



步进电动机是一种将电脉冲转化为角位移的执行机构。一般电动机是连续旋转的,而步进电动机的转动是一步一步进行的。每输入一个脉冲电信号,步进电动机就转动一个角度。通过改变脉冲频率和数量,即可实现调速和控制转动的角位移大小,具有较高的定位精度,其最小步距角可达0.75°,转动、停止、反转反应灵敏、可靠。在开环数控系统中得到了广泛的应用。
1.步进电动机的分类、基本结构和工作原理
(1)步进电动机的分类
1)永磁式步进电动机。
2)反应式步进电动机。
3)混合式步进电动机。
(2)步进电动机的基本结构和工作原理
按照步进电动机的分类可知:
1)永磁式步进电动机一般为两相,转矩和体积较小,步进角一般为7.5°或15°。
2)反应式步进电动机一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和振动都很大。
3)混合式步进电动机是指混合了永磁式和反应式的优点,它又分为两相和五相。两相步进角一般为1.8°,而五相步进角一般为0.72°。这种步进电动机的应用最为广泛。
三相反应式步进电动机结构如图7-48所示,定子、转子是用硅钢片或其他软磁材料制成的。定子的每对极上都绕有一对绕组,构成一相绕组,共三相称为A、B、C三相。
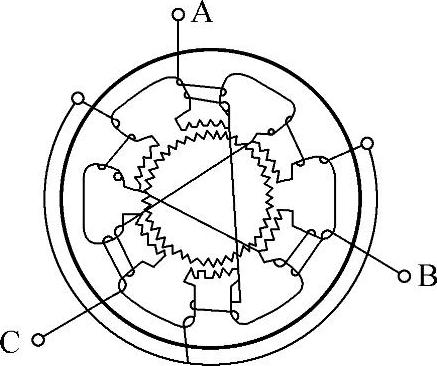
图7-48 三相反应式 步进电动机结构
在定子磁极和转子上都开有齿分度相同的小齿,采用适当的齿数配合,当A相磁极的小齿与转子小齿一一对应时,B相磁极的小齿与转子小齿相互错开1/3齿距,C相则错开2/3齿距。定子磁极和转子磁极位置如图7-49所示。
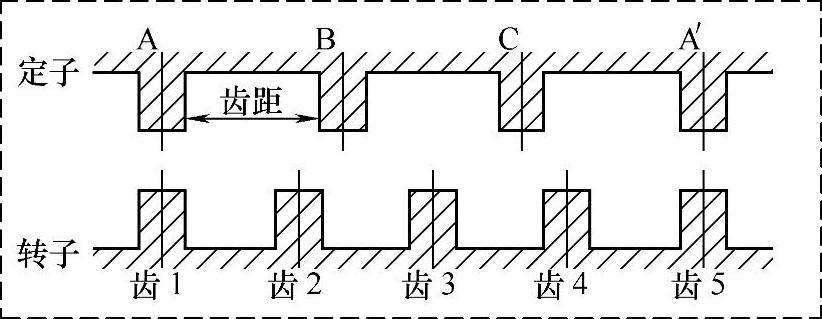
图7-49 定子磁极和转子磁极位置
