



逆变器并联的控制方法,总体而言有两种方式:有互连线的控制方式和无互连线的控制方式,下面分别进行介绍。
5.3.1.1 有互连线并联控制
有互连线并联控制是早期逆变器并联控制的主要方案,从具体结构上又分为集中式并联控制、主从式并联控制和分布式并联控制等。
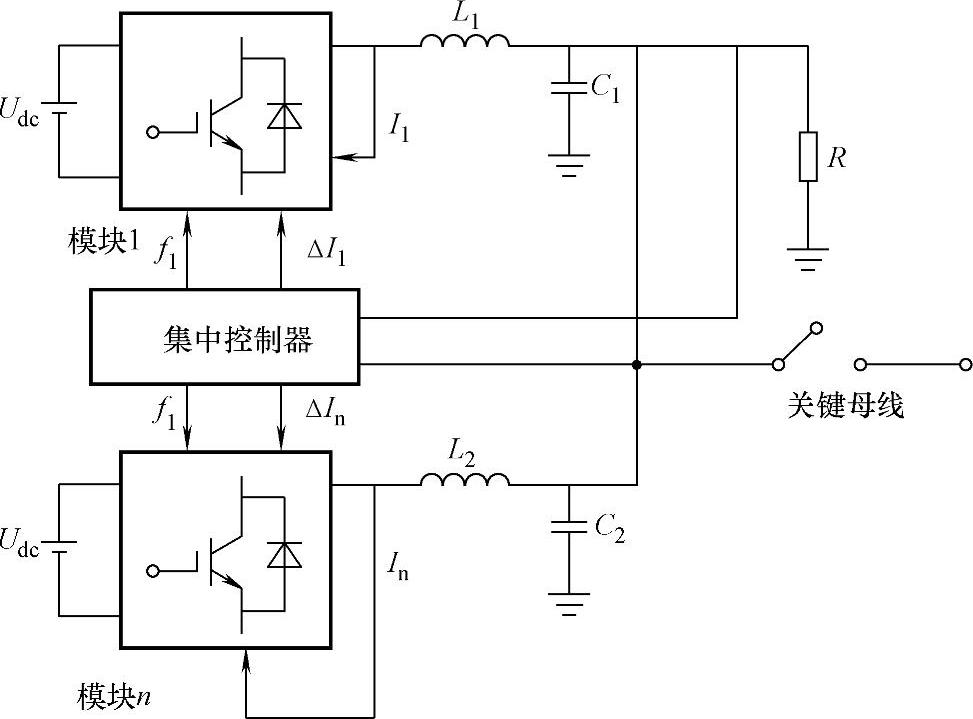
图5-14 集中式并联控制原理框图
1.集中式并联控制
在逆变器并联技术发展的早期,一般采用带有集中控制器的逆变器并联集中控制方法,其原理框图如图5-14所示。集中控制的特点是存在着一个集中控制器,该控制器的锁相环电路用于保证各模块输出电压频率和相位与同步信号相同。同时并联控制单元还要负责检测总负载电流,将负载电流除以并联单元的个数作为各台逆变电源的电流指令,同时各台逆变电源检测自身的实际输出电流,求出电流偏差。假设各并联模块单元每一个同步信号控制时输出电压频率和相位偏差不大,可以认为各并联单元的输出电流偏差是由电压幅值的不一致而引起的,这种控制方式把电流偏差作为参考电压的补偿量引入各逆变电源模块,用于消除输出电流的不均衡。
集中控制方式比较简单,易于实现,且均流效果较好。但是,集中控制器的存在使得系统的可靠性有所下降,一旦控制器发生故障将导致整个供电系统的崩溃。
2.主从式并联控制
为了解决集中控制方式的缺点,提出了主从式并联控制方式,其原理框图如图5-15所示。
主从控制方式是通过一定的逻辑选择来确定一台模块作为主机,当主机退出系统时,另一台从机自动地切换为主机,执行主机的控制功能。这种控制方法的原理与集中控制是一样的,只是避免了由于主控制器出现故障时整个系统的崩溃。因此,这种方式提高了系统的可靠性。
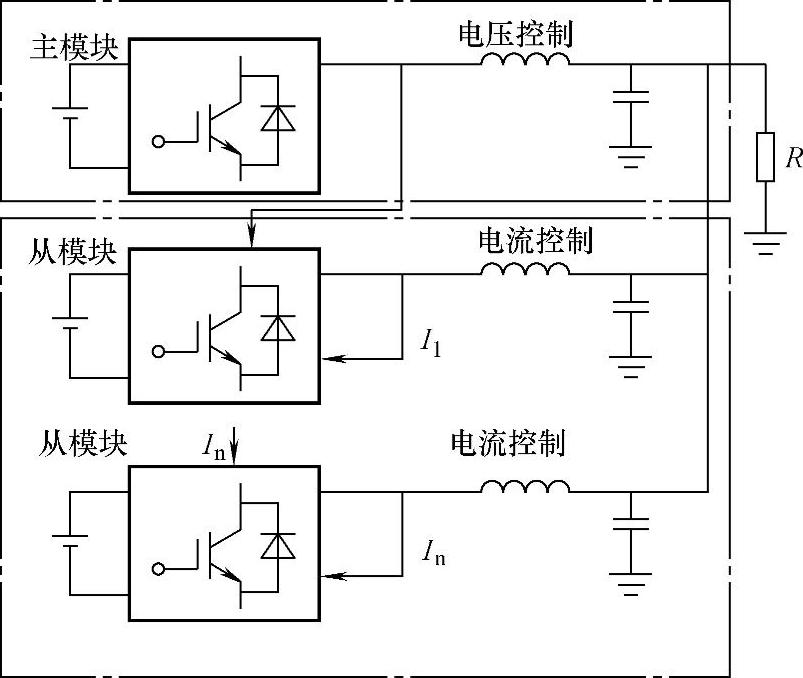
图5-15 主从式并联控制原理框图
