



导入直角坐标机械手运动机构(Exercise\7\7.4.1&7.3.3&7.3.5&8.5.2\Robot.CATPro-duct),参见图7-30。本节讲解用程序控制的方式,使该机构实现表7-1所描述的模拟运动。
(1)关联同步运动
展开直角坐标机械手运动机构结构树上的“命令(Commands)”节点,双击“命令.7(Commands.7)(指夹.2摆动)”,弹出“编辑命令(Command Edition)”对话框,如图7-41所示。

图7-41 编辑命令对话框
在对话框“命令值(Command Value)”显示栏中单击右键,在出现的选择条中选择“编辑公式(Formula Edit)”,弹出“公式编辑器(Formula Editor)”对话框,如图7-42所示。

图7-42 公式编辑器对话框
单击结构树上的“命令.6(Commands.6)(指夹.1摆动)”,对话框“全部的成员(Members of All)”列表更新显示,双击列表中的“`机械装置.1\命令\命令.6(指夹.1摆动)\角度`”,将其载入编辑栏,如图7-43所示。
单击“确定(OK)”回到“编辑命令(Command Edition)”对话框,继续单击“确定(OK)”按钮完成公式编辑。结构树上“法线(Laws)”节点下生成“公式.1:`机械装置.1\命令\命令.7(指夹.2摆动)\角度`=`机械装置.1\命令\命令.6(指夹.1摆动)\角度`”的同步运动关联函数,如图7-44所示。
(2)程序编制
切换至“开始(Start)”→“知识工程(Knowledgeware)”→“知识顾问(Knowledge Advisor)”工作台。在“活跃参数(Reactive Features)”工具栏中单击“规则(Rule)”图标 ,显示“规则编辑器(Rule Editor)”对话框,如图7-45所示。
,显示“规则编辑器(Rule Editor)”对话框,如图7-45所示。

图7-43 装载参数

图7-44 结构树上的同步关联函数
读者可根据需要对即将编制的运动程序进行标识,本例标识设置如图7-46所示。

图7-45 规则编辑器对话框

图7-46 设置程序标识
单击“规则编辑器(Rule Editor)”对话框中的“确定(OK)”按钮,对话框更新显示,如图7-47所示。
将光标移至对话框上部编辑栏中“/*规则创建者Lcc2011-5-5*/”程序标识段的末尾,按回车键换行。
在新行内输入“if()”,并将“参数的成员(Membersof Parameters)”列表中选定“时间(Time)”项,则“全部的成员(Members of All)”列表更新为“时间的成员(Members of Time)”,如图7-48所示。

图7-47 规则编辑器对话框更新显示(https://www.xing528.com)

图7-48 显示时间项列表
将光标移至“if()”的括号内,双击“时间的成员(Members of Time)”列表中的“`机械装置.1\KINTime`”,将其作为时间变量装置进程序语句中,形成“if(`机械装置.1\KINTime`)”的时间判断格式,并编辑一个5秒钟的时间判断语句“if(`机械装置.1\KINTime`>0sand`机械装置.1\KINTime`<=5s)”,如图7-49所示。
按回车键换行,在结构树上选中“命令.1(Commands.1)(z轴)”,“规则编辑器(Rule Editor)”对话框更新显示。“命令.1(Commands.1)(z轴)”进入“全部的成员(Members of All)”列表。双击列表中的“`机械装置.1\命令\命令.1(z轴)\长度`”,将其作为函数装载入程序编辑栏,如图7-50所示。

图7-49 编辑时间语句
在编辑栏的“`机械装置.1\命令\命令.1(z轴)\长度`”后输入“=300mm/5s*”,如图7-51所示。其中,“300mm/5s”表示指令规定“命令.1(Commands.1)(z轴)”在5s内运动“300mm”,或称运动速度为“60mm/s”。运动速度乘以时间即可构成一个以时间为变量的运动函数语句。
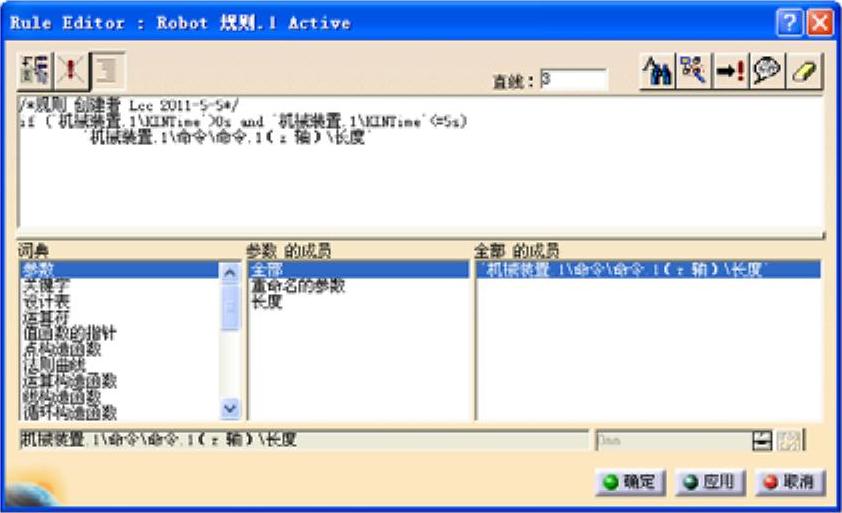
图7-50 装载命令

图7-51 输入运动速度
单击结构树上的“机械装置.1(Mechanism.1)”,“规则编辑器(Rule Editor)”对话框更新显示,如图7-51所示。
在对话框“全部的成员(Members of All)”列表中双击“`机械装置.1\KINTime`”,将“`机械装置.1\KINTime`”作为时间变量装载入“命令.1(Commands.1)(z轴)”的程序编辑行,从而完成“`机械装置.1\命令\命令.1(z轴)\长度`=300mm/5s*`机械装置.1\KINTime`”的运动程序语句,如图7-52所示。

