



(1)模型准备
打开随书光盘中的“Exercise\4\4.6.2&2.1&5.2.1\4.6.3\shizizhouwanxiangjie.CATProduct”,出现十字轴万向节构件,该构件已完成静态装配并完成除“刚”性外的全部相关运动副的创建,如图4-101所示,也可自行建立与之类似的可用于说明刚性应用的3D模型组件。
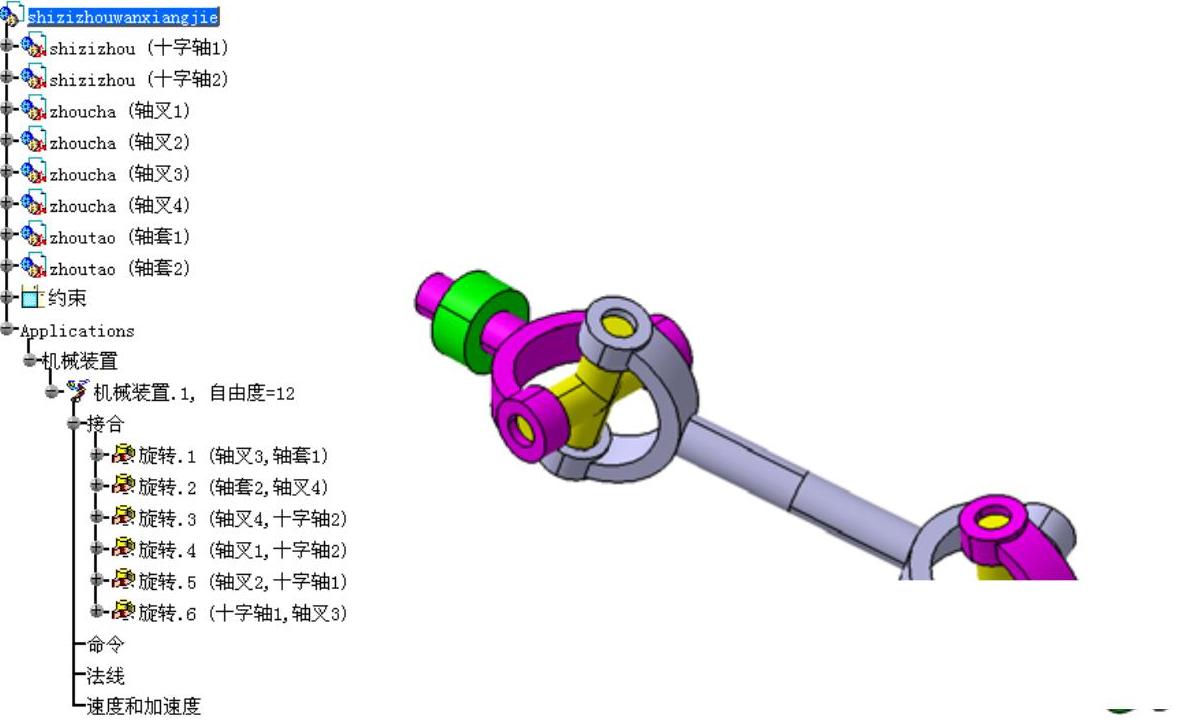
图4-101 十字轴万向节的静态装配约束及部分运动副创建
运动仿真中的“固定零件(Fixed Part)”命令仅适用于一个零部件,但有时为简化仿真效果的实现,需固定两个以上的零部件。本例“十字轴万向节”需固定“十字轴1”和“十字轴2”,固定连接“轴叉1”与“轴叉2”。
(2)创建刚性接合
①在“运动接合点(Kinematics Joints)”工具栏中单击“刚性接合(Rigid Joint)”图标 ,显示“创建接合:刚性(Joint Creation:Rigid)”对话框,单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,对话框更新显示,如图4-102所示。
,显示“创建接合:刚性(Joint Creation:Rigid)”对话框,单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,对话框更新显示,如图4-102所示。
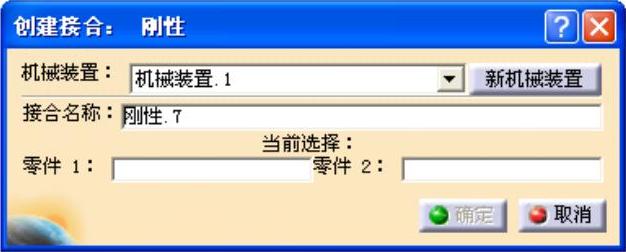