上图中,A相绕组与齿1、5一一对应,而此时B相绕组与齿2错开1/3齿距,与齿3错开2/3齿距;C相绕组与齿3错开2/3齿距,而与齿4错开1/3齿距。电动机的位置和速度由绕组通电次数(脉冲数)和频率成一一对应关系。而方向由绕组通电的顺序决定。
(3)步进电动机的基本参数
1)电动机固有步距角:它表示控制系统每发一个步进脉冲信号,电动机所转动的角度。电动机出厂时给出了一个步距角的值,这个步距角可以称为“电动机固有步距角”,它不一定是电动机实际工作时的真正步距角,真正的步距角和驱动器有关。
2)步进电动机的相数:步进电动机的相数是指电动机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电动机。电动机相数不同,其步距角也不同,一般二相电动机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。在没有细分驱动器时,用户主要靠选择不同相数的步进电动机来满足自己步距角的要求。如果使用细分驱动器,则“相数”将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
3)保持转矩:保持转矩是指步进电动机通电但没有转动时,定子锁住转子的力矩。它是步进电动机最重要的参数之一,通常步进电动机在低速时的力矩接近保持转矩。由于步进电动机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电动机最重要的参数之一。比如,当人们说2N·m的步进电动机,在没有特殊说明的情况下是指保持转矩为2N·m的步进电动机。
4)钳制转矩:钳制转矩是指步进电动机没有通电的情况下,定子锁住转子的力矩。由于反应式步进电动机的转子不是永磁材料,所以它没有钳制转矩。
(4)步进电动机的主要特点
