



打开随书光盘中的“Exercise\6\6.6\qingxingdipan.CATProduct”,导入轻型自走底盘全部组件(参见图6-46)。
(1)发动机
发动机组件如图6-47所示,运动副创建完成后的结构树如图6-48所示。

图6-47 发动机组件

图6-48 发动机运动模拟机构
(2)变速箱
变速箱组件如图6-49所示,运动副创建完成后的结构树如图6-50所示。发动机运动副创建完成后,要创建曲轴与输入轴的“U形接合(U Joint)”,以将曲轴和输入轴关联起来,使曲轴和输入轴以相同的角速度运动。
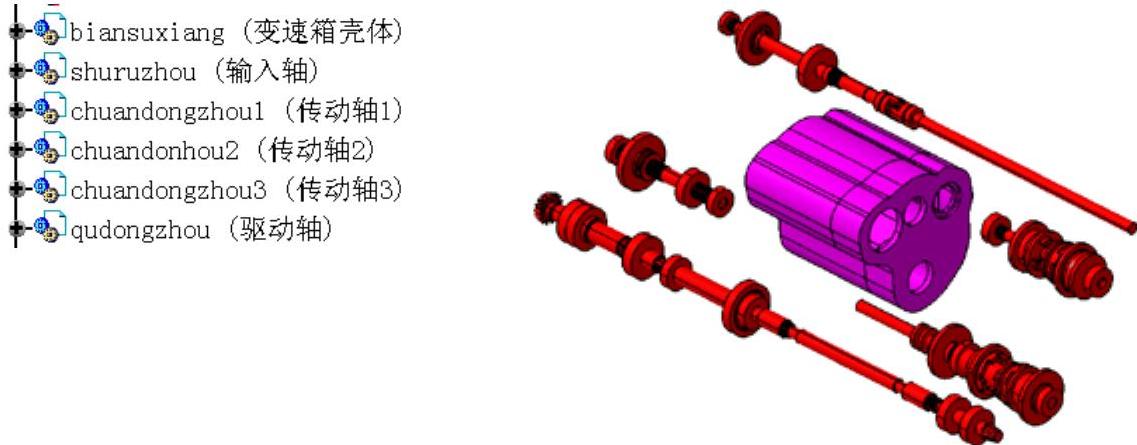
图6-49 变速箱组件
(3)前桥
前桥组件如图6-51所示,运动副创建完成的结构树如图6-52所示。前桥运动副中立轴与前桥半轴、立轴与前轮的接合方式均为“滚动曲线(Roll Curve)”运动副,若采用“齿轮接合(Gear Joint)”,将会导致无法转向。

图6-50 变速箱运动副结构树
(4)转向机构
转向机构组件如图6-53所示,运动副创建完成后的结构树如图6-54所示。转向机构运动副中,一般容易忽略转向齿条与两个转向拉杆之间的“U形接合(U Joint)”。如果没有创建“U形接合(U Joint)”,将无法实现预定的运动。(https://www.xing528.com)

