



按不同的控制原理,伺服系统可分为开环、闭环和半闭环等伺服系统。
(1)开环伺服系统(open loop)若控制系统没有检测反馈装置则称为开环伺服系统。它主要由驱动电路、执行元件和被控对象3大部分组成。常用的执行元件是步进电动机,通常以步进电动机作为执行元件的开环系统是步进式伺服系统,在这种系统中,如果是大功率驱动时,用步进电动机作为执行元件。驱动电路的主要任务是将指令脉冲转化为驱动执行元件所
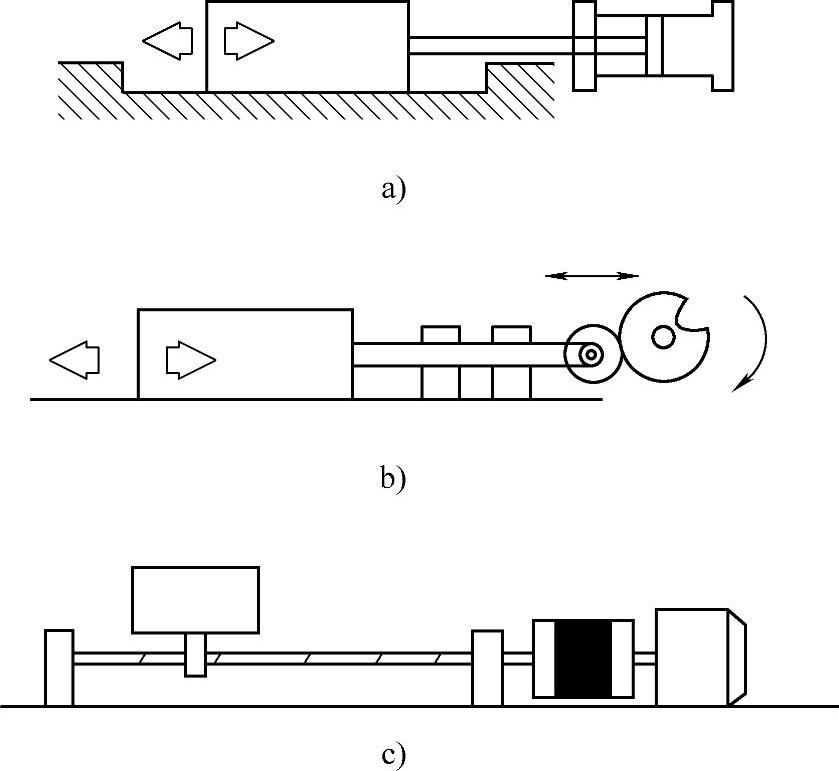
图7-59 简单控制系统
a)气动控制b)凸轮控制c)离合器/刹车系统
需的信号。开环伺服系统结构简单,但精度不是很高。
目前,大多数经济型数控机床采用这种没有检测反馈的开环控制结构。近年来,老式机床在数控化改造时,工作台的进给系统更是广泛采用开环控制,这种控制的结构简图如图7-60所示。
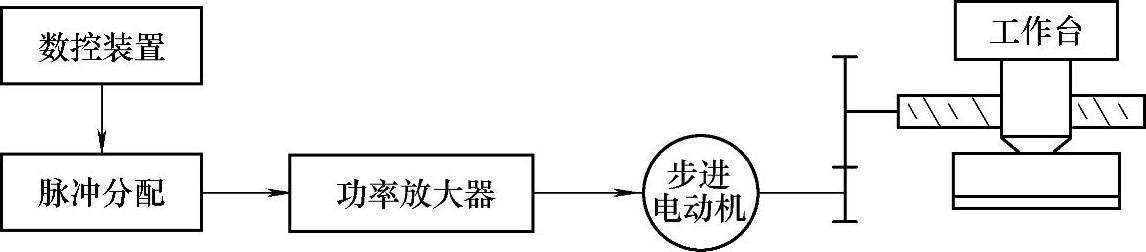
图7-60 开环伺服系统结构简图
数控装置发出脉冲指令,经过脉冲分配和功率放大后,驱动步进电动机和传动件的累积误差。因此,开环伺服系统的精度低,一般可达到0.01mm左右,且速度也有一定的限制。虽然开环控制在精度方面有不足,但其结构简单、成本低、调整和维修都比较方便。另外,由于被控量不以任何形式反馈到输入端,所以其工作稳定、可靠,因此,在一些精度、速度要求不是很高的场合,如线切割机、办公自动化设备中还是获得了广泛应用。
(2)半闭环伺服系统 通常把安装在电动机轴端的检测元件组成的伺服系统称为半闭环系统,由于电动机轴端和被控对象之间传动误差的存在,半闭环伺服系统的精度要比闭环伺服系统的精度低一些。(https://www.xing528.com)
图7-61所示是一个半闭环伺服系统的结构简图。
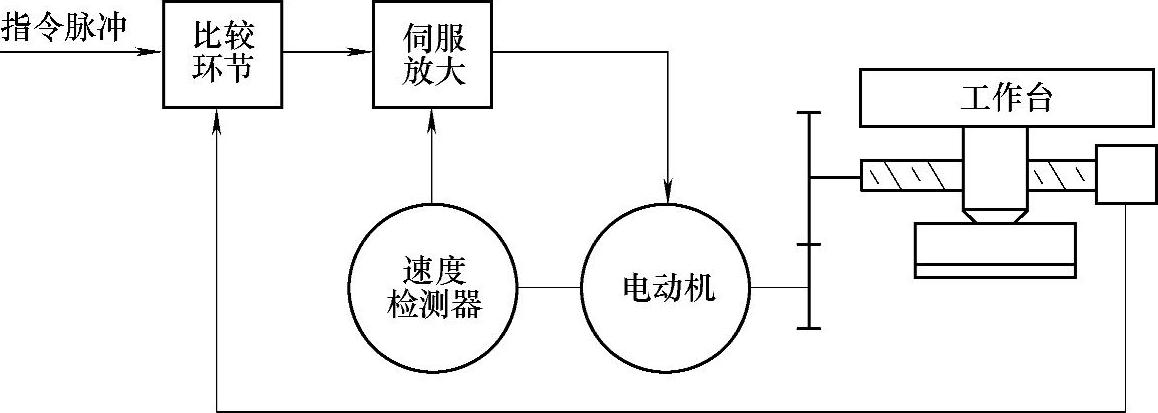
图7-61 半闭环伺服系统的结构简图