在一些主从式并联控制系统中,正常运行时只有主机存在电压闭环控制,从机内部没有电压闭环,从机接收主机的电压环输出信号作为电流环的电流指令,因此从机中只有电流环起作用,主机是电压控制型逆变电源,而从机是电流控制型逆变电源。
主从式并联控制中还有以并联逆变器输出功率的特性为基础,利用有功功率和无功功率来调整各逆变器输出电压的相位和幅值来实现逆变器的同步并联运行。主从控制方式解决了单个逆变器出现故障引起整个系统崩溃的问题,但是由于存在主从切换的问题,因此主从式并联控制中确定主机的逻辑选择方法至关重要,直接影响系统的可靠性,一旦主从切换失败,必将导致系统的瘫痪。
针对主从式并联控制所存在的缺陷,又出现了互动跟踪多点同步轮主式并联均流控制策略。该控制方式中没有固定的主模块,每个模块在每个工频周期内都按着一定的频率同时向同步母线上发送本模块的同步脉冲,实现多点同步,提高了同步精确度。各模块在发送本模块的同步脉冲的同时,随时检测同步母线上的信号,根据同步信号调节本模块同步脉冲,并由同步信号强制各正弦基准同步工作,使各个模块间的同步脉冲互相跟踪,形成一种公共的同步信号,实现了各模块的同步。同时利用模块间的电流信息交换修改参考电压的幅值,实现均流控制。这种分布式无主从控制的逆变器并联方法,可以实现并联系统的N+1冗余,增强了系统的可靠性。
3.分布式并联控制
为了实现逆变电源的真正冗余,即并联系统中的每一台逆变器单元的运行都不依赖于其他的逆变器单元,各模块单元在并联系统中地位相同,没有主次之分,于是提出了一种分布式并联控制方式。如图5-16所示为分布式并联控制系统的原理框图。
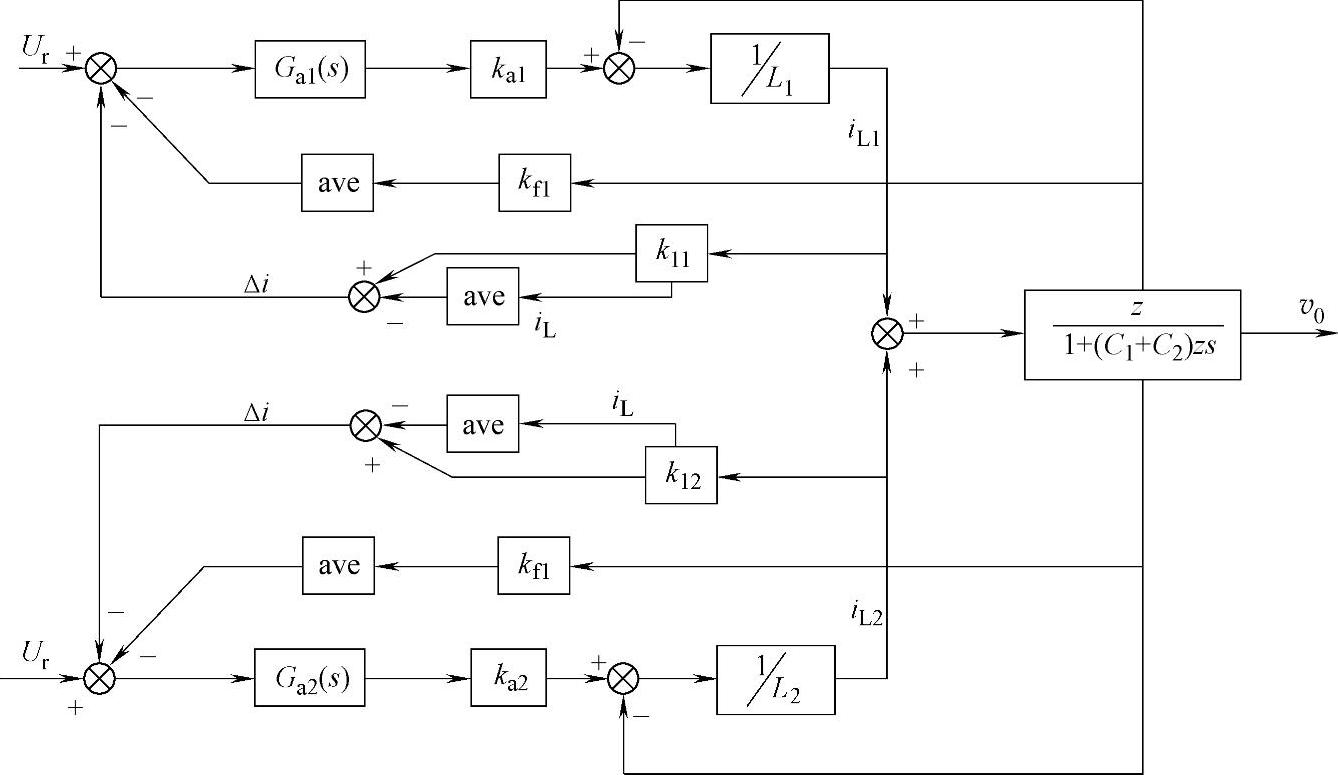
图5-16 分布式并联控制系统的原理框图
