



打开随书光盘中的“Exercise\7\7.1-2&8.6.1\wanxiangjiechuandong.CATP roduct”,出现十字轴万向节传动机构,如图7-1所示。该例运动机构已建立完成。
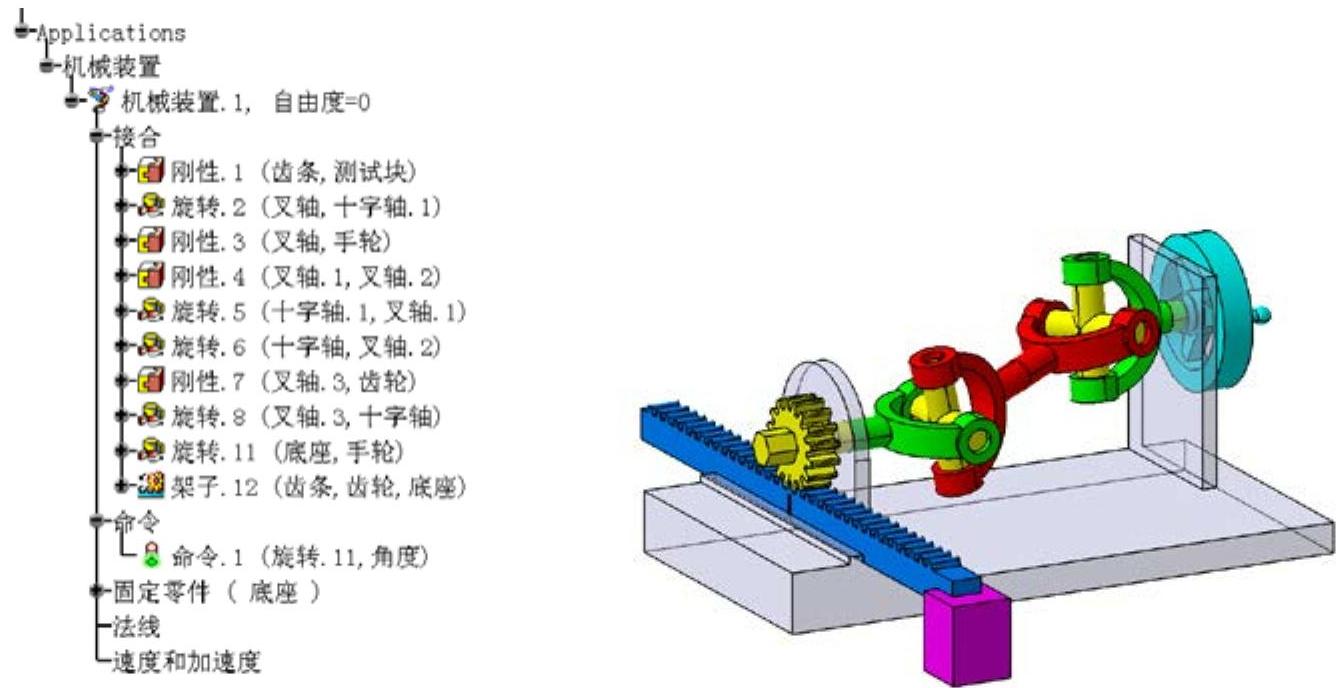
图7-1 十字轴万向节传动机构
在“DMU运动机构(DMU Kinematics)”→“模拟(Simulation)”工具栏中单击“使用命令进行模拟(Simulation with Commands)”图标 ,显示“运动模拟-机械装置.1(Kinematic Simulation-Mechanism.1)”对话框,如图7-2所示。对于具有多个“机械装置.*(Mechanism.*)”的数字样机,可以在对话框“机械装置(Mechanism)”选项栏的右侧按黑色小三角形
,显示“运动模拟-机械装置.1(Kinematic Simulation-Mechanism.1)”对话框,如图7-2所示。对于具有多个“机械装置.*(Mechanism.*)”的数字样机,可以在对话框“机械装置(Mechanism)”选项栏的右侧按黑色小三角形 ,下展开所有可模拟的“机械装置.*(Mechanism.*)”并根据需要进行选择。单击对话框右侧的
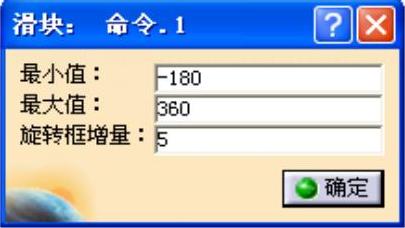