图4-102 创建刚性对话框
②分别选中“轴套1”及“轴套2”两个零部件,“创建接合:刚性(Joint Creation:Rigid)”对话框中“零件1(Part1)、零件2(Part2)”选项栏随选择自动更新,如图4-103所示。单击“确定(OK)”,在“Applications\机械装置(Mechanisms)\接合(Joints)”节点下生成“刚性.7(Rigid.7)(轴套1,轴套2)”,结构树中“自由度(DOF)”发生变化,如图4-104所示。(https://www.xing528.com)
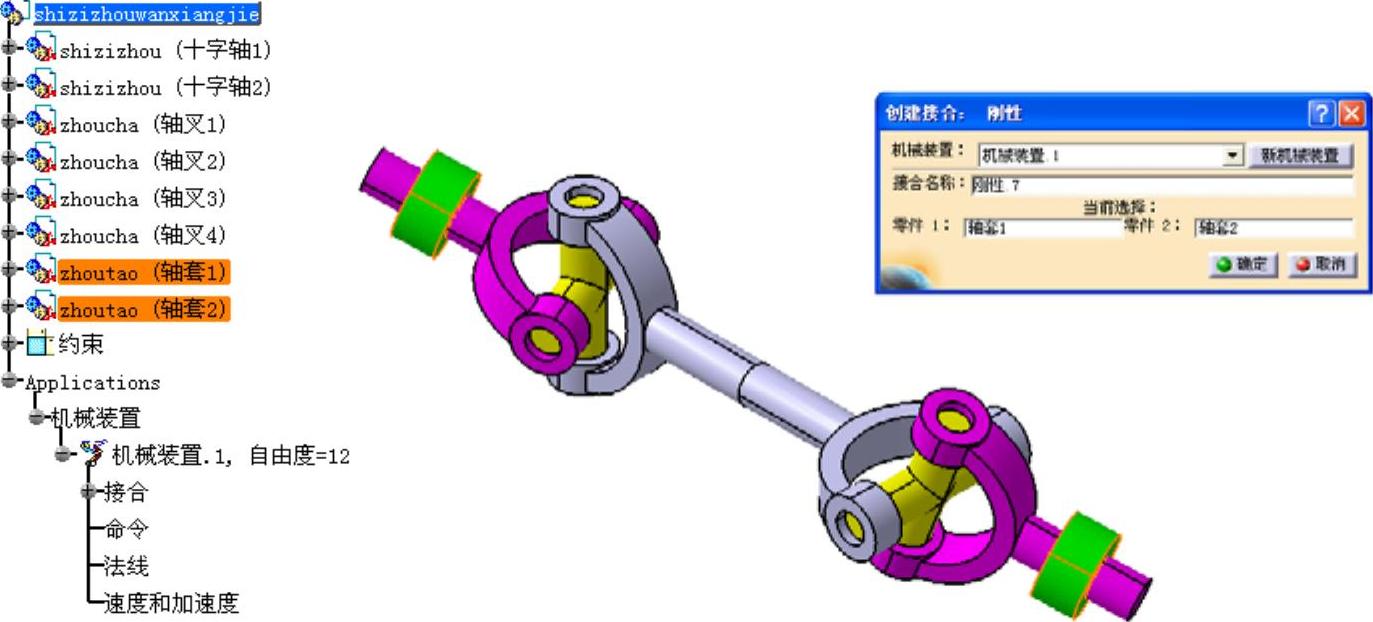
图4-103 创建刚性对话框更新显示
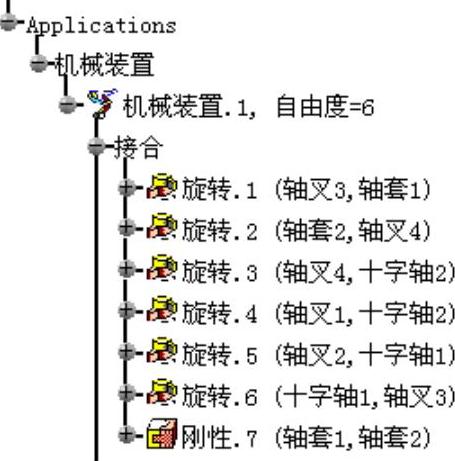
图4-104 结构树更新显示
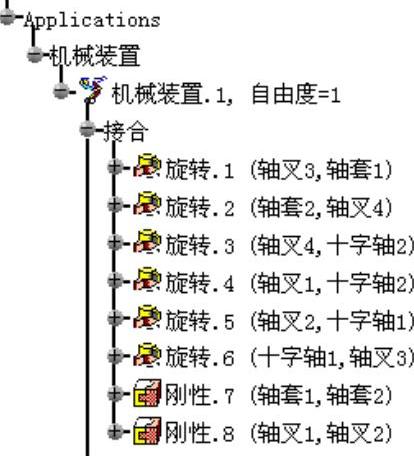
图4-105 结构树更新显示
③按上述步骤创建“轴叉1”与“轴叉2”间的刚性接合。在“Applications\机械装置(Mechanisms)\接合(Joints)”节点下生成“刚性.8(Rigid.8)(轴套1,轴套2)”,结构树中“自由度(DOF)”发生变化,如图4-105所示。
需要注意的是,在选择固定部件时“轴套1”或“轴套2”选择一个即可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。