



纵观塑性理论的研究历史,试验研究或实验验证的方法除单向拉伸、单向压缩外,大多采用薄壁管拉扭复合加载和薄板自由胀形,而对于复杂应力状态下的塑性理论问题,必须采用后两种试验方法。如图1-15所示,轴对称薄板自由胀形具有下列显著特点:
1)由于是轴对称问题,胀形前毛坯又是平板,所以仅用一个径向坐标r就可以完整地描述质点的几何位置。
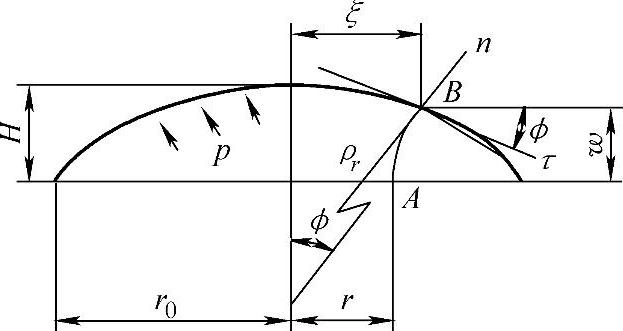
图1-15 轴对称薄板自由胀形示意图
2)胀形开始后,平板毛坯变为空间壳体,但由于是轴对称问题,胀形轮廓和质点的运动轨迹均可表示在一个子午剖面内,如图1-15所示。质点的位置可用瞬时坐标ξ和w表示,也可用ξ和ϕ表示,还可用ξ和ρr表示。后两种均为间接表示。胀形极点高度是时间的单值函数,H=H(t),因此可作为胀形时间的间接度量参数。
3)薄板胀形时表面积的增加靠板厚的不均匀变薄来补偿,变形区是确定的,即为直径为2r0的原始毛坯。板面内是双向伸长应变,板厚方向是压缩应变。应变主轴的方向是随胀形过程的进行而不断变化的。但由于是轴对称问题且受力状态简单(见后述),应变主轴的方向与胀形轮廓的变化有明确的关系,即质点所在位置胀形轮廓子午剖面的切线方向τ、法线方向n及周向θ是3个应变主方向。如图1-15所示,可以3个主轴建立随动坐标,其位置由(ξ,w)确定,其空间方位由ϕ确定。由此可见,求解薄板自由胀形的变形过程,最终就是要确定质点的瞬时坐标与原始坐标及胀形高度之间的关系,即
ξ=ξ(r,H),w=w(r,H) (1-75)
消去H便可得到表示胀形中质点运动轨迹的方程,即(https://www.xing528.com)
f(ξ,w,r)=0 (1-76)
若消去r,便可得到不同胀形高度时的胀形轮廓方程,即
g(ξ,w,H)=0 (1-77)
由式(1-77)又可确定随动坐标的空间方位,即

4)由上述分析可知,以随动坐标表示的3个应变主轴中,θ主轴的方向始终不变,τ和n两个主轴随胀形轮廓的变化而在子午剖面内改变方向。应变速率的概念是应变分量对时间的变化率,由于是轴对称问题,θ方向必定也是应变速率的一个主方向,且该主方向始终不变。对于薄板问题,厚度方向必定是应变速率的另一个主方向。根据张量的性质,第三个应变速率主方向则必定是胀形轮廓子午剖面的切线方向。所以,在薄板自由胀形过程中,质点的应变主轴与应变速率主轴始终是重合的。
5)薄板自由胀形的受力状态简单,唯一的外载荷是均布的胀形压力p,不存在摩擦因素。塑性成形中的摩擦无论是理论研究还是实测方法均不完善。自由胀形避免了摩擦的影响,质点的应力状态仅取决于材料本身的性质和胀形压力。薄板问题又可作为平面应力考虑,所以,薄板自由胀形属于板面内的双向拉应力状态。考虑到问题的轴对称性,图1-15中的随动坐标同时也是质点应力状态的主轴坐标。至此可得出结论:薄板自由胀形过程中,应变主轴、应变速率主轴及应力主轴三者始终重合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。