



(1)创建轴系
打开随书光盘中的滑轨刀架组件(Exercise\5\5.3.2&2.2\huaguidaojia.CATPro duct),参见图2-14,或自行建立与之类似的可用于创建棱形运动副的3D模型组件。
进入“开始(Start)”→“机械设计(Mechanical Design)”→“装配件设计(AssemblyDesign)”工作台,完成滑轨刀架的静态装配。针对“基于轴的接合(棱形)”的运动副,其轴系的正确创建应满足两原点共同位于棱形机构的运动方向上,且两个轴系的z轴与运动方向平行或重合。
参考5.2.2节及“5.2.3节的介绍,在“滑轨”上构建点(0,0,0),并以此点为坐标中心创建一个轴系,同时调整Z轴为运动方向所在轴,如图5-15所示。
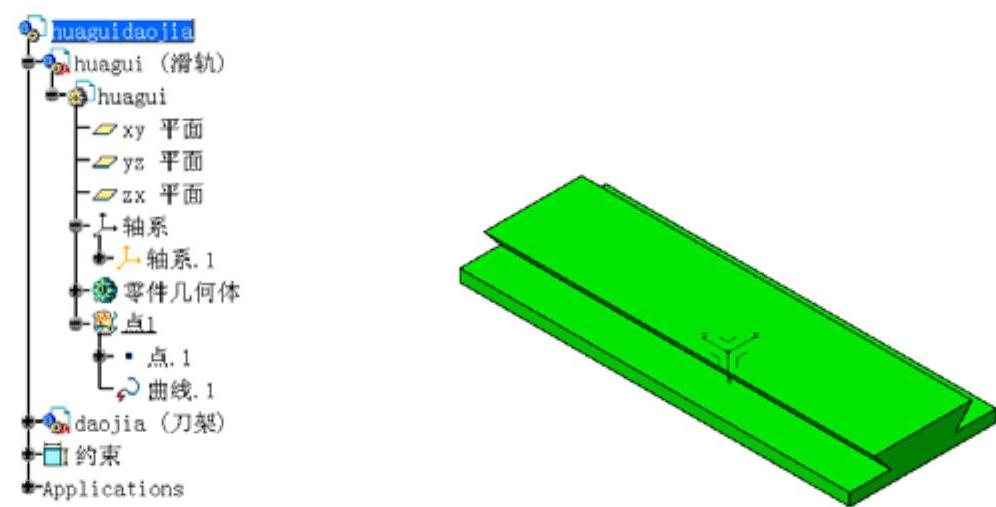
图5-15 滑轨上的轴系
本节所选实例中两零件的三维坐标平面虽重合但名称并不完全对应,同样需对“刀架”进行构建点并对创建轴系进行调整,调整方式参见5.2.3节的内容。点坐标为(0,0,0),即保证两轴系完全重合。这样“刀架”以“滑轨”中间截面为运动起始点,完成后结构树及机构中的轴系如图5-16所示。
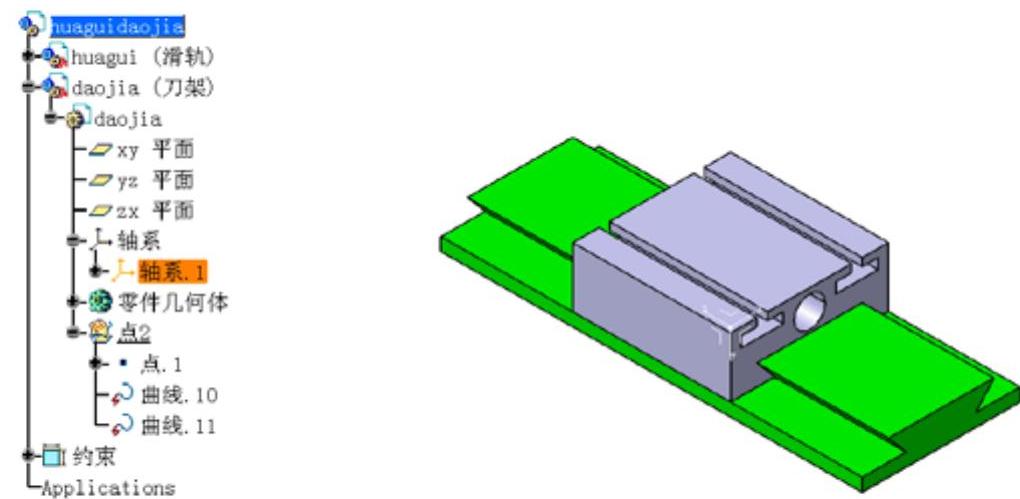
图5-16 工作界面显示轴系
如要求“刀架”从“滑轨”的起始端开始运动,可设置“刀架”上构建点的坐标值,经测量构建点的坐标为(50,0,0)。
