



程序控制是指使被调节量按预定规律变化所做的控制。这预定规律可根据要求任意设计。
以下为两个电动机速度程序控制实例。在使用时,还需把这里的模拟量输出做功率放大,以加载给直流电动机,或用输出控制变频器输出频率,用变频器加载给交流电动机。此输出可理解为0~5V或10V电压。此电压高,直流电压也高,或变频器的输出频率也高;用它驱动电动机时,电动机的转速也高。所以,控制此数值即可控制电动机速度。
控制要求如图4-20所示,即运动部件先作等加速度运动;增速到Max值时,速度保持这Max值,作等速运动;到总行程“行程快到”后,作等减速度运动;减速到Min值后,速度保持Min值,作等速运动,直到行程到“行程到”时,运动停止。
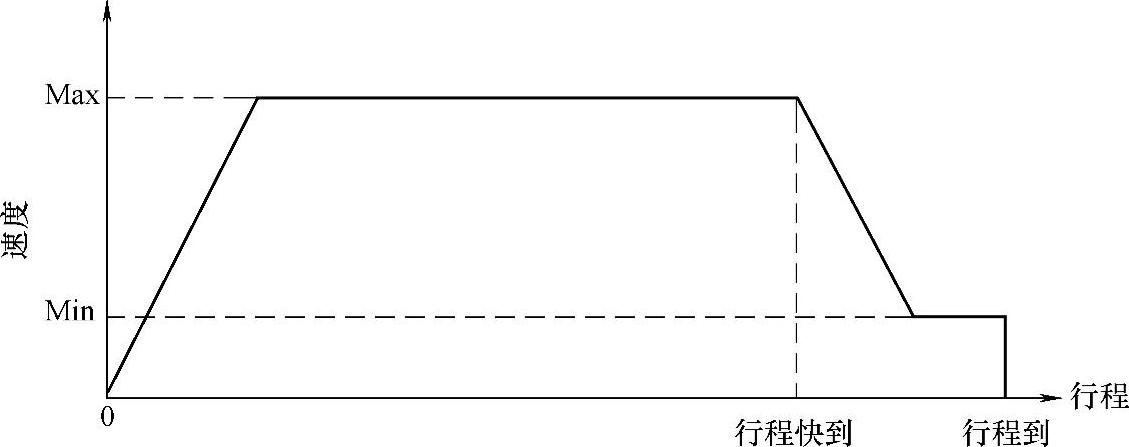