



步进电动机一般要配有步进驱动器才能工作。
1.一般两相步进电动机驱动器端子(见图7-66)
图中:
1)PLS+、PLS-为步进驱动器的脉冲信号端子。接收上位机(PLC)发来的脉冲信号。
2)DIR+、DIR-为步进驱动器的方向信号端子。
3)FREE+、FREE-为脱机信号,步进电动机没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。
4)V+、GND为驱动器直流电源端子,也有交流供电类型。
5)A+、A-、B+、B-分别接步进电动机的两相线圈。
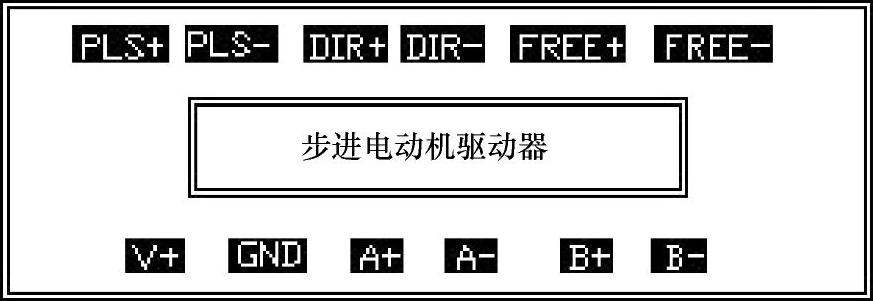
图7-66 两相步进电动机驱动器端子
FX系列PLC单元能同时输出两组100kHz脉冲,是低成本控制伺服与步进电动机的较好选择。但PLC的CPU采用FX系列的晶体管类型的PLC。
三菱晶体管PLC有两个高速脉冲输出点(Y0及Y1),因此此处即可接Y0,也可接Y1,但请不要接Y0、Y1以外的信号。Y2是控制电动机转向的方向信号,即Y2接通正转,Y2断开则反转。
三菱晶体管PLC发高速脉冲时,可以通过一些固有的指令输出高速脉冲串。
2.脉冲输出指令
1)PLSY脉冲输出指令如图7-67所示。
当X001接通,PLSY指令开始通过Y000输出脉冲,其中,D0为脉冲输出频率(Hz),也即控制步进电动机的转速;D2为脉冲输出量(PLS),也即控制步进电动机的转动行程。

图7-67 PLSY脉冲输出指令
Y000为脉冲输出地址。
2)PLSV可变脉冲输出指令如图7-68所示。

图7-68 PLSV可变脉冲输出指令
当X001接通,PLSV指令开始通过Y000输出脉冲,其中,D0为脉冲输出频率(Hz),也即脉冲/s,可以通过脉冲频率控制步进电动机的转速;Y000为脉冲输出地址;Y004为脉冲方向信号。如果D0为正数,则Y004变为“ON”;如果D0为负数,则Y004变为“OFF”,即使在脉冲输出状态中,仍能够自由改变脉冲频率。
由于在起动/停止时不执行加、减速,如果有必要进行缓冲开始/停止时,请利用RAMP等指令改变脉冲频率的数值。此指令驱动条件变为“OFF”(断开)后,在脉冲输出中标志M8148,M8148处于“ON”时,将不接受指令的再次驱动,因此有必要对其进行复位操作;若在脉冲输出过程中,指令驱动的接点X001变为“OFF”,将不进行减速而直接停止。
3)DRVI相对位置控制指令如图7-69所示。

图7-69 DRVI相对位置控制指令
当X001接通,DRVI指令开始通过Y000输出脉冲,其中,D0为脉冲输出数量(PLS);D2为脉冲输出频率(Hz);Y000为脉冲输出地址;Y004为脉冲方向信号。如果D0为正数,则Y004变为“ON”;如果D0为负数,则Y004变为“OFF”。若在指令执行过程中,指令驱动的接点X001变为“OFF”,将减速停止。此时执行完成标志M8029不动作。
所谓相对驱动方式,是指附带正/负符号的由当前位置开始的移动距离的方式。相对驱动图如图7-70所示。
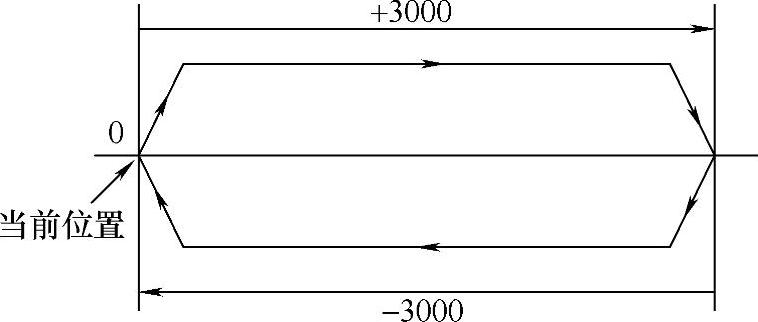
图7-70 相对驱动图
 (https://www.xing528.com)
(https://www.xing528.com)
图7-71 DRVA绝对位置控制指令
即从0点位置开始运动,发送+3000的脉冲后,步进电动机运行到+3000位置,此时若发送-3000的脉冲,步进电动机运行到0点位置。
4)DRVA绝对位置控制指令如图7-71所示。
当X001接通,DRVA指令开始通过Y000输出脉冲,其中,D0为脉冲输出数量(PLS);D2为脉冲输出频率(Hz);Y000为脉冲输出地址;Y004为脉冲方向信号。如果D0为正数,则Y004变为“ON”;如果D0为负数,则Y004变为“OFF”。若在指令执行过程中,指令驱动的接点X001变为“OFF”,将减速停止。此时执行完成标志M8029不动作。
3.步进电动机的控制实例分析
(1)控制实例(见图7-72)
步进电动机起始点在A点,AB之间是2000脉冲的距离,BC之间是3500脉冲的距离,步进电动机的控制要求如下:
1)按下起动按钮,步进电动机先由A移动到B,此过程速度为60r/min。
2)电动机到达B点后,停3s,然后由B移动到C,此过程速度为90r/min。
3)电动机到达C点后,停2s,然后由C移动到A,此过程速度为120r/min。
(2)分析
1)步进控制器如图7-73所示。

图7-72 控制实例
选择驱动器时确定步进电动机的相数及转矩、电流等参数。
2)几个信号做如下规定:
起动按钮:X000。
脉冲输出点:Y000。
脉冲方向Y002(假设Y002断开正转,接通反转)
图7-73 步进控制器
,。
3)采用相对位置控制指令(DRVI)进行控制。
①首先设定步进驱动的细分数为2000步/转。
②计算脉冲频率:假设脉冲频率应为XHz,实际运行的转速为Nr/min。则对应的关系式:

当速度是60r/min时,频率应为2000Hz。
当速度是80r/min时,频率应为3000Hz。
当速度是120r/min时,频率应为4000Hz。
4)PLC程序(见图7-74)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。