1)一般步进电动机的精度为步进角的3%~5%,且不累积。
2)步进电动机外表允许的最高温度取决于不同电动机磁性材料的退磁点。
步进电动机温度过高时会使电动机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电动机外表允许的最高温度应取决于不同电动机磁性材料的退磁点。一般来讲,磁性材料的退磁点都在摄氏130℃以上,有的甚至高达摄氏200°以上,所以步进电动机外表温度在摄氏80~90℃完全正常。
3)步进电动机的力矩会随转速的升高而下降。
当步进电动机转动时,电动机各相绕组的电感将形成一个反向电动势。频率越高,反向电动势越大。在它的作用下,电动机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4)步进电动机低速时可以正常运转,但若高于一定速度就无法起动,并伴有啸叫声。
步进电动机有一个技术参数:空载起动频率,即步进电动机在空载情况下能够正常起动的脉冲频率,如果脉冲频率高于该值,电动机不能正常起动,可能发生丢步或堵转。在有负载的情况下,起动频率应更低。如果要使电动机达到高速转动,脉冲频率应该有加速过程,即起动频率较低,然后按一定加速度升到所希望的高频(电动机转速从低速升到高速)。
2.步进电动机驱动器
(1)步进电动机驱动器的选型
1)驱动器的电流。电流是判断驱动器能力大小的依据,是选择驱动器的重要指标之一。通常驱动器的最大额定电流要略大于电动机的额定电流,有2.0A、3.5A、6.0A和8.0A。
2)驱动器的供电电压。供电电压是判断驱动器升速能力的标志,常规电压供给有24V(DC)、40V(DC)、60V(DC)、80V(DC)、110V(AC)、220V(AC)等。