分布式并联控制方案采用三个平均信号作为逆变器之间的并联总线信号,从这个框图中可以看出分布式系统的一般特点。图中ave是一个求平均值的电路,通过这个电路,逆变器之间的反馈电压值、参考电压Ur及反馈电流的平均值都被用于每个逆变器的控制,各个逆变器的控制功能完全一致,投入或者切除一个逆变器模块对系统来说不需要额外的逻辑判断,适合并联系统的冗余和维护。在分布式并联系统中,各台逆变器单元的地位是相等的,当检测到某台逆变器发生故障时,可以控制该逆变器单元自动的退出系统,而其余的逆变器不受影响。分布式控制的并联系统解决了集中控制和主从控制中存在的单台逆变器故障导致整个系统瘫痪的缺点,使并联系统的可靠性大大地提高。同时,该分布式并联控制方式具有控制原理简单、易于实现和均流效果好等特点,在并联台数不多的情况下采用这种方式比较实用。
分布式控制方案虽然可以使系统以较高的可靠性运行,但是随着并联系统中逆变器数量的增加,逆变器之间的互连线增多,将使整个系统变得复杂。同时,随着各台逆变器之间距离的增大,使逆变器之间的互连线增长,均流信号容易引入干扰,降低了系统的可靠性,尤其是采用模拟控制时,由于连线距离较远,干扰更为严重。因此,有些公司专门研制了采用光纤进行通信的完全无电气互连线的并联方式,提高了分布式并联系统的可靠性,但同时也增加了系统的成本,使控制系统更加复杂。为降低系统的复杂程度,提高并联系统的可靠性,可对分布式并联控制方式进行改进。即只采用一根传输逆变器输出电流平均值信号的均流母线和一根同步信号总线,减少了并联系统互连线的数量。
在改进的分布式逆变器并联系统中,同步采用独立的电路实现,输出电流平均值采用模拟电路实现,并通过均流母线传输给各个模块,其控制电路框图如图5-17所示。在这种控制方式中,各模块的输出电流采样信号经平均值电路得到每个逆变器所需承担的平均负载电流信号,并与自身的电流比较,将偏差信号反馈给电压瞬时值调节器,从而实现环流的闭环控制。