



打开随书光盘中的“Exercise\2\2.5&5.3.5\qiuwanxiangjie.CATProduct”,出现球万向节组件,如图2-61所示,或自行建立与之类似的可用于创建球面副的3D模型组件。

图2-61 球万向节组件
(1)直接创建
①在“DMU运动机构(DMU Kinematics)”→“运动接合点(Kinematics Joints)”工具栏中单击“球面接合(Spherical Joint)”图标 ,显示“创建接合:球面(Joint Creation:Spherical)”对话框,如图2-62所示。
,显示“创建接合:球面(Joint Creation:Spherical)”对话框,如图2-62所示。
②单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”。“创建接合:球面(Joint Creation:Spherical)”对话框更新显示,如图2-63所示。同时,结构树中“Applications”节点下生成“机械装置(Mechanisms)”及其下一级节点,如图2-64所示。

图2-62 创建球面对话框

图2-63 创建球面对话框更新显示

图2-64 结构树上的机械装置
③在几何模型中选择创建要素。如图2-65所示,分别选中两球体的中心,“创建接合:球面(Joint Creation:Spherical)”对话框中“点1(Point1)、点2(Point2)”选项栏也随着选择自动更新。

图2-65 选择点
④单击“确定(OK)”,球面运动机构创建完成。在结构树上可以看到球面运动副“球面.1(Spherical.1)(球头,球孔)”在“Applications\机械装置(Mechanisms)\接合(Joints)”节点下显示,如图2-66所示,装配“约束(Constraints)”节点下也自动生成对应的“相合(Coincidence)”约束。(https://www.xing528.com)
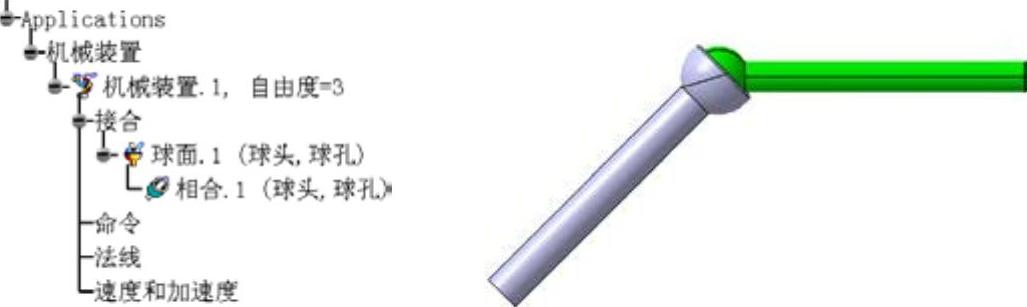
图2-66 结构树的变化
(2)装配约束转换
①进入“开始(Start)”→“机械设计(Mechanical Design)”→“装配件设计(Assembly Design)”工作台,完成球万向节的静态装配。装配约束如图2-67所示。
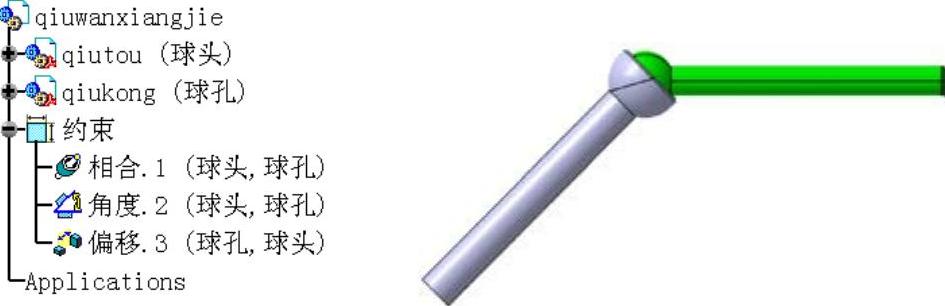
图2-67 静态装配及约束
②切换至“开始(Start)”→“数字化装配(Digital Mockup)”→“DMU运动机构(DMU Kinematics)”工作台,将静态装配约束中限制球头转动和摆动的约束“角度.2(Angle.2)(球头,球孔)”及“偏移.3(Offset.3)(球孔,球头)”删除,如图2-68所示。

图2-68 删除角度和偏移约束
③在“DMU运动机构(DMU Kinematics)工具栏”中单击“装配件约束转换(Assembly Constraints Conversion)”图标 ,显示“装配件约束转换(Assembly Constraints Conversion)”对话框(参见图1-11)。
,显示“装配件约束转换(Assembly Constraints Conversion)”对话框(参见图1-11)。
④单击“新机械装置(New Mechanism)”,创建“机械装置.1(Mechanism.1)”,显示“创建机械装置(Mechanism Creation)”对话框(参见图1-12)。用户可以根据需要重命名。
⑤单击“确定(OK)”,“装配件约束转换(Assembly Constraints Conversion)”对话框更新显示(参见图1-13)。单击“自动创建(Auto Create)”进行装配约束到运动副的转换,转换进度通过对话框中间窗口显示。待转换完成后,单击“确定(OK)”,在结构树上可以看到球面运动副“球面.1(Spherical.1)(球头,球孔)”在“Applications\机械装置(Mechanisms)\接合(Joints)”节点下显示,如图2-69所示,球面机构创建完成。
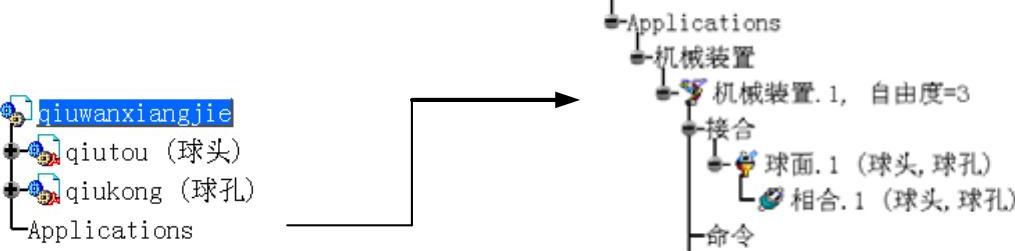
图2-69 结构树更新显示
结构树上显示该机构的“自由度(DOF)”为“3”,所以,球面副不能单独驱动,只能配合其他运动副来建立运动机构,实际应用可见6.2节。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。