3)驱动器的细分。细分是控制精度的标志,通过增大细分能改善精度。步进电动机都有低频振荡的特点,如果电动机需要工作在低频共振区,细分驱动器是很好的选择。此外,细分和不细分相比,输出转矩对各种电动机都有不同程度的提升。
(2)步进电动机驱动器 本系统中采用两相混合式步进电动机驱动器SH-20403细分驱动器,其外形如图7-50所示。
(3)步进电动机驱动器的端子与接线(见图7-51)

图7-50 SH-20403细分驱动器外形
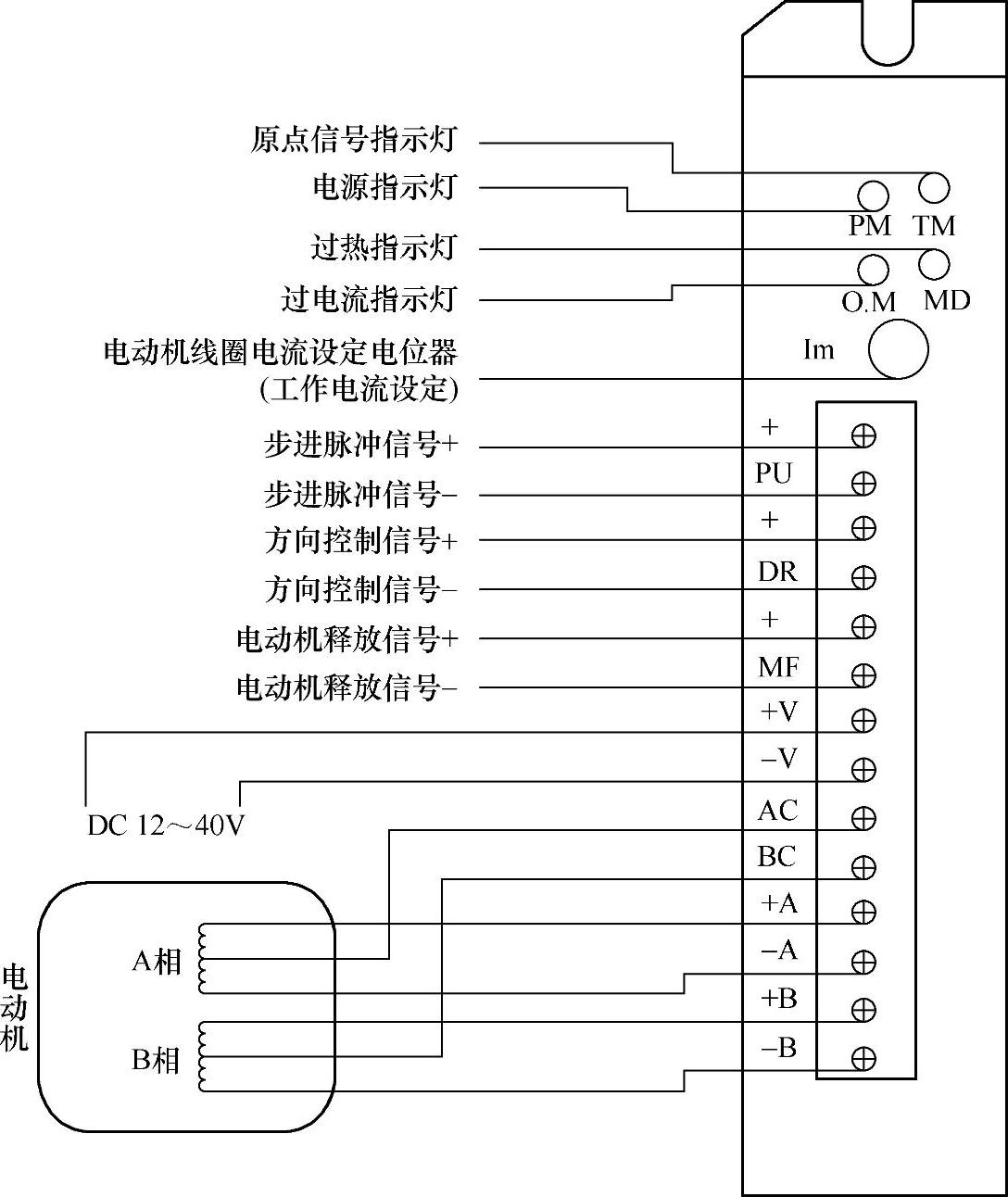
图7-51 步进电动机驱动器的端子与接线
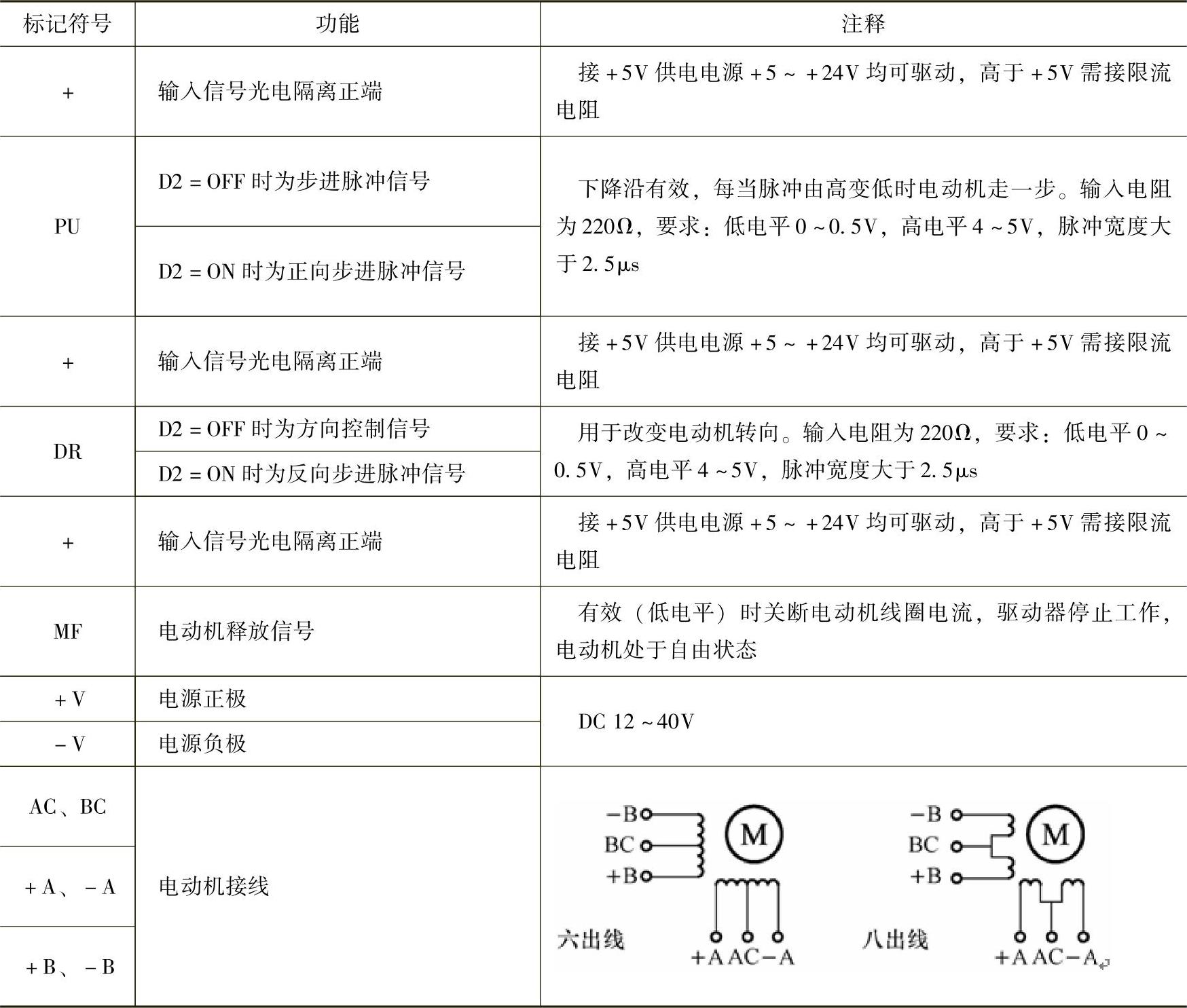
步进电动机驱动器端子说明见表7-11。
表7-11 步进电动机驱动器端子说明
(4)步进电动机驱动器的细分设定 YKA2404MC步进电动机驱动器共有6个细分设定开关。
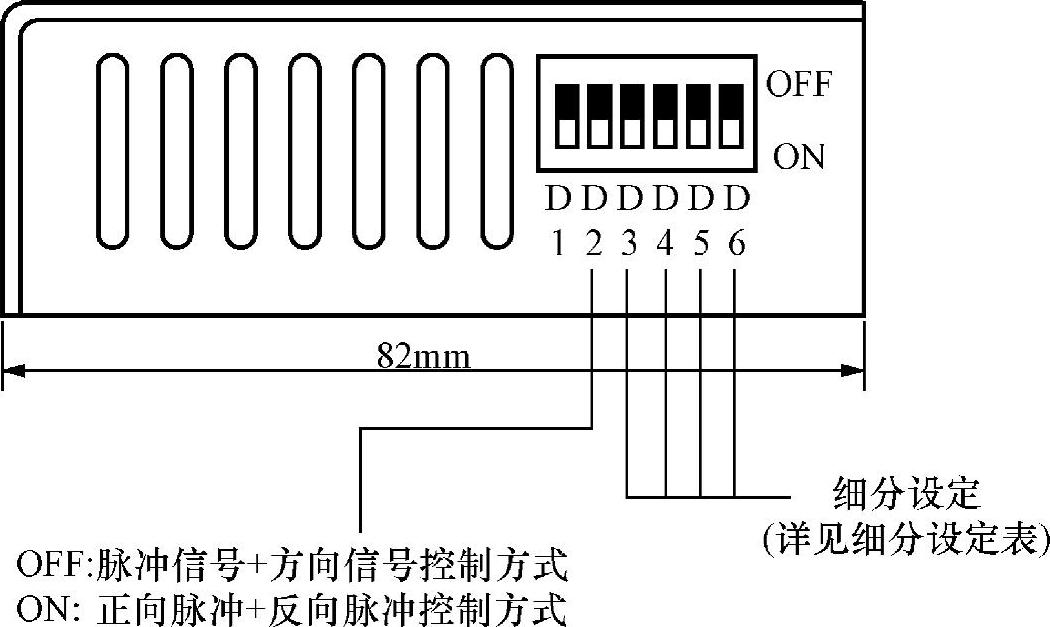
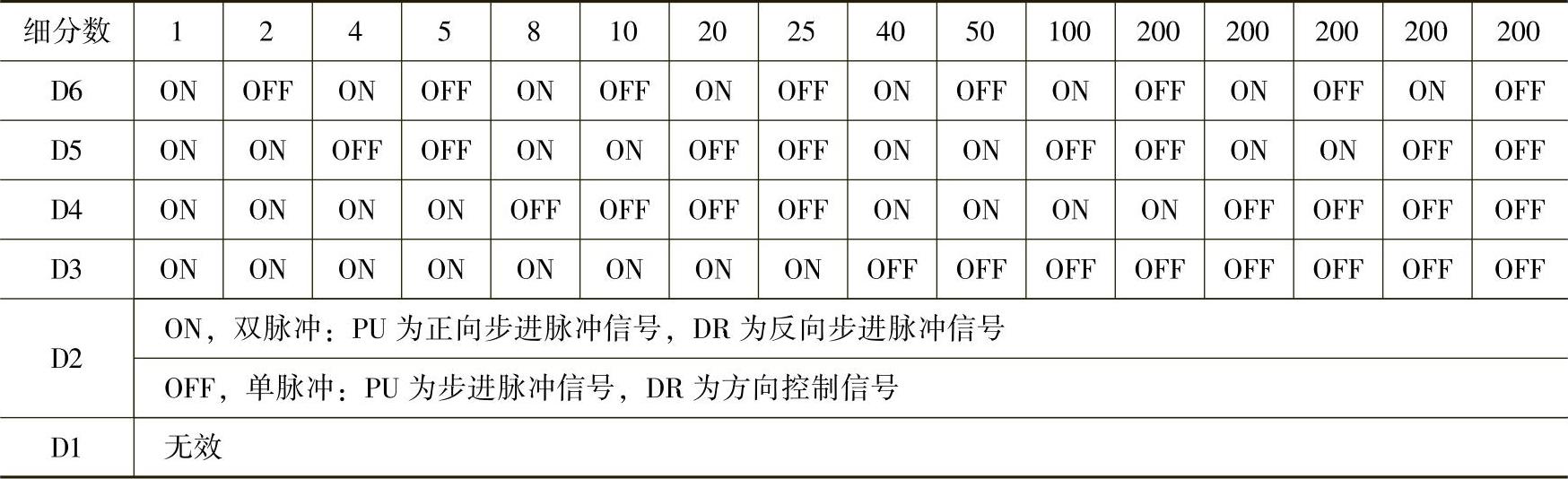
步进电动机驱动器细分设定表见表7-12。
表7-12 步进电动机驱动器细分设定表
3.三菱PLC控制步进电动机
在需要模拟量控制的场合,脉宽调制可以用来实现模拟量幅值的变化。FX2U系列PLC在FX2系列机基础上新增加了脉冲输出功能,通过本机(晶体管输出型)特定的输出口(Y000、Y001)可输出指定频率及数量的脉冲串或输出脉冲宽度可调制的脉冲串,用于简单的定位控制及模拟量控制。
脉冲输出类指令的说明:
(1)脉冲输出指令 这个指令的名称、指令代码、助记符、操作数、程序步见表7-13。
表7-13 脉冲输出指令