为了提高并联系统的稳定性和静态均流效果,均流控制单元还将在环流与输出电压综合后调节基准正弦信号的幅值。同步电路要求每个模块都向同步总线上发送同步信号,并从总线上接收第一个到来的同步信号,使各模块跟踪第一个到来的同步信号,各模块没有主次之分,都处于相同的地位,有利于实现热插拔而不影响并联系统运行,可以实现系统的冗余。
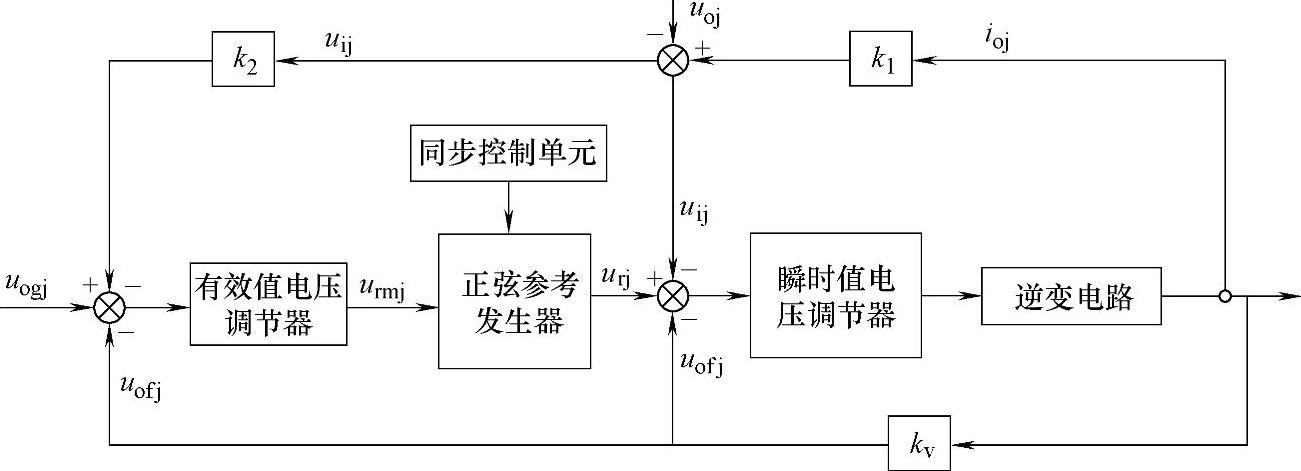
图5-17 改进的平均值分布式并联控制系统图
分布式并联控制系统是通过并联模块间的互连线来实现稳压和均流的,其控制原理是将控制权分散,在逆变电源并联运行时,各个电源模块检测出自身的有功功率和无功功率,通过均流母线传送到其他并联模块中,与此同时电源模块本身也接收来自其他模块的有功功率和无功功率信号进行综合判断,确定本模块的有功功率和无功功率基准。有功功率用来调整相位,无功功率用来调整幅值。这样就可以根据模块间的有功功率和无功功率信息来调整自身的电压和同步信号的参考值,实现并联系统的均流控制和相位同步。
5.3.1.2 无互连线并联控制
无互连线并联控制方法的模块间仅有交流母线相连,各模块相互独立,可实现完全的冗余。因此,无互连线的逆变器并联控制受到了广泛关注。目前,无互连线并联控制主要采用下垂特性法。下垂特性法来源于电力系统的并网运行,在5.2节中已经进行了详细的介绍。在逆变器并联控制中的下垂特性法有自己的特点,下面以两台逆变器并联为例进行介绍。
两台逆变器并联运行原理图如图5-18所示。为方便起见,将逆变器简化为交流电源。其中,U01和U02为逆变器输出电压幅值,φ1和φ2为逆变器输出电压相位,R1和R2为线路等效电阻,X1和X2为线路等效电抗,Z0为输出负载。分析时假设R1=R2,X1=X2。U0∠0°为交流母线电压,也即负载两端电压;I01和I02则为逆变器输出电流幅值,I0为负载电流幅值。
