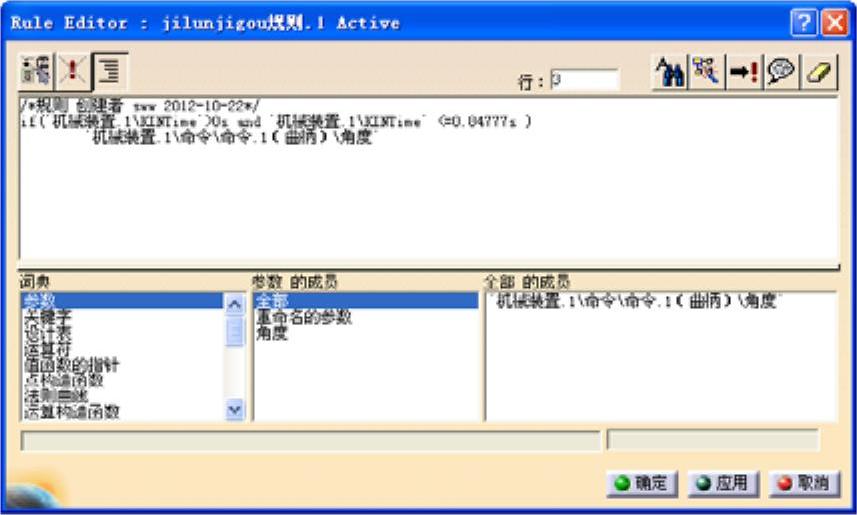
图7-64 装载命令
在编辑栏的“`机械装置.1\命令\命令.1(曲柄)\角度`”后输入“=8.4777deg/0.84777s*”,如图7-65所示。
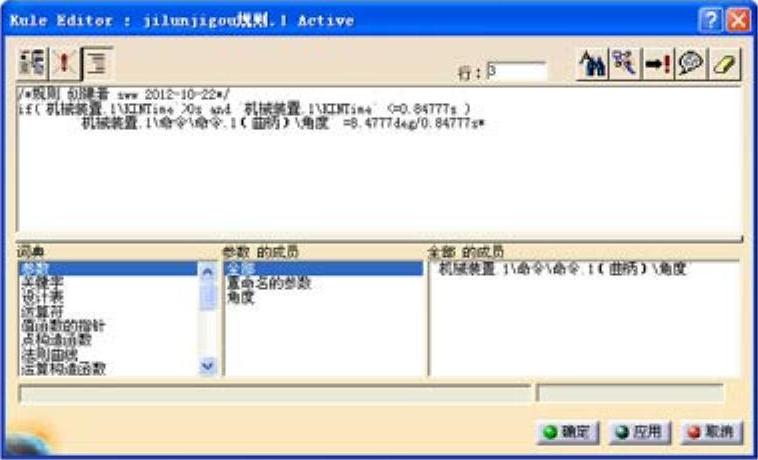
图7-65 输入运动速度
其中,“8.4777deg/0.84777s”表示指令规定“命令.1(Commands.1)(曲柄)”在0.84777s内运动“8.4777deg”,或称运动速度为“10deg/s”。运动速度乘以时间即可构成一个以时间为变量的运动函数语句。
单击结构树上的“机械装置.1(Mechanism.1)”,“规则编辑器(Rule Editor)”对话框更新显示,如图7-65所示。
在对话框“全部的成员(MembersofAll)”列表中双击“`机械装置.1\KINTime`”,将“`机械装置.1\KINTime`”作为时间变量装载入“命令.1(Commands.1)(曲柄)”的程序编辑行,从而完成“`机械装置.1\命令\命令.1(曲柄)\角度`=8.4777deg/0.84777s*`机械装置.1\KINTime`”的运动程序语句,如图7-66所示。
按回车键换行,进行下一段的编辑。为提高程序的编辑速度,可将上一段由“if”引导的时间判断语句复制到新的编辑行,根据控制要求修改时间值。