该指令可用于指定频率、产生定量脉冲输出的场合。使用说明如图7-52所示。[S1·]用于指定频率,范围为2~20kHz。[S2·]用于指定产生脉冲的数量,16位指令指定范围为1~32767,32位指令指定范围为1~2147483647。[D·]用以指定输出脉冲的Y号(仅限于晶体管型机Y000、Y001),输入脉冲的高低电平各占50%。指令的执行条件X010接通时,脉冲串开始输出,X010中途中断时,脉冲输出中止,再次接通时,从初始状态开始动作。设定脉冲量输出结束时,指令执行结束标志M8029动作,脉冲输出停止。当设置输出脉冲数为0时为连续脉冲输出。[S1·]中的内容在指令执行中可以变更,但[S2·]的内容不能变更。输出口Y000输出脉冲的总数存于D8140(下位)、D8141(上位)中,Y001输出脉冲总数存于D8142(下位)、D8143(上位)中,Y000及Y001两输出口已输出脉冲的总数存于D8136(下位)、D8137(上位)中。各数据寄存器的内容可以通过[DMOV K0D81□□]加以清除。
(2)可调速脉冲输出指令 该指令的名称、指令代码、助记符、操作数、程序步见表7-14。
该指令是带有加、减速功能的定尺寸传送脉冲输出指令。其功能是对所指定的最高频率进行指定加、减速时间的加、减速调节,并输出所指定的脉冲数。指令说明如图7-53所示。图7-53a为指令梯形图,当X010接通时,从初始状态开始定加速,达到所指定的输出频率后再在合适的时刻定减速,并输出指定的脉冲数。其波形如图7-53b所示。

图7-52 脉冲输出指令使用说明(https://www.xing528.com)
表7-14可调速脉冲输出指令

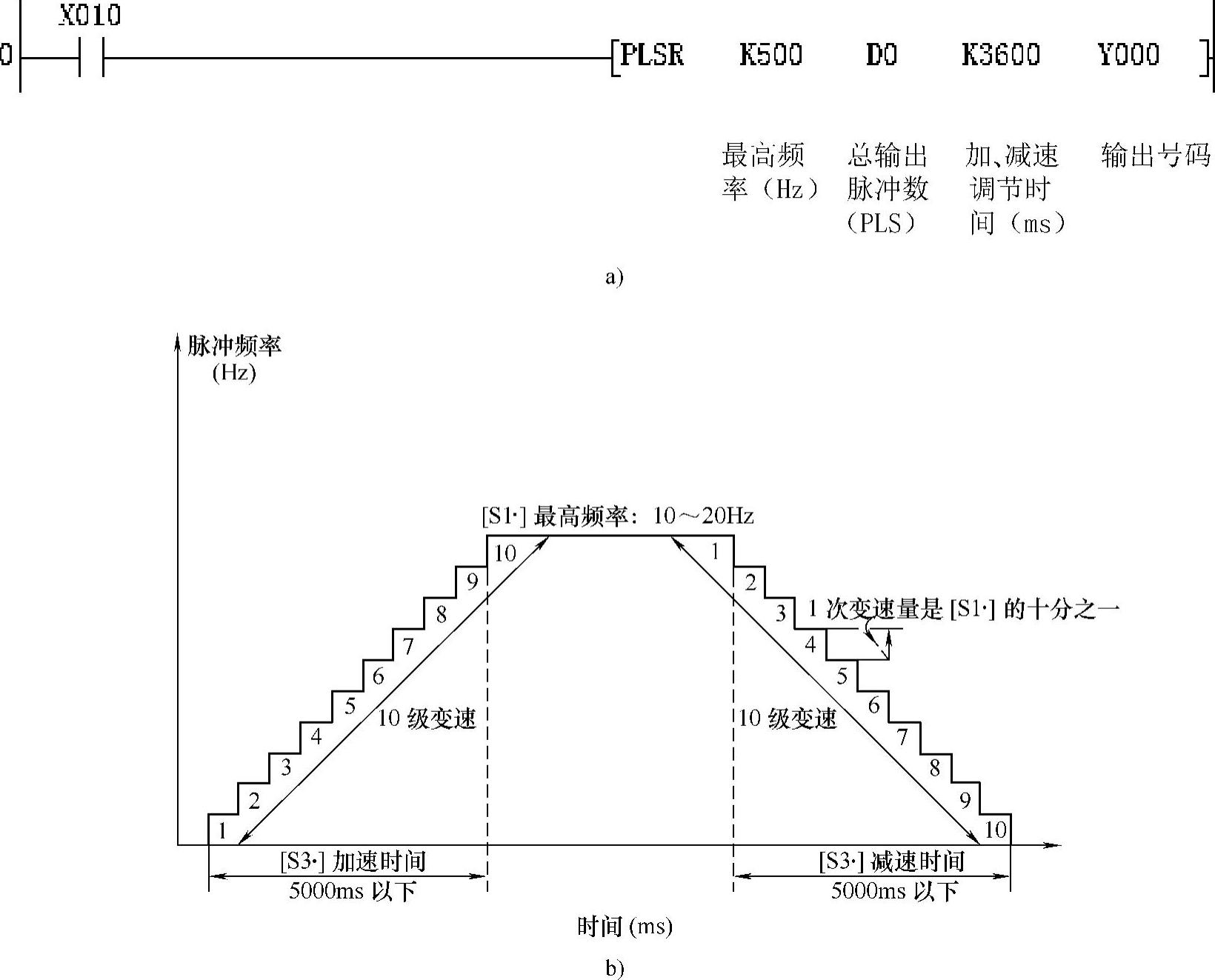
图7-53 可调速脉冲指令说明
a)指令梯形图b)波形
梯形图中各操作数的设定如下:
[S1·]是最高频率,设定范围为10~20kHz,并以10的倍数设定,若指定1位数时,则结束运行。在进行定减速时,按指定的最高频率的1/10作为减速时的一次变速量,即[S1·]的1/10。在应用该指令于步进电动机时,一次变速量应设定在步进电动机不失调的范围。
[S2·]是总输出脉冲数(PLS),设定范围为:16位运算指令,110~32767(PLS);32位指令,110~2147483647(PLS)。若设定不满110值时,脉冲不能正常输出。
[S3·]是加、减速时间(ms),加速时间与减速时间相等。加、减速时间设定范围为5000ms以下,应按以下条件设定:
①加、减速时需设定在PLC的扫描时间最大值(D8012)的10倍以上,若设定不足10倍时,加、减速不一定计时。
②加、减速时间最小值设定应大于下式,即[S3·]<([S2·]/[S1·])*818。
若小于上式的最小值,加、减速时间的误差增大。此外,设定不到90000/[S1·]值时,在90000/[S1·]值时结束运行。
③加、减速时间最大值设定应小于下式,即[S3.]>(90000/[S1·])*5。
④加、减速的变速数按[S1·]/10,次数固定在10次。
在不能按以上条件设定时,应降低[S1·]设定的最高频率。
[D·]是指定脉冲输出的地址号,只能是Y000及Y001,且不能与其他指令共用。其输出频率为10~20kHz,当指令设定的最高频率、加/减速时的变速速度超过了此范围时,自动在该输出范围内调低或进位。FNC59(PLSR)指令的输出脉冲数存入的特殊数据寄存器与FNC57(PLSY)相同。
(3)脉宽调制指令 指令的名称、指令代码、助记符、操作数、程序步见表7-15。
表7-15脉宽调制指令