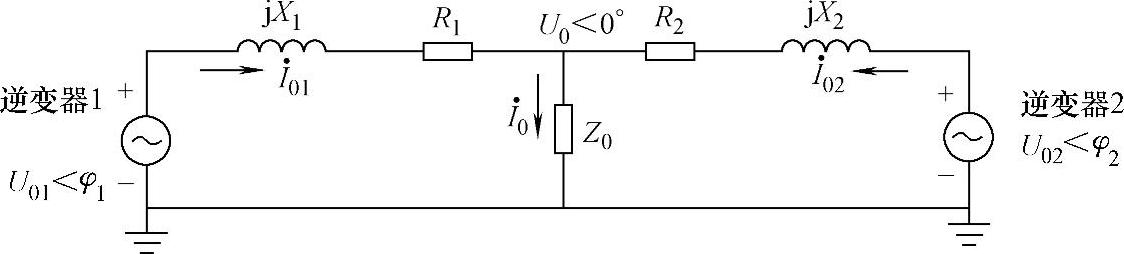
图5-18 两台逆变器并联运行原理图
根据图5-18,逆变器1的输出电流为
 (https://www.xing528.com)
(https://www.xing528.com)
一般线路电阻很小,即R1<<X1,可忽略不计,则式(5-29)可简化为

因此,逆变器1的输出复功率为

将式(5-30)代入式(5-31),有
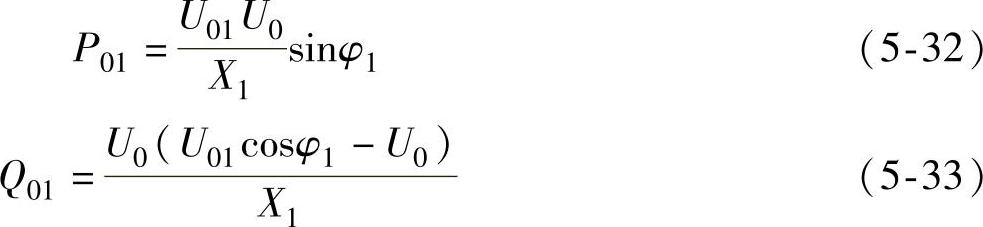
一般来说,φ1很小,所以sinφ1≈φ1,cosφ1≈1;则式(5-32)、式(5-33)简化为
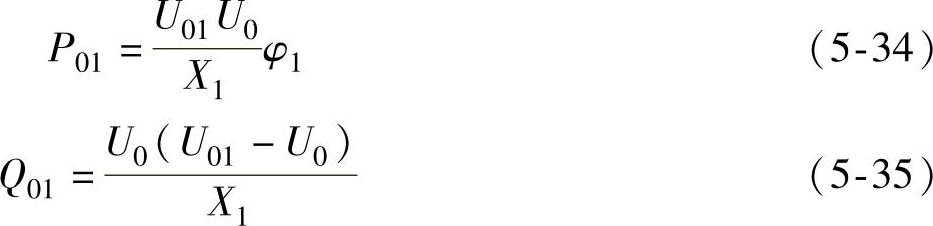
由式(5-34)可见,有功功率P01是输出电压幅值U01和相角φ1的函数,取微分,可得

由于φ1很小,所以忽略φ1·ΔU01和ΔU01·Δφ1,有

同理可得

由式(5-37)和式(5-38)两式可知,输出电压的相位变化影响其输出有功功率的变化,而输出电压的幅值变化则改变其输出的无功功率。由式(5-34)和式(5-35)可知,相位超前越多的模块,输出的有功功率也越大;幅值越大的模块,输出的无功功率则越大。因而,如果要控制逆变器输出的有功功率和无功功率只需通过调节逆变器的输出电压的幅值和相位即可,一般通过调节输出电压的频率ω来改变输出电压的相位,进而调节逆变器的输出有功功率。这就是下垂特性法的基本思想,其控制方程式为
ω=ω0-mP (5-39)
U=U0-nQ (5-40)
式中,ω0、U0分别为逆变器空载时的频率和电压;m、n为下垂系数。
式(5-39)和式(5-40)对应的曲线如图5-19所示,为典型的下垂特性。