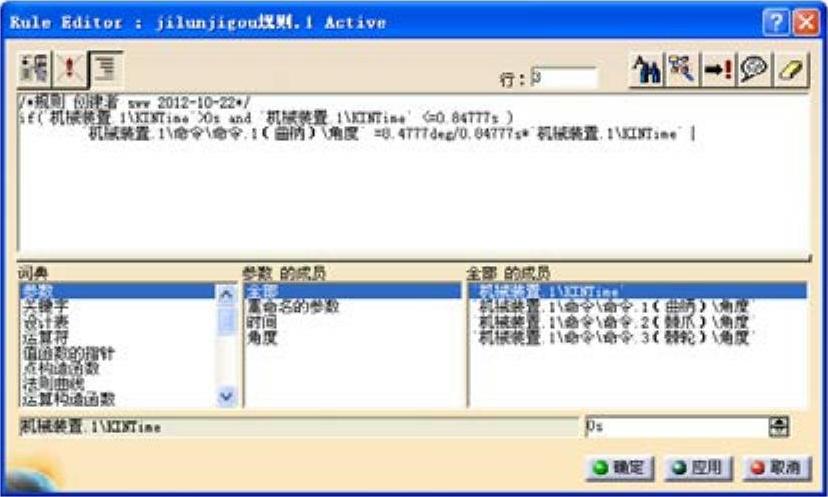
图7-66 完成运动函数语句
运动机构各动作的执行速度由程序的执行语句中设定的时间区间所决定,读者可根据需要自行调整。
按上述步骤,并根据表7-4的指令顺序完成一个间歇运动的动作程序的编辑如下:
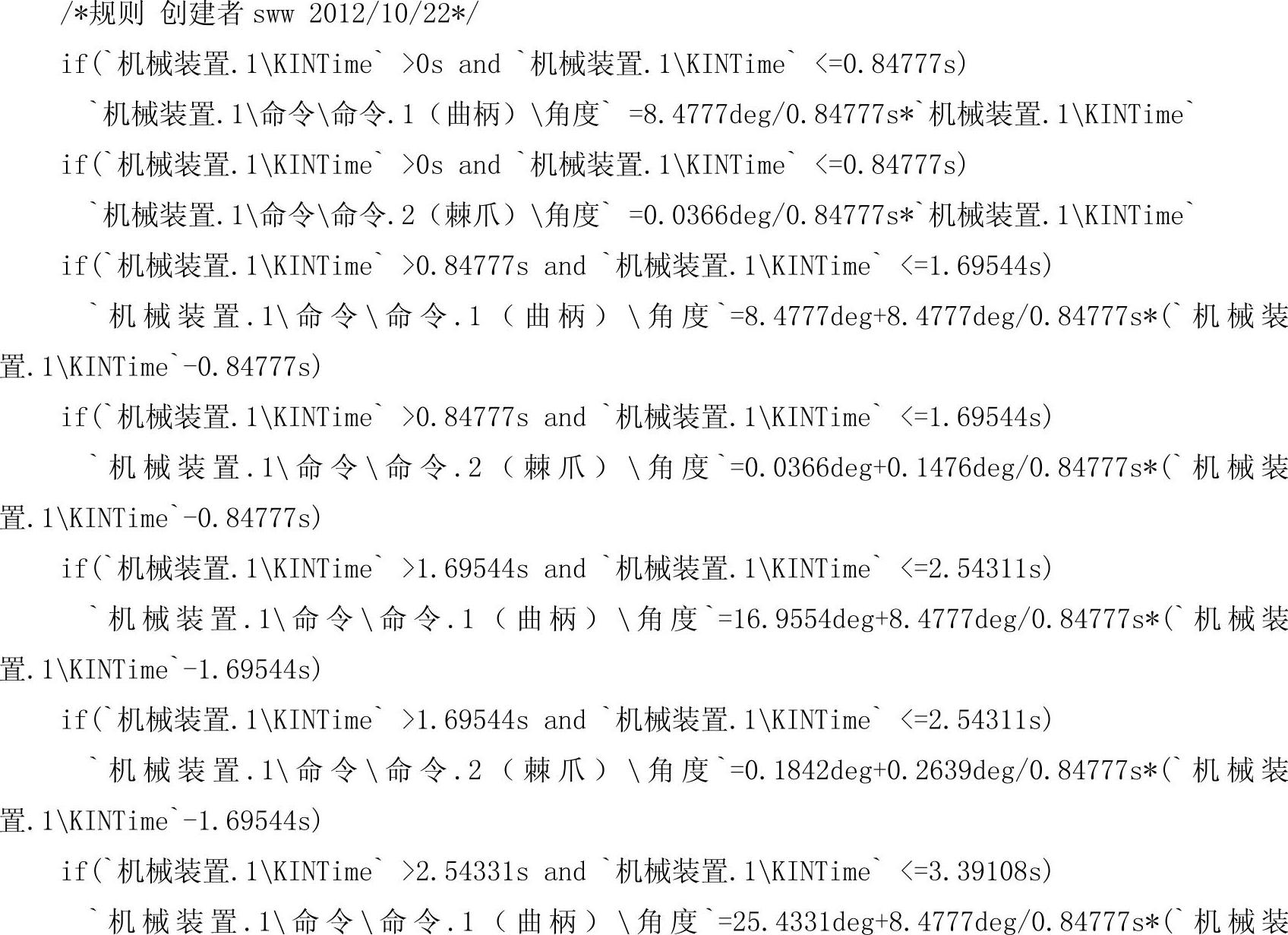
若实现多个连续间歇运动的动作可继续设定相应时间段,具体时间数值见“Example\7\7.4.2\jilunjigou.CATProduct”
动作程序在“规则编辑器(Rule Editor)”对话框的编辑栏编辑完成后,单击“确定(OK)”按钮关闭对话框,结构树的“法线(Laws)”节点下生成“规则.1(Rule.1)”,如图7-67所示。
图7-67 结构树上生成规则
程序对运动机构的控制与运动函数一样,通过“使用法则曲线进行模拟(Simulation with Laws)”的方式进行。
以上模拟只实现了棘轮机构的一个间歇运动过程,可以重复多次编辑上面给出的运动指令来实现多次的间歇运动过程,要注意修改相应的时间段。该棘轮机构的间歇运动也可通过“多驱动手动控制”实现,读者可根据7.3.3节的内容自行尝试。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。