



【摘要】:电动机的正转和反转接触器严格要求不能同时得电,因此需要在梯形图中实现两个输出继电器的“互锁”。自锁是用自身的常开触点实现,而互锁是用对方的常闭触点实现。注意,对于电动机正反转等同时得电会造成事故的环节,严格要求互锁,不仅在程序中要求互锁,在外部连线上也必须互锁。也就是两个接触器的线路里还必须硬件互锁。
【实例2】在用PLC来控制异步电动机时,常常会用两个输出继电器分别控制一个电动机的正转和反转接触器,即分别完成正转和反转。电动机的正转和反转接触器严格要求不能同时得电,因此需要在梯形图中实现两个输出继电器的“互锁”。
这里输入/输出元件较多,需要建立一个正反转控制I/O(输入/输出)分配表,见表2-1。
表2-1 正反转控制I/O分配表

正反转控制梯形图如图2-6所示。
从图2-6可以看出,当按下正转按钮后,电动机正转,如要反转,需要先按下停止按钮,再按下反转按钮,电动机才能反转。如果在电动机正转过程中出现误动作,直接按下了反转按钮,由于Y0的常闭触点串在Y1的线路上,就使得Y1不能得电,这就保护了电动机不因误动作而损坏。自锁是用自身的常开触点实现,而互锁是用对方的常闭触点实现。(https://www.xing528.com)
注意,对于电动机正反转等同时得电会造成事故的环节,严格要求互锁,不仅在程序中要求互锁,在外部连线上也必须互锁。也就是两个接触器的线路里还必须硬件互锁。
在这个控制环节里,我们看到,用以完成线路“接通”的功能往往使用常开触点,而且多个常开触点采用并联;用以完成线路“断开”的功能往往使用常闭触点,而且多个常闭触点采用串联。
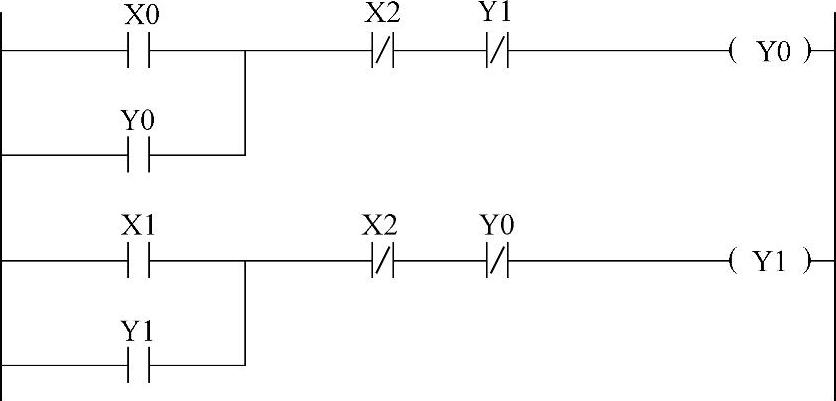
图2-6 正反转控制梯形图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。