



虽然PLC输入信号没有错,模拟量输入偏差也不大,PLC处理后,得出控制输出也正确,但如果PLC输出控制的执行机构没有按要求动作,这些也会使系统出现错误。
为此,在提高输入可靠性的同时,也要提高输出执行动作的可靠性。一旦出现错误,PLC应及时发现,及时报警。
1.输出执行错误
输出执行错误与系统的执行机构有关,如:
1)控制负载的接触器不能可靠动作,虽然PLC发出了动作指令,但执行机构并没按要求动作。
2)控制变频器起动,由于变频器自身错误,变频器所带电机并没按要求工作。
3)各种电动阀、电磁阀该开的没能打开,该关的没能关到位。
……
2.处理输出执行错误监控
有两种方法:一是用“看门狗”;另一是用动作反应检测。这两个方法本质上是相同的,只是,一个看在给定的时间内动作完成了没有;一个不太考虑延时,只看动作执行了没有。
(1)“看门狗”
英文称Watchingdog。其机理是起动一个动作后,如系统工作正常,经若干时间总会完成的,完成总有反馈信号,总会有转入下一步动作的信号。“看门狗”就是定时器,在起动一个动作的同时,也将其启动,给定的时间到仍无完成反馈信号,即说明出现错误,进而可报警或记录。可记下出错误的时间及那个动作,以备诊断。图7-5为这种监控的PLC梯形图程序。
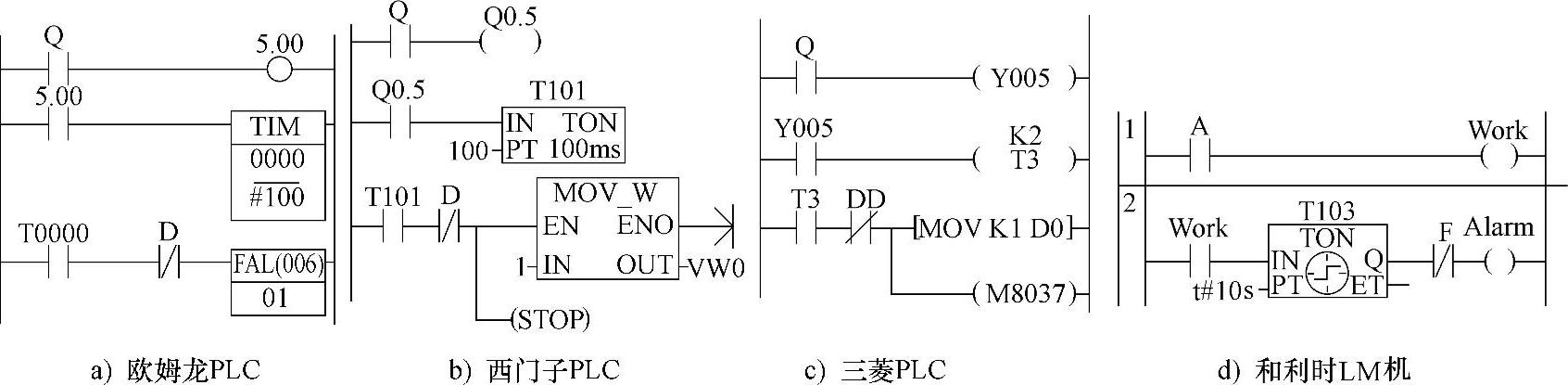
图7-5 输出监控1(https://www.xing528.com)
从图7-5可知,Q(图7-5d为A)起动动作5.00(或Q0.5,或Y005,或Work)的同时,把TIM0000(或T101,或T3,或T103)功能块也同时起动。这里的定时值设为10s。若10s内反馈信号D(图7-5c为DD、图7-5d为F)到来,则不执行后续指令。不然,对图7-5a,将执行FAL指令。PLC的ALARM(报警)灯闪烁,并于253(对C系列机而言)通道的低字节记01(错误号)。对图7-5b,将执行MOV-W及STOP指令,对图7-5c将执行MOV及使三菱PLC强制PLC停机的特殊继电器M8037ON。这将把错误标志1存入VW0或D0中,同时使PLC停机,以确保系统安全,对图7-5d是“Alarm”ON,报警。
如果要把错误的时间、错误号记入数据区,可用上述数据采集的方法进行。这里略。