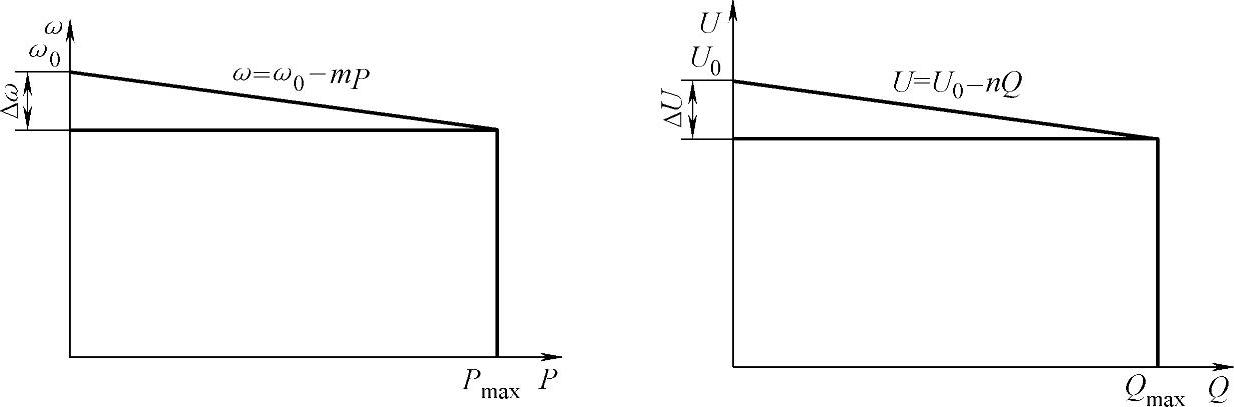
图5-19 逆变器下垂特性曲线
由图5-19和式(5-39)、式(5-40)可知,对于输出有功功率大的逆变器,通过下垂算法其频率将变小,因此相位也将减小,从而使有功功率的减小,达到有功功率的平衡;对于输出无功功率大的模块,通过下垂算法,其幅值将减小,进而引起无功功率的下降,达到无功功率的平衡。
5.3.1.3 两种控制方法的比较
无互连线控制方法与有互连线控制方法相比,具有以下优势:
1)模块化程度更高。由于无互连线并联的各模块间没有信号线相连,各个模块间完全独立,是一种完全冗余的并联,其模块化程度更高。
2)可靠性更高。由于模块间没有关联,因此单个模块的故障不影响系统的工作,大大提高了系统的可靠性。
3)易扩容和维护。模块间相互独立,因此系统进行容量扩展相当方便,同时维护某个模块也极为便利。
4)应用前景更广泛。有互连线并联的模块间的相互连线是一个不稳定因素,因为一旦连线出现故障,系统也会受到影响。另外,相互间的连线会给系统带来噪声,影响供电质量,同时也限制了模块的空间。所有这些缺点无互连线控制都不存在,因此无互连线控制的应用前景更被看好。
无互连线控制方法也有下列一些缺点:
1)控制策略复杂。要达到较高的均流度,经典PQ法还不够,因此还必须引入一些复杂的控制,如PI、PD等,以及对P、Q等进行低通滤波等。
2)成本较高。目前的无互连线并联都是在数字控制的基础上实现的,模拟控制行不通,而有互连线并联则可以通过模拟控制来实现。并且无互连线控制对数字芯片的运行速率、采样速率和精度也有较高的要求,一般的数字芯片(如单片机)不能胜任,目前主要是用DSP芯片来实现,这使得系统的成本相对较高。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。