如不调整所创建两轴系各轴方向相同且以Z轴为运动方向,则运动副创建完成后会出现“因过分约束而无法创建接合(The creation of the Joint isimpossible because the mechanism is over-constraint)”的提示,或在删除部分约束后机构并不能按预想效果运动,如图5-17所示。
对于未完成静态装配的“基于轴的接合(棱形)”的3D模型组件,机构创建完成机械装置后将自动归位,使Z轴重合的状态为运动初始位置。
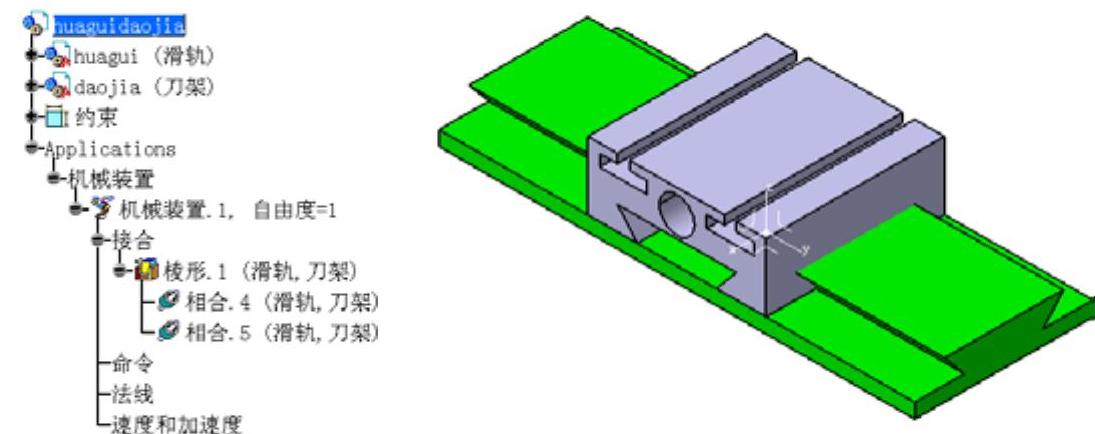
图5-17 非预期效果
(2)创建棱形运动副(https://www.xing528.com)
①切换至“开始(Start)”→“数字化装配(Digital Mockup)”→“DMU运动机构(DMU Kinematics)”工作台。在“DMU运动机构(DMU Kinematics)”→“运动接合点(Kinematics Joints)”工具栏中单击“基于轴的接合(Axis-based Joint)”图标 ,显示“创建基于轴的接合(Creation Axis-based Joint)”对话框,单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,对话框更新显示(参见图5-10)。