图6-51 前桥组件
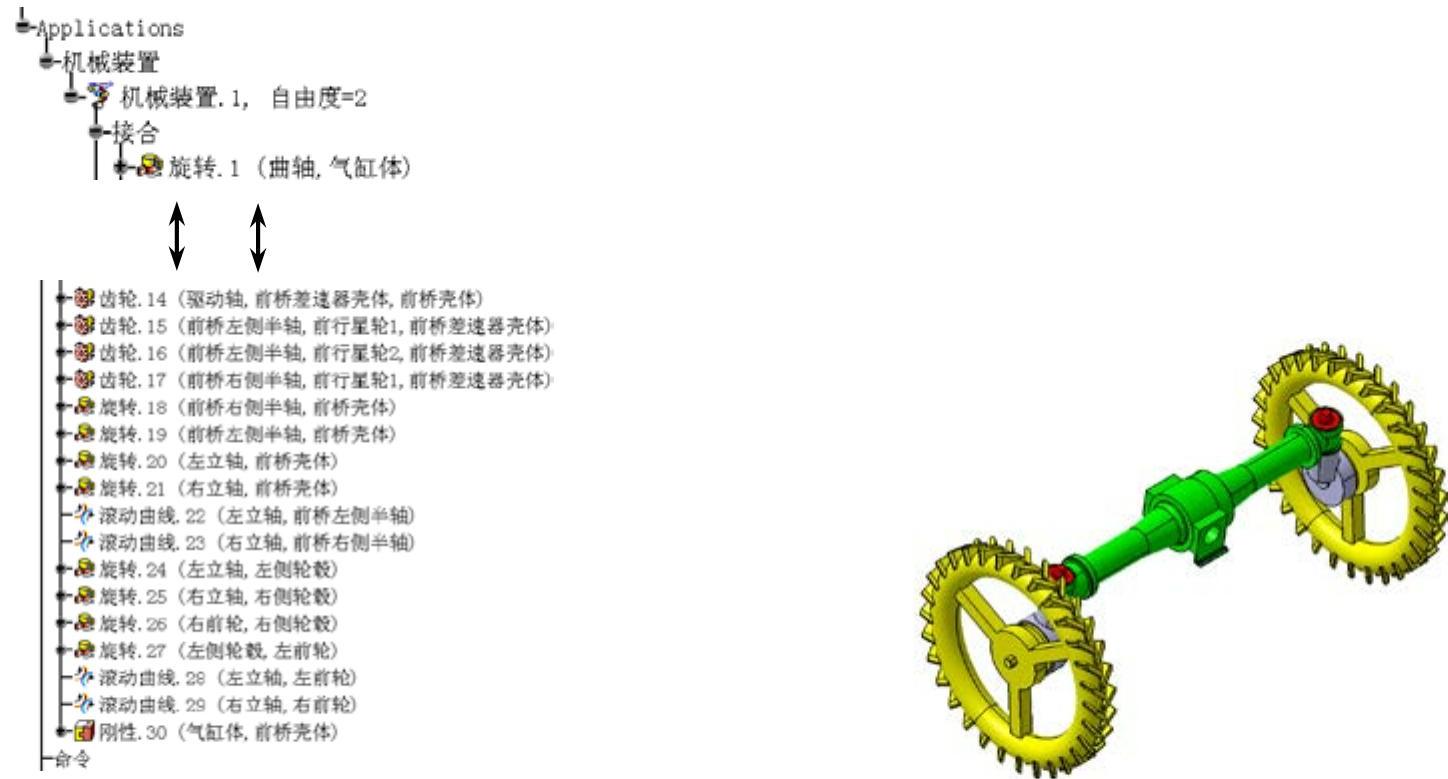
图6-52 前桥运动副结构树
(5)后桥
后桥组件如图6-55所示,运动副创建完成后的结构树如图6-56所示。后桥和前桥的差速器运动副中,其中一根半轴与两个行星齿轮均创建“齿轮接合(Gear Joint)”,另一根半轴只需要与其中一个行星齿轮创建“齿轮接合(Gear Joint)”。如果两根半轴都与两个行星齿轮创建“齿轮接合(Gear Joint)”将会导致过度约束。
运动副创建完成后,要根据差速器的特点调节两侧车轮的旋转方向,即发动机没有动力输入时,转动一侧车轮的另一侧车轮应反方向转动。
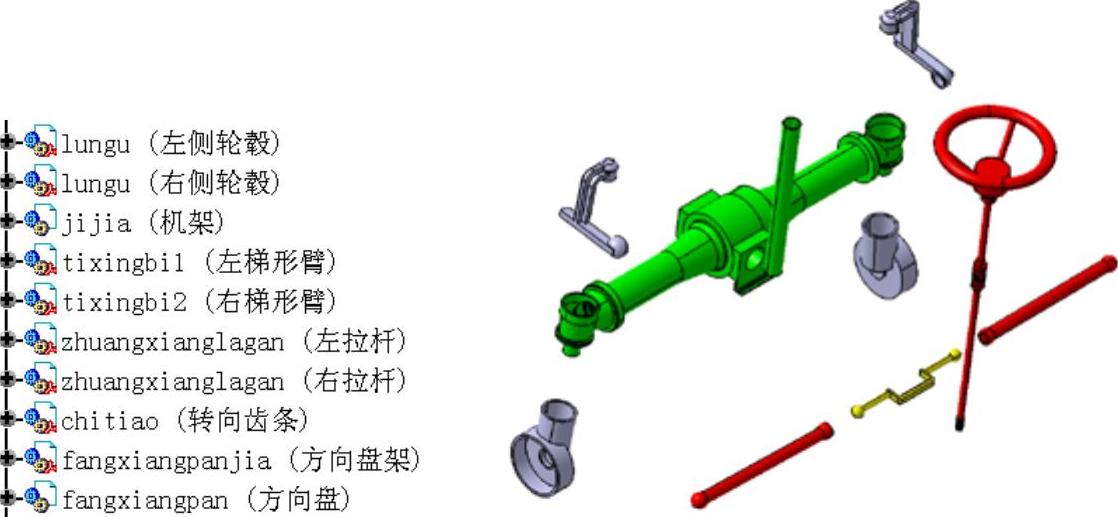
图6-53 转向机构组件

图6-54 转向机构运动副结构树

图6-55 后桥组件

图6-56 后桥运动副结构树
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。