脉宽调速PWM指令如图7-54所示。该指令用于指定脉冲宽度、脉冲周期、产生脉宽可调脉冲输出的场合。梯形图中[S1·]指定D10存入脉冲宽度t,t理论上可在0~32767ms范围内选取,但不能大于周期,即本例中D10的内容只能在[S2·]指定的脉冲周期T0=50以内变化,否则会出现错误。[D·]指定脉冲输出Y号(晶体管输出型PLC中Y000或Y001)为Y000,其平均输出对应为0~1009/6。当X010接通时,Y000输出为“ON/OFF”脉冲,脉冲宽度比为T/T0,可进行中断处理。
(4)PLC控制步进电动机控制器
步进电动机控制器采用两相混合式步进电动机细分驱动器(SH-20403),其特点如下:
1)10~40V直流供电。
2)H桥双极恒相流驱动。
3)最大3A的8种输出电流可选。
4)最大64细分的7种细分模式可选。
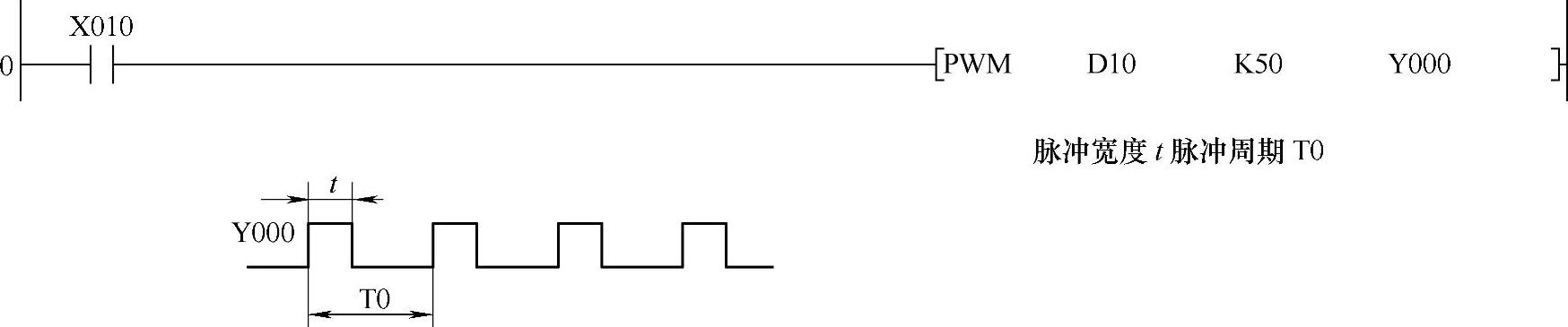
图7-54 脉宽调速PWM指令
5)输入信号光电隔离。
6)标准共阳单脉冲接口。
7)脱机保持功能。
8)半密闭式机壳可适应更严苛环境。
9)提供节能的自动半电流锁定功能。
电气性能见表7-16。
表7-16 电气性能(环境温度Tj=25℃时)
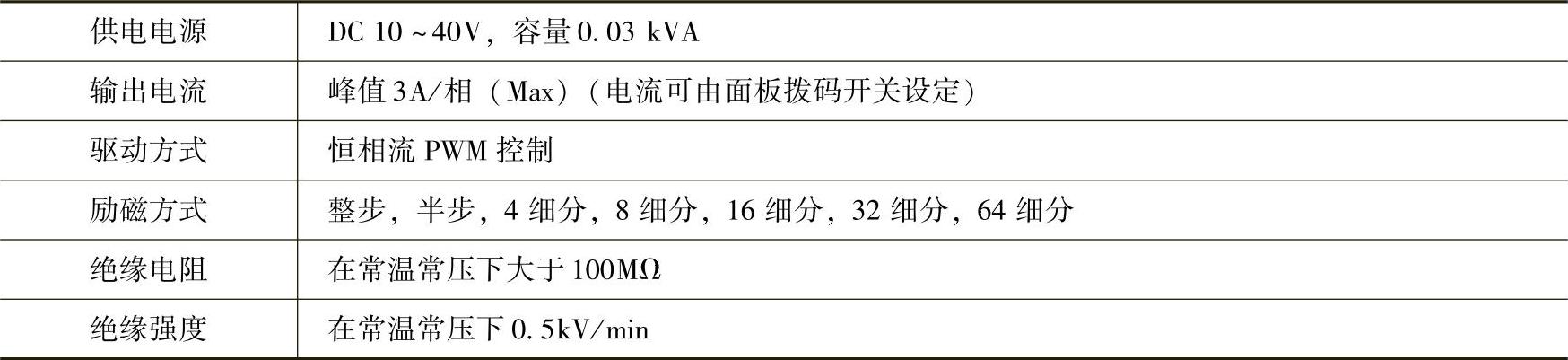
功能及使用
电源电压:驱动内部的开关电源可根据情况在DC 10~40V之间选择。总体说较高的额定电压有利于提高电动机的高速力矩,但也会加大驱动器的耗能和温升。
输出电流选择:此驱动器最大输出电流值为3A/相(峰值),通过驱动器面板上六位拨码开关的第5、6、7三位可组合出8种状态,对应8种输出电流0.9~3A(见表7-17)以配合不同的电动机使用。
表7-17 电流选择

细分选择:此驱动器可提供整步、改善半步、4细分、8细分、16细分、32细分和64细分7种运行模式,利用面板上六位拨码开关的第1、2、3三位可组合出不同的状态(见表7-18)。
