



交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。低档的伺服系统调速范围在1∶1000以上,一般的在1∶5000~1∶10000,高性能的可以达到1∶100000以上。定位精度一般都要达到±1个脉冲,稳速精度,尤其是低速下的稳速精度比如给定1r/min时,一般的在±0.1r/min以内,高性能的可以达到±0.01r/min以内。动态响应方面,通常衡量的指标是系统最高响应频率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90°或者幅值不小于50%。进口三菱伺服电动机MR-J3系列的响应频率高达900Hz,而国内主流产品的频率在200~500Hz。运行稳定性方面,主要是指系统在电压波动、负载波动、电动机参数变化、上位控制器输出特性变化、电磁干扰以及其他特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。
1.控制策略
在控制策略上,基于电动机稳态数学模型的电压频率控制方法和开环磁通轨迹控制方法都难以达到良好的伺服特性。目前普遍应用的是基于永磁电动机动态解耦数学模型的矢量控制方法,这是现代伺服系统的核心控制方法。虽然人们为了进一步提高控制特性和稳定性,提出了反馈线性化控制、滑模变结构控制、自适应控制等理论,还有不依赖数学模型的模糊控制和神经元网络控制方法,但是大多是在矢量控制的基础上附加应用这些控制方法。还有,高性能伺服控制必须依赖高精度的转子位置反馈,人们一直希望取消这个环节,发展了无位置传感器技术(Sensorless Control)。至今,在商品化的产品中,采用无位置传感器技术只能达到大约1∶100的调速比,可以用在一些低档的对位置和速度精度要求不高的伺服控制场合中,比如单纯追求快速起停和制动的缝纫机伺服控制,这个技术的高性能化还有很长的路要走。
2.伺服系统的组成
由于伺服系统服务对象很多,如计算机光盘驱动控制、雷达跟踪系统、进给跟踪系统等,因而对伺服系统的要求也有所差别。工程上对伺服系统的技术要求很具体,可以归纳为以下几个方面:
1)对系统稳态性能的要求。
2)对伺服系统动态性能的要求。
3)对系统工作环境条件的要求。
4)对系统制造成本、运行的经济性、标准化程度、能源条件等方面的要求。
虽然伺服系统因服务对象的运动部件、检测部件以及机械结构等的不同而对伺服系统的要求也有差异,但所有伺服系统的共同点是带动控制对象按照指定规律做机械运动。从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节5部分。伺服系统组成原理框图如图7-58所示。(https://www.xing528.com)
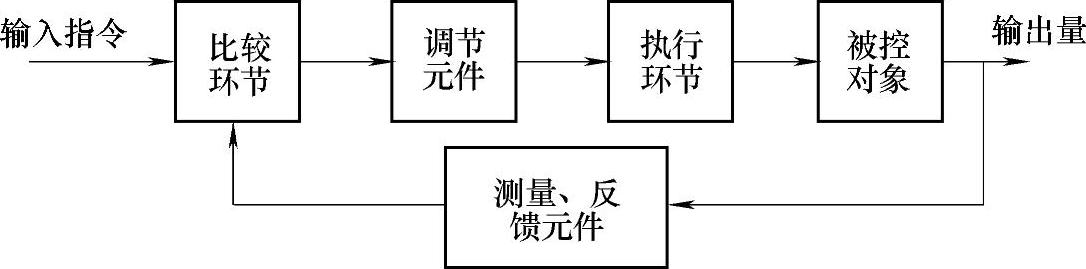
图7-58 伺服系统组成原理框图
(1)比较环节 比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
(2)控制器 控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
(3)执行环节 执行环节的作用是按控制信号的要求,将输入的各种形式的能量转换成机械能,驱动被控对象工作。
(4)被控对象 被控对象是指被控制的机构或装置,是直接完成系统目的的主体。被控对象一般包括传动系统、执行装置和负载。
(5)检测环节 检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
在实际的伺服控制系统中,上述每个环节在硬件特征上并不成立,可能几个环节在一个硬件中,如测速直流电动机既是执行元件又是检测元件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。