,下展开所有可模拟的“机械装置.*(Mechanism.*)”并根据需要进行选择。单击对话框右侧的 按钮,弹出滚动条拉动范围调整“滑块:命令.1(Slider:Command.1)”对话框,如图7-3所示,用户可根据需要修改数据。
按钮,弹出滚动条拉动范围调整“滑块:命令.1(Slider:Command.1)”对话框,如图7-3所示,用户可根据需要修改数据。
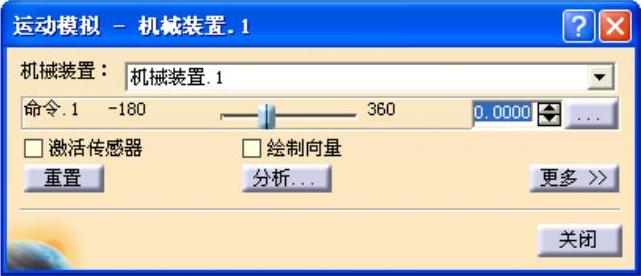
图7-2 运动模拟对话框
 (https://www.xing528.com)
(https://www.xing528.com)
图7-3 运动范围调整对话框
拖动“运动模拟-机械装置.1(Kinematic Simulation-Mechanism.1)”对话框中的滚动条,可以观察到万向节传动机构的运动情况,如图7-4所示。机构也可以通过命令参数显示窗口右侧的上、下箭头实现步进运动,或直接在窗口内输入角度数值,按回车键执行。采用直接输入数值的方式能够精确控制机构的运动位置。
“使用命令进行模拟(Simulation with Commands)”一般用于运动机构建立完成后对运动情况的基本测试,不适于作进一步的运动分析。单击对话框内的“重置(Reset)”按钮,机构回到本次模拟之前的位置。停止模拟并关闭对话框后,机构保持在滚动条控制的对应位置。
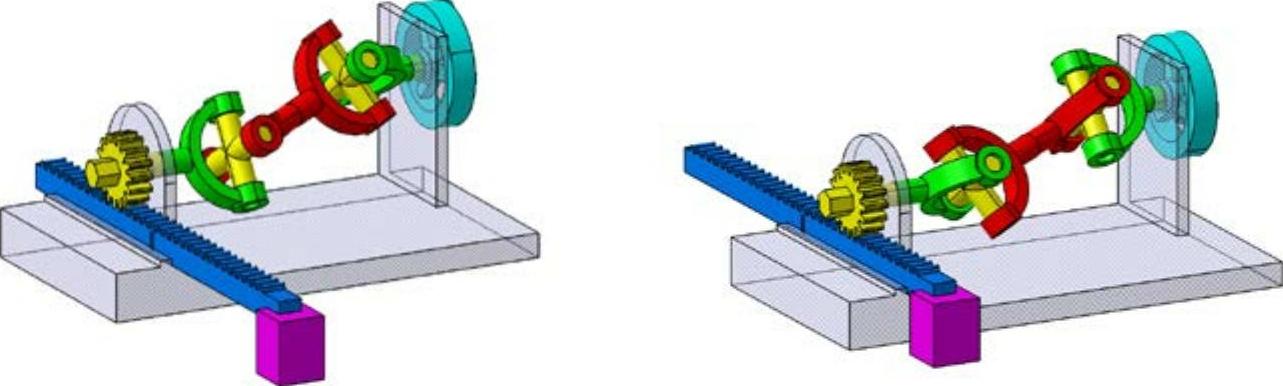
图7-4 机构的运动情况
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。