图7-52 完成运动函数语句
按回车键换行,进行下一段的编辑。为提高程序的编辑速度,可将上一段由“if”引导的时间判断语句复制到新的编辑行,根据控制要求修改时间值。本例设定下一个控制指令时间区间为“10s”,则将由“if”引导的时间判断语句修改“if(`机械装置.1\KINTime`>5sand`机械装置.1\KINTime`<=15s)”。同时,编辑该时间区间的执行语句为“`机械装置.1\命令\命令.2(x轴)\长度`=600mm/10s*(`机械装置.1\KINTime`-5s)”,如图7-53所示。
运动机构各动作的执行速度由程序的执行语句中设定的时间区间所决定,读者可根据需要自行调整。

图7-53 完成第二个功能语句段
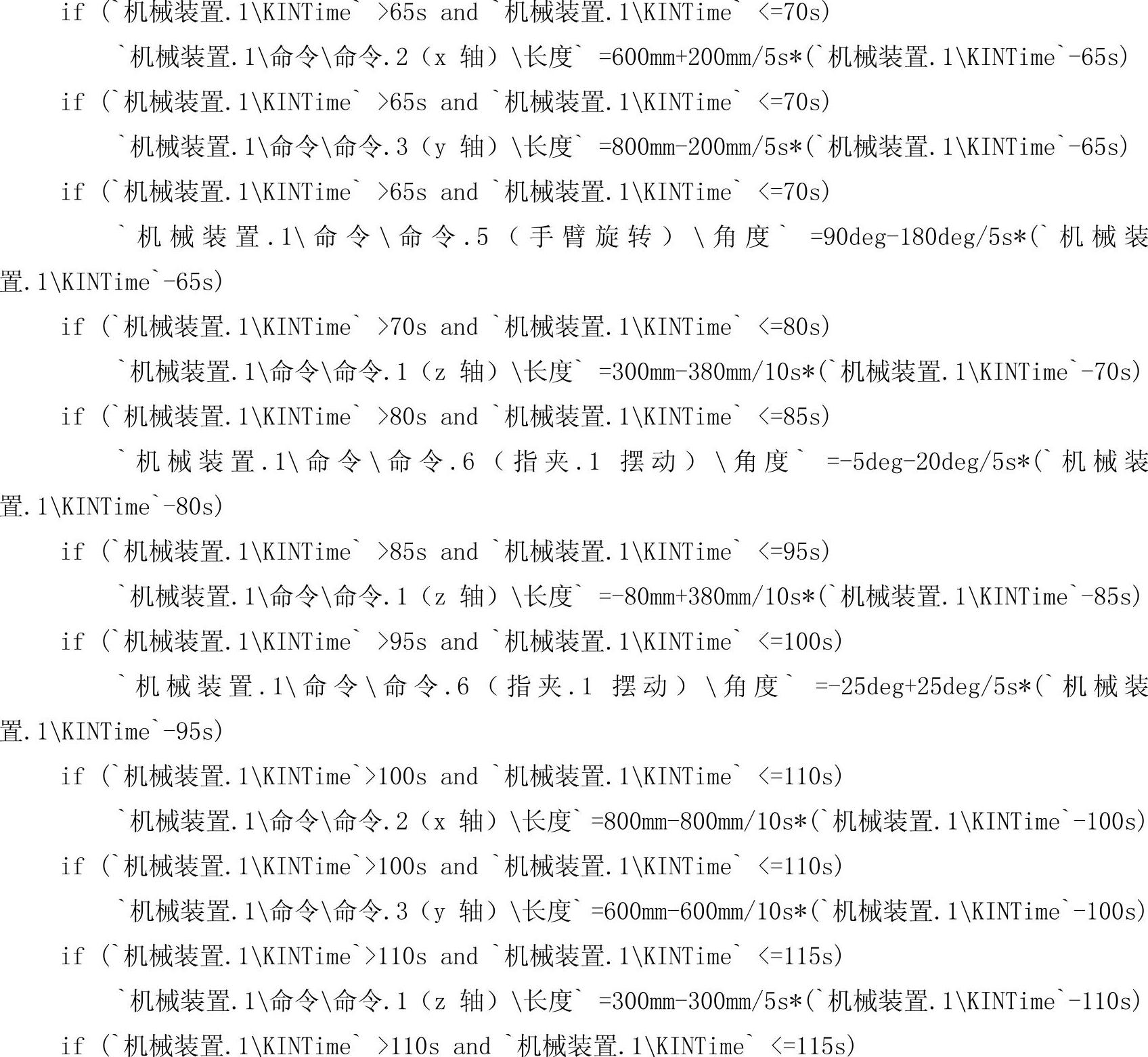
按上述步骤,并根据表7-1的指令顺序完成全部动作程序的编辑如下:


 动作程序在“规则编辑器(Rule Editor)”对话框的编辑栏编辑完成后,单击“确定(OK)”按钮关闭对话框,结构树的“法线(Laws)”节点下生成“规则.1(Rule.1)”,如图7-54所示。程序对运动机构的控制与运动函数一样,通过“使用法则曲线进行模拟(Simulation with Laws)”的方式进行。
动作程序在“规则编辑器(Rule Editor)”对话框的编辑栏编辑完成后,单击“确定(OK)”按钮关闭对话框,结构树的“法线(Laws)”节点下生成“规则.1(Rule.1)”,如图7-54所示。程序对运动机构的控制与运动函数一样,通过“使用法则曲线进行模拟(Simulation with Laws)”的方式进行。

图7-54 结构树上生成规则
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。