工作台的位置通过电动机上的传感器或是安装在丝杆轴端的编码器间接获得,它与全闭环伺服系统的区别在于其检测元件位于系统传动链的中间,故称为半闭环伺服系统。显然,由于有部分传动链在系统闭环之外,故其定位精度比全闭环的稍差。但由于测量角位移比测量线位移容易,并可在传动链的任何转动部位进行角位移的测量和反馈,故结构比较简单,调整、维护也比较方便。由于将惯性质量很大的工作台排除在闭环之外,这种系统调试较容易、稳定性好,具有较高的性价比,被广泛应用于各种机电一体化设备中。
(3)全闭环伺服系统 全闭环伺服系统主要由执行元件、检测元件、比较环节、驱动电路和被控对象5部分组成。在闭环系统中,检测元件将被控对象移动部件的实际位置检测出来并转换成电信号反馈给比较环节。常见的检测元件有旋转变压器、感应同步器、光栅、磁栅和编码器等。
图7-62所示是一个全闭环伺服系统结构简图,安装在工作台上的位置检测器可以是直线感应同步器或长光栅,它可将工作台的直线位移转换成电信号,并在比较环节与指令脉冲相比较,所得到的偏差值经过放大,由伺服电动机驱动工作台向偏差减小的方向移动。若数控装置中的脉冲指令不断地产生,工作台就随之移动,直到偏差等于零为止。
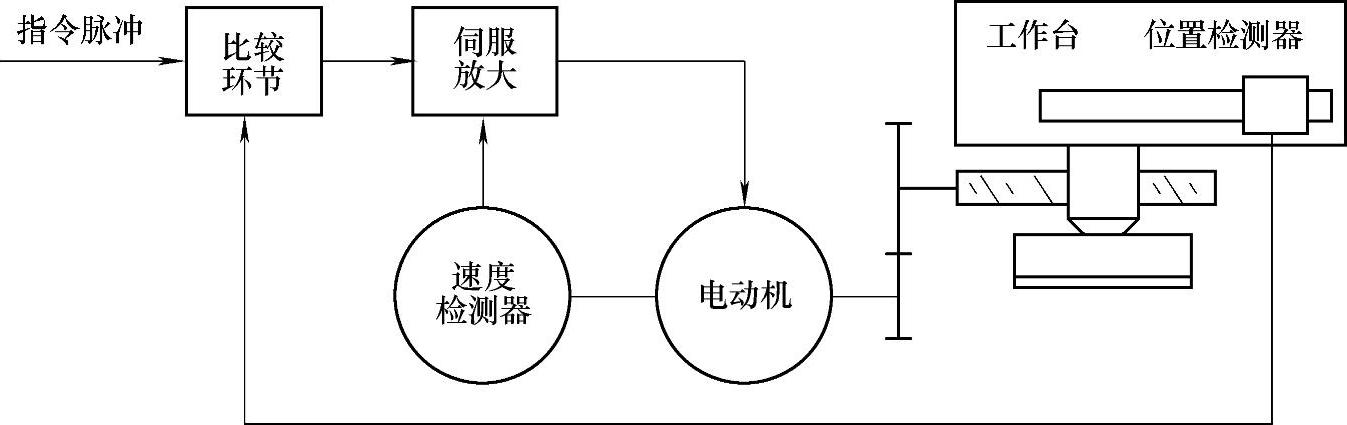
图7-62 全闭环伺服系统结构简图
全闭环伺服系统将位置检测器件直接安装在工作台上,从而可获得工作台实际位置的精确信息,定位精度可以达到亚微米量级。从理论上讲,其精度主要取决于检测反馈部件的误差,而与放大器、传动装置没有直接的联系,是实现高精度位置控制的一种理想的控制方案。但实现起来难度很大,机械传动链的惯量、间隙、摩擦、刚性等非线性因素都会给伺服系统造成影响,从而使系统的控制和调试变得异常复杂,制造成本亦会急速攀升。因此,全闭环伺服系统主要用于高精密和大型的机电一体化设备。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。