(2)动作反应检测
图7-6为PLC有关程序。
从图7-6可知,当动作起动后,它即起动定时器,同时等待动作的反应。如图,若5.00(或Q0.5,或Y005,或Work)用于起动接触器,即5.00(或Q0.5,或Y005,或work)ON,接触器合。合后必有反应。如这里用了F,代表它的常闭触点。从图知,从5.00(或Q0.5,或Y005,或Work)ON或OFF后到接触器反馈信号F入,其间只要小于10s,将不报警或停机。若超出,则报警或停机。
西门子PLC搞输出热备,用的即为这个思路。它把这里的F称回读(Readback)信号。但信号从5.00(或Q0.5,或Y005)输出处读取,不从接触器处读取。因为,它监视PLC有无错误,而不是接触器这样执行元件。
其实,图7-5与图7-6逻辑关系并无两样。只是一个利用正常动作转换进行时间监控,而另一个是判断这里ON、OFF控制输出能否及时实现。一旦出了问题,如本例限10s,就可知道问题出在哪儿,记录的时间也正是出事的时间。这就是说,它不仅可检测到错误,而且还可进行错误定位。
3.误动作避免
有时,在特定的情况下出现某种输出是不允许的。这时,可把这种输出视为误输出,在逻辑上予以禁止,避免出现。此即这里讲的“误动作避免”。
一个实际例子是用PLC控制电梯工作。据讲,按前些日子统计,天津市在用电梯有4100多台种。采用PLC控制的电梯有562台。其中交流双速电梯采用日本欧姆龙公司生产的C系列PLC占多数。
电梯拖动控制采用交流接触器切换的方法,变换串接阻抗,实现电机的加、减速控制。其端站的安全保护采用机械式换速开关、限位开关及极限开关实现。此种设计尽管能满足运转需要,但在使用中可能出现接触器触点粘连、弹簧失效、触头不能复位、电器元件误动作、开关机械损坏等故障。故仍会发生“冲顶或蹲底”事故。为防止发生此类故障,除了提高施工质量和元器件质量外,该厂利用PLC中的定时器和继电器,借助PLC的故障诊断功能,用程序实现端站保护,弥补上述不足,从而提高电梯的可靠性。有关细节可向该厂咨询。
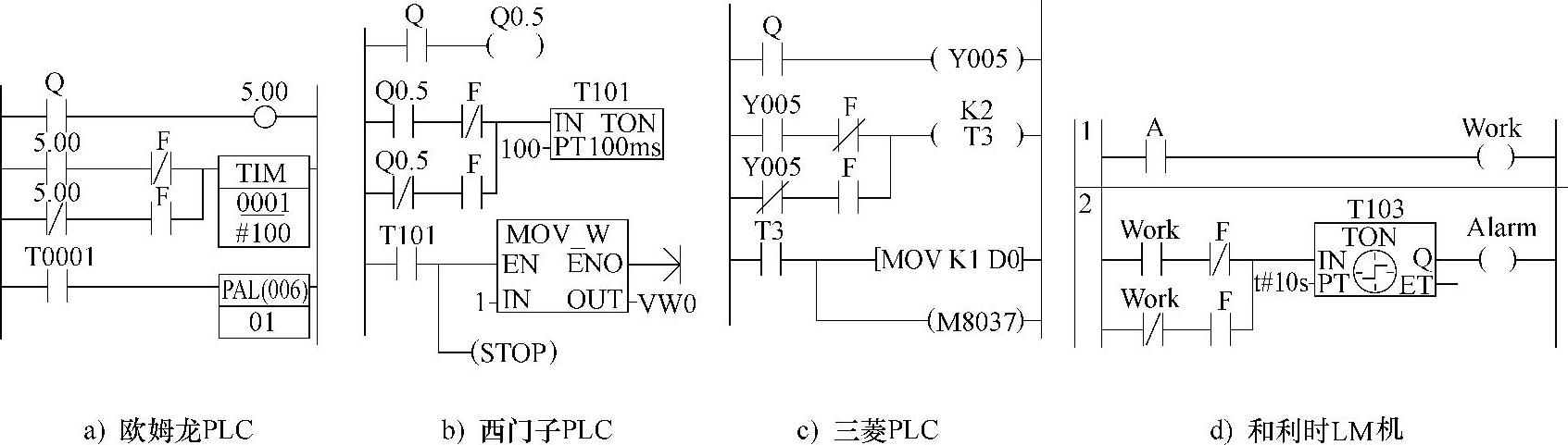
图7-6 输出监控2
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。