



1.伺服控制系统的速度控制模式运行
(1)实训目的 伺服控制系统的功能很广,有速度控制模式、转矩控制模式、位置控制模式以及这3种模式的组合模式。本项目练习速度控制模式,通过实训理解速度控制模式下的伺服电动机的运行特点。
(2)实训任务 在速度控制模式下,能完成7段调速以及电位器调速。

图7-74 PLC程序
(3)相关知识
1)理解伺服电动机和何服驱动器的控制原理。
2)理解伺服驱动器的参数设置要求和每调参数对系统运行情况的影响。
3)速度控制模式的使用场合以及速度控制模式的特点。
(4)实训设备 三菱MR-E-20A-KH003伺服控制器、HF-KN23JW1-S100伺服电动机、DC24V电源、接触器、中间继电器、按钮等组成的实训板。万用表、螺钉旋具等。
(5)实训内容
画出控制系统的原理图并接线。
1)系统控制主电路(见图7-75)。
2)系统控制回路(见图7-76)。
设置参数
首先设置参数No.19=100E,然后再设置表7-22中的参数,设置完毕后,把系统断电,重新起动,则参数有效。
表7-22 速度控制模式要设置的参数

开始运行
SP1、SP2,SP3调整电动机运行的最高速度,电动机运行速度表见表7-23。ST1、ST2控制电动机运行的方向及起动和停止,电动机运行方向见表7-24。
表7-23 电动机运行速度表

注:0:OFF(SG断开);
1:ON(SG接通)。

图7-75 系统控制主电路

图7-76 速度控制模式下的控制回路
表7-24 电动机运行方向
 (https://www.xing528.com)
(https://www.xing528.com)
注:0:OFF(SG断开);
1:ON(SG接通)。
2.伺服系统的位置控制模式
(1)实训目的 伺服系统是现在定位控制中使用非常广泛的一个系统,和步进系统比较具有控制精度高、转速快、带负载能力强等特点,当然价钱也比步进系统要贵得多。伺服系统在定位控制中应包含3个的设备:一是伺服电动机;二是伺服驱动器;三是控制的上位机,控制的上位机可以是PLC、单片机,还可以是专用的定位控制单元或模块,如FX-1PG、FX-10GM、FX2N-20GM等。本实训的目的主要是掌握伺服驱动器的用法,如系统的接线、参数设置、程序调试等。
(2)实训任务 以PLC作为上位机进行控制。控制台示意图如图7-77所示,按下起动按钮,电动机旋转,拖动工作台从A点开始向右行驶30mm,停2s,然后向左行驶返回A点,再停2s,如此循环运行,按下停止按钮,工作台行驶一周后返回A点。画出控制原理图,设置运行参数,写出控制程序并进行调试。要求工作台移动的速度要达到10mm/s,丝杆的螺距为5mm。

图7-77 控制台示意图
(3)相关知识
1)了解伺服驱动器和伺服电动机的工作原理。
2)了解伺服驱动器在位置控制模式中参数的设置和影响控制精度的因素。
3)了解伺服驱动器“电子齿轮”的概念和计算方法。
(4)实训设备 三菱MR-E-20A-KH003伺服控制器、HF-KN23JW1-S100伺服电动机、DC24V电源、接触器、中间继电器、按钮等组成的实训板。万用表、螺钉旋具等。
(5)实施步骤
1)画出控制系统的原理图并接线。
系统控制主电路如图7-75所示。
2)系统控制回路如图7-78所示。
设置参数
先设置参数No.19=000E,然后再设置表7-25中的参数,设置完毕后,把系统断电,重新起动,则参数有效。
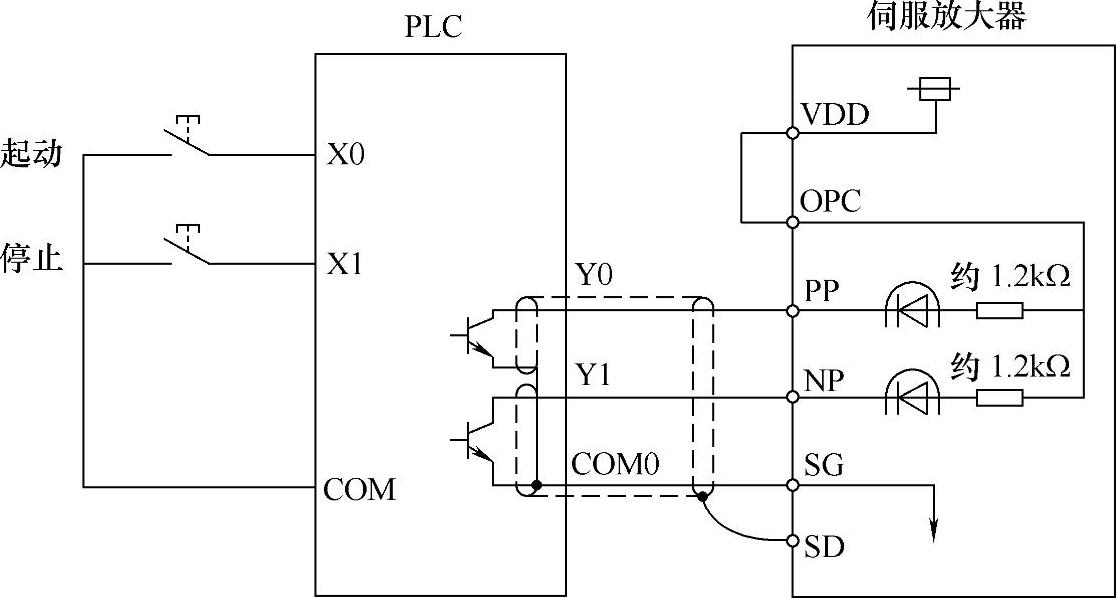
图7-78 系统控制回路
写出控制程序
根据控制要求,工作台从A点移到B点,电动机转6周,因此PLC要发出30000个脉冲,工作台移动的速度要达到10mm/s,则产生脉冲的频率为10000Hz。X0为起动信号,X1为停止信号,脉冲从Y0输出,Y1为控制方向。因此伺服位置控制梯形图如图7-79所示。

图7-79 伺服位置控制梯形图

图7-79 (续)
表7-25 位置控制模式要设置的参数

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。