,显示“创建基于轴的接合(Creation Axis-based Joint)”对话框,单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,对话框更新显示(参见图5-10)。
②在“接合类型(Joint Type)”选项栏中选择目标运动副,本例为“棱形(Prismatic)”,如图5-18所示。
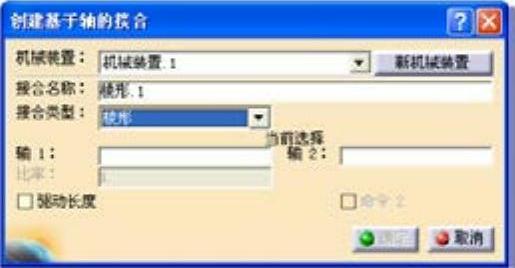
图5-18 选择接合类型
③选中在“滑轨”及“刀架”上创建的两个轴系,对话框更新显示,如图5-19所示。
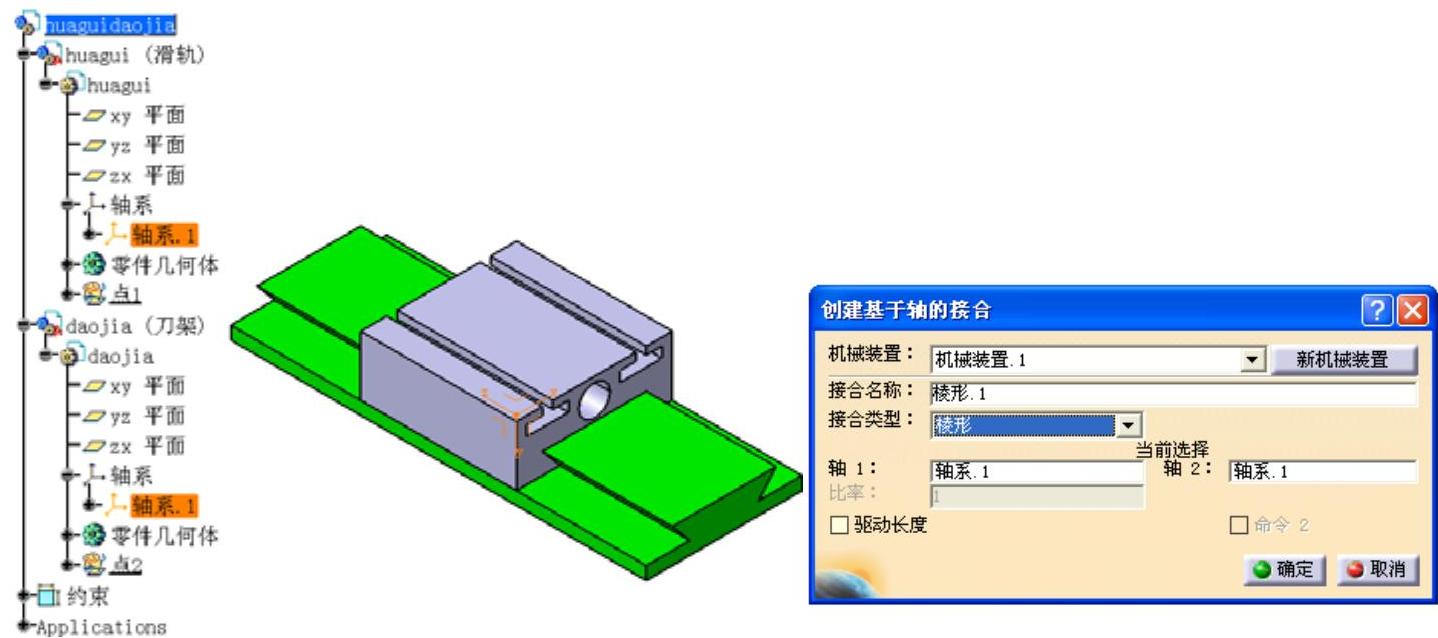
图5-19 选择轴系
④单击“确定(OK)”,完成“基于轴的接合(棱形)”的运动副的创建。在结构树上可以看到棱形运动副“棱形.1(Prismatic.1)(滑轨,刀架)”在“Applications\机械装置(Mechanisms)\接合(Joints)”节点下显示,如图5-20所示。
(3)机构驱动
参考2.2.3节内容设置机构驱动,运动机构建立完成后结构树如图5-21所示。
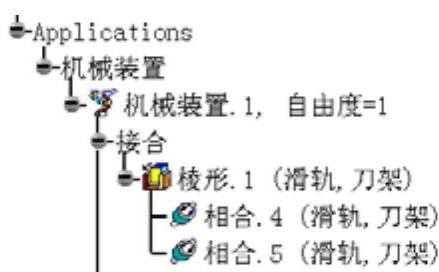
图5-20 结构树生成棱形运动副
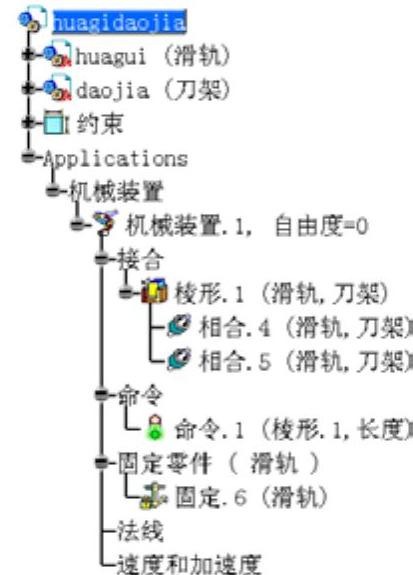
图5-21 基于轴的棱形运动副
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。