



PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法。它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法,所得到的控制器参数,都需要在实际运行中进行最后调整与完善。
1.数字PID控制算法的参数选择
数字PID控制算法的参数选择一般根据被控过程的特性、采样周期的大小、工程上其他具体要求等来确定PID参数,现在一般采用的是临界比例法。利用该方法进行PID控制器参数的整定步骤如下:
1)首先预选择一个足够短的采样周期让系统工作。
2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数Kk和临界振荡周期Tk。
3)计算控制度;
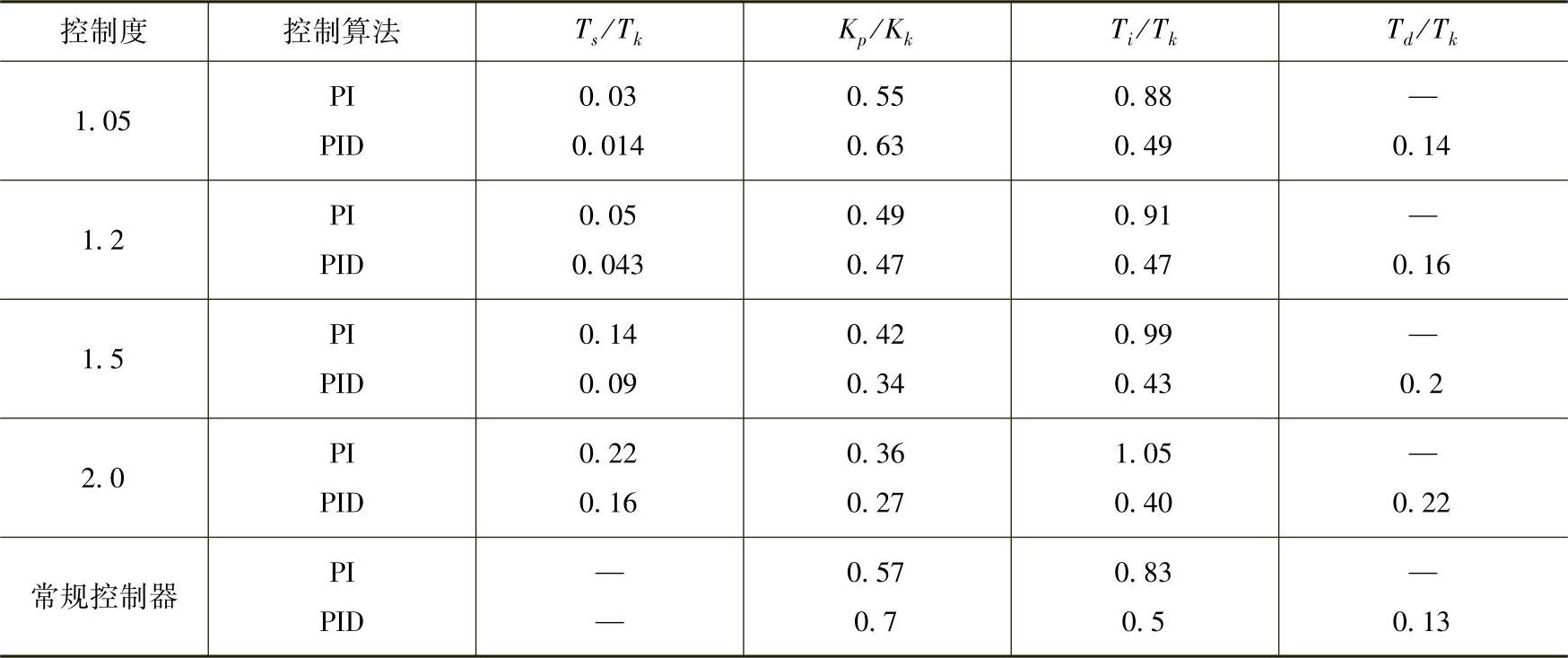
4)通过公式计算得到PID控制器的参数,计算方法见表5-13。
控制度一般很难求出,可以在表5-13中选取不同控制度的几组参数分别检验控制的效果,然后择优选用。
表5-13 临界比例法PID参数计算表
2.PID参数的经验数据
PID控制器参数的工程整定,各种调节系统中PID参数的经验数据可以参照如下:
温度T:P=20%~60%、Ts=10~20s、TI=180~600s、TD=3~180s;
压力P:P=30%~70%、Ts=3~10s、TI=24~180s;
液位L:P=20%~80%、Ts=6~8s、TI=60~300s;
流量L:P=40%~100%、Ts=1~5s、TI=6~60s。
注:P:比例带;TI:积分时间;TD:微分时间;Ts:采样周期。
根据经验方法,PID参数可以按以下公式计算:Kp=1/P,Ki=Kp*Ts/TI,Kd=Kp*TD/Ts,将计算值作为PID参数调整的初始值,根据控制效果反复修改参数,使系统达到相对最佳的控制效果。
3.PID参数整定口诀
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大弯,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢,微分时间应加长;
理想曲线两个波,前高后低四比一;
一看二调多分析,调节质量不会低。
4.三菱FXPLC的PID指令
(1)指令格式PID指令将当前过程测定值[S2]与目标设定值[S1]之差送到PID环中运算,得到当前输出控制值送到[D]目标寄存器。
[S3]指定PID运算的参数表的首地址。参数表占用25个数据寄存器,因此首元件地址号不可大于D7975。(https://www.xing528.com)
本指令可多次使用,但注意各PID环占用的数据寄存器不可重复使用。
PID指令的出错标志是M8067,相应的出错码存放在D8067。
PID指令格式如图5-25所示。

