



驱动命令施加是建立运动机构的最后一个步骤。
结构树上机械装置节点下显示的“自由度(DOF)”数量表示运动机构有多少个独立的运动,同时也代表了完全驱动该运动机构所需的命令数,驱动位置则根据机构的机械原理进行选择。对于本例滚动凸轮运动机构,驱动命令为1个,驱动点应选择“旋转.1(Revolute.1)(底座,凸轮)”。
施加该驱动命令可以通过两种途径进行:一是在结构树上双击“旋转.1(Revolute.1)(底座,凸轮)”;二是在结构树上选中“旋转.1(Revolute.1)(底座,凸轮)”,然后单击鼠标右键,在展开的菜单中选择“旋转.1对象(Revolute.1Object)”→“定义(Definition)”,操作路径如图1-40所示。
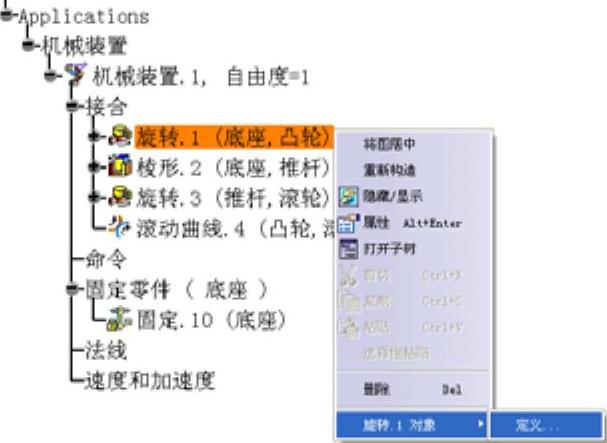
图1-40 定义驱动
以上两种操作方法均会弹出“编辑接合:旋转.1(旋转)(Joint Edition:Revolute.1)”对话框,对话框内显示该运动副的名称、构成要素(Joint Geometry)、运动范围“接合限制(Joints Limits)”及其上、下限,以及“驱动角度(Angle Driven)”复选框,如图1-41所示。选中对话框中“驱动角度(AngleDriven)”复选框,确认驱动该运动副,“接合限制(Joints Limits)”设定区被激活。同时,在机构上对应该运动副的运动部件上出现运动指示箭头,如图1-42所示。
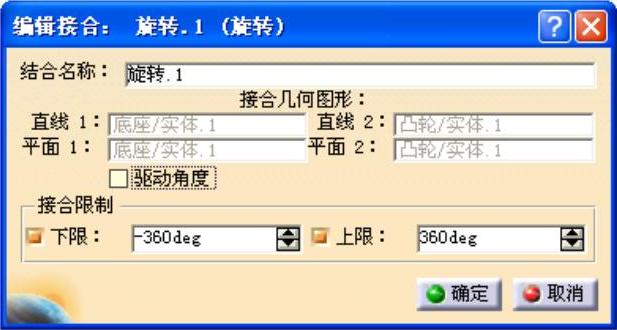
图1-41 编辑接合对话框
 (https://www.xing528.com)
(https://www.xing528.com)
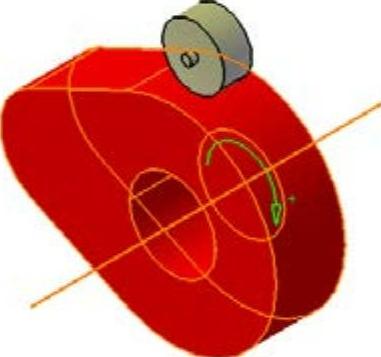
图1-42 凸轮运动形式与方向标示
当鼠标靠近模型时,运动部件按箭头方向进行示意性的运动,单击箭头可改变运动的方向。运动部件的运动范围可在对话框中“接合限制(Joints Limits)”功能区的“下限(Lower limits)”和“上限(Upper Limits)”设置栏内进行调整。
单击“确定(OK)”,完成驱动命令的设置,弹出“可以模拟机械装置(The mechanism can be simulated)”信息,如图1-43所示。同时,结构树上机械装置的“自由度(DOF)”由1变为0,并在“Applications\机械装置(Mechanisms)\命令(Commands)”节点下显示驱动命令“命令.1(Command.1)(旋转.1,角度)”的名称与性质,如图1-44所示。

图1-43 运动机构建立成功信息
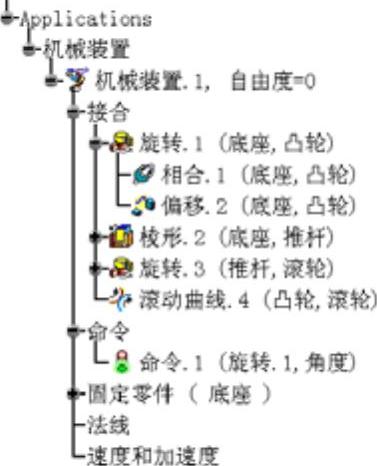
图1-44 结构树上的命令
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。