



一个典型的、具备运动仿真分析功能的数字样机,其结构树如图1-7所示。与其他仅完成静态装配约束的产品结构树相比,它最大的变化在于结构树上的“Applications”节点下出现了运动仿真专用的要素与子节点。
“机械装置(Mechanisms)”在运动副创建过程中生成。其中,“机械装置.1(Mechanism.1)”为运动机构的序号,一个“机械装置(Mechanisms)”下可以具有多个运动机构。
“自由度(DOF)”显示数字样机可动零部件的全部自由度。如固定件定义完成,且机构所有驱动命令被施加后自由度(DOF)=0,表示机构可以进行运动模拟。
“接合(Joints)”节点下显示数字样机已创建完成的所有运动副,该例为旋转(Revolute)、棱柱副(Prismatic)两个低副,以及一个点曲线(Point Curve)高副。
“命令(Commands)”节点中记录机构运动的驱动命令数量和驱动位置,本例为一个驱动命令,驱动位置为“旋转.1(Revolute.1)”。
“固定零件(Fix Part)”节点中记录被设计者固定的零部件。一个静止的“固定零件(Fix Part)”作为数字样机运动仿真过程中的参考元素,是机械可以进行运动模拟的必要条件。一个运动机构只能固定一个零部件,其他要求固定零件属性的零部件采用与已固定件刚性连接的方式进行处理。(https://www.xing528.com)
“法线/法则(Laws)”用以记录由设计者制定的、以公式或程序形式存在的、规定机构运动方式的函数或指令集。制定运动函数或动作程序是运动机构模拟仿真过程中一些运动参数(如速度、加速度、运动轨迹等)测量与分析的基础条件。
“速度和加速度(Speed-Acce lerations)”节点中显示数字样机中被放置了用于测量某一零部件或某一点速度与加速度的传感器。该传感器在运动分析时可以被激活,采集的信息可以图形或数据的形式供设计人员查看。一个数字样机可以在不同部件设置多个“速度和加速度(Speed-Accelerations)”传感器,采集所需要的信息。
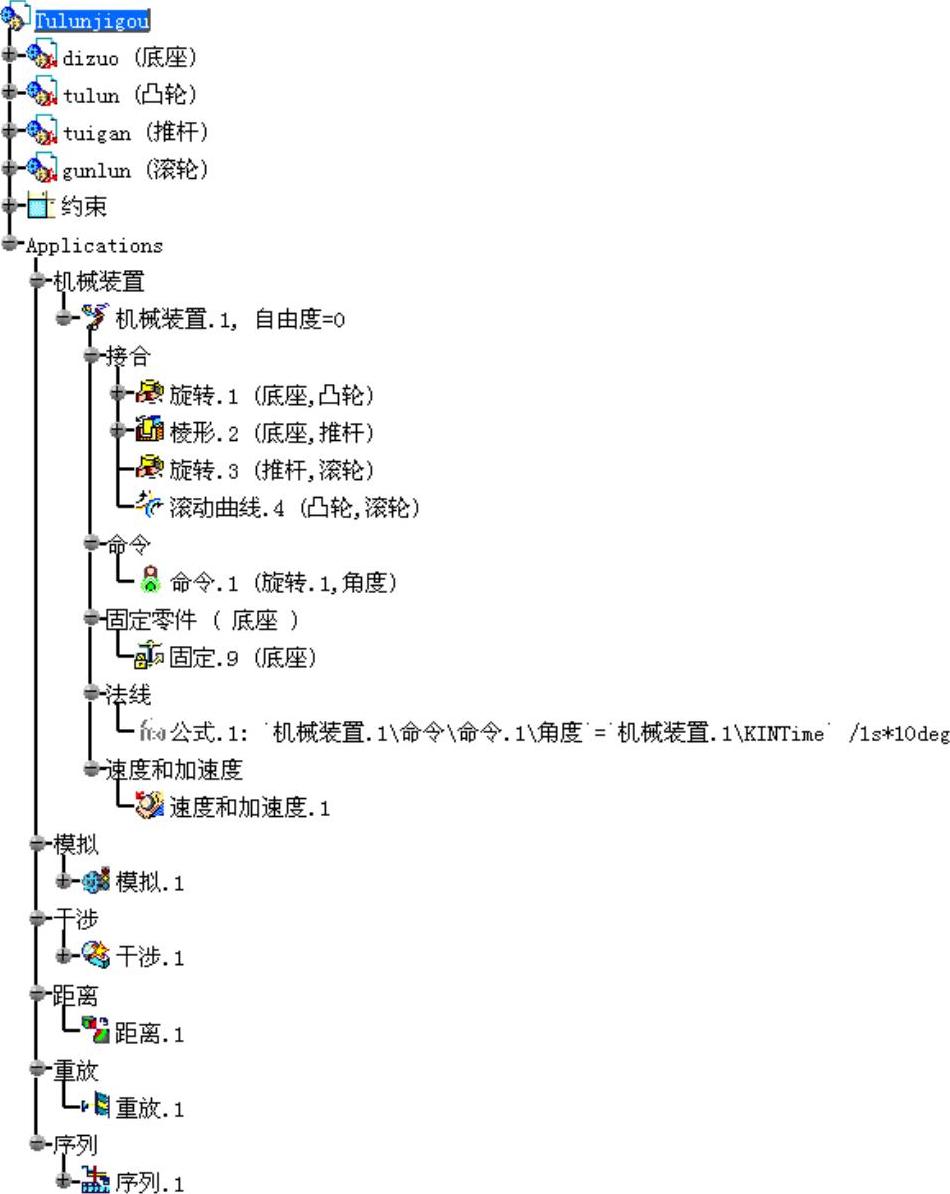
图1-7 具有运动仿真功能的数字样机结构树
“模拟(Simulation)”、“干涉(Interference)”、“距离(Distance)”、“重放(Replay)”、“序列(Sequences)”等与“机械装置(Mechanisms)”同属于“Applications”的下层节点,这些节点在数字样机运动仿真分析的相应操作过程中自动生成,记录分析结果或模拟状态,方便查看与研究。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。