自动半电流:如果上位控制机在半秒钟内没有发出步进脉冲信号,驱动器将自动进入节电的半电流运行模式,电动机绕组的相电流将减为设定值的一半。这种状态下电动机和驱动器的功耗得以降低,且电动机的输出力矩也相应下降。在下一个脉冲到来时驱动器自动恢复输出电流为额定值。
表7-18 细分选择

错相保护:此驱动器还具有错相保护功能,当接线发生错误时,只表现为电动机运行不正常,即电动机的出力极小。
驱动器的接线
公共端:该输入端采用共阳接线方式,将输入信号的电源正极连接到该端子上,将输入的控制信号连接到对应的信号端子上。控制信号低电平有效。
脉冲信号输入:共阳极时该脉冲信号下降沿被驱动器默认为一个有效脉冲,并驱动电动机运行一步。为保证脉冲信号的可靠响应,脉冲低电平持续时间不小于10μs。方向信号输入:该端信号的高电平与低电
平控制电动机的正、反两个转向。该端悬空被
等效认为高电平输入。
脱机信号输入:该端接收控制机输出的高/低电平信号,共阳极时低电平时电动机相电流被切断,转子处于自由状态(脱机状态)。共阳极时高电平或悬空时,转子处于锁定状态。
信号接线图如图7-55所示。
注意:在系统接线时应遵循功率线(电动机相线、电源线)与弱点信号线分开的原则,以避免控制信号线被干扰。
输入接口电路如图7-56所示。
注意:当控制信号不是TTL电平时,应根据信号电压大小分别在各输入信号端(非公共端)外接限流电阻。
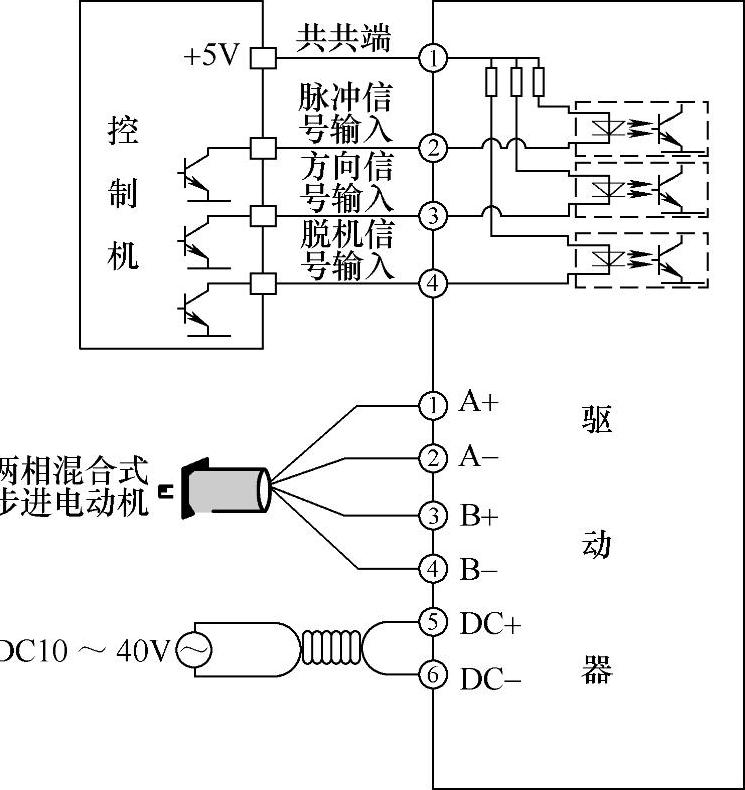
图7-55 信号接线图
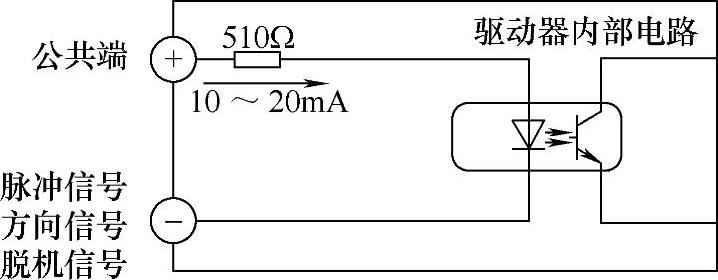
图7-56 输入接口电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。