图5-25 三菱FX PLC的PID指令格式

(2)PID指令参数表PID指令的参数表占用了[S3]指定开始的连续25个数据寄存器,使用停电保持型数据寄存器以保持所有参数。PID参数表中一部分必须由用户在PID运算前通过MOV指令等预先写入,一部分留作内部运算用,还有一部分用于存放运算结果。
[S3]采样时间(Ts)
采样时间Ts的最大误差-(1扫描周期+1ms)~+(1扫描周期)。Ts的数值较小时,这种误差将成为问题。在这种情况下,请执行恒定扫描模式或在定时中断程序中编程。采样时间Ts≤PLC的1扫描周期,则M8067=ON,D8067=K6740,并按Ts=PLC的1扫描周期执行PID运算。在这种情况下,建议在定时中断中使用PID指令。
[S3]+1动作方向(ACT)(功能设置见表5-14)
表5-14 PID指令功能设置表
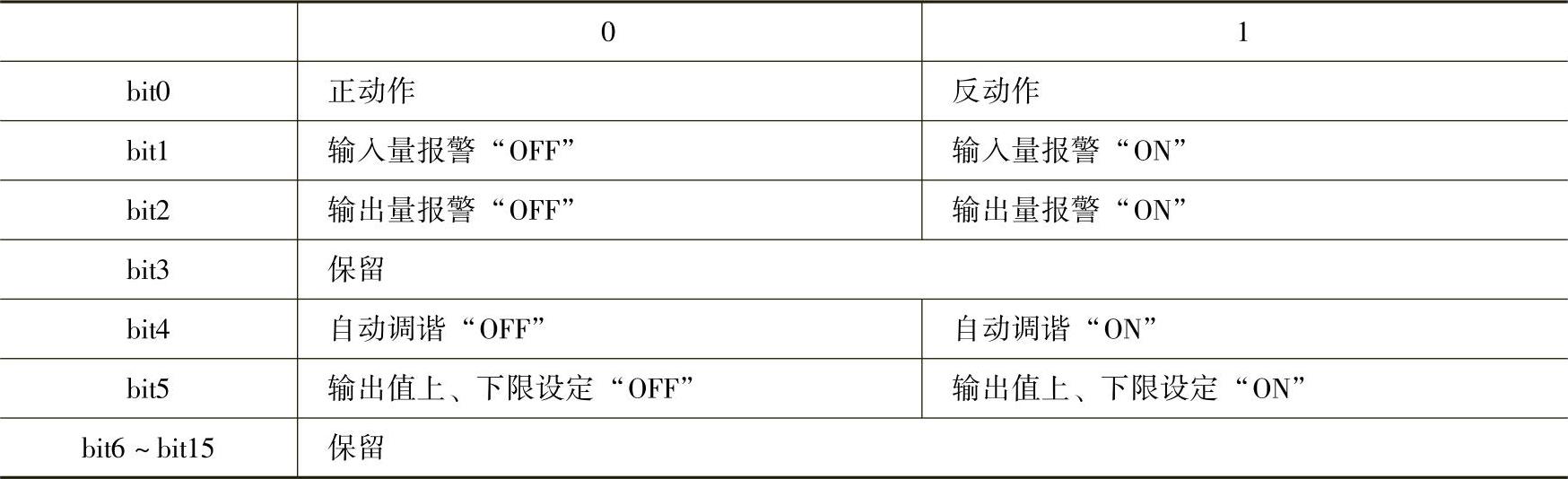
正动作是指当前过程值PV大于设定值SV时动作,反动作是指当前过程值PV小于设定值SV时动作。
[S3]+2输入滤波常数(α)0~99(%)0时没有滤波时间
输入滤波使测定值变化平滑。
[S3]+3比例增益(KP)1~32767(%)
[S3]+4积分时间(TI)0~32767(×100ms)0时作为∞处理
[S3]+5微分增益(KD)1~100(%)0时无微分增益
[S3]+6微分时间(TD)3~32767(×10ms)0时无微分处理
[S3]+7~[S3]+19 PID运算内部处理
[S3]+20过程量最大增量值0~32767
[S3]+21过程量最大减量值0~32767
[S3]+22输出增量报警设定值0~32767
另外,输出上限设定值-32768~32767
[S3]+23输出减量报警设定值0~32767
另外,输出下限设定值-32768~32767
[S3]+24报警输出
bit0输入增量溢出
bit1输入减量溢出
bit2输出增量溢出
bit3输出减量溢出
注:[S3]+20~[S3]+24使用的有效与否由用户设定的[S3]+1(ACT)中K2~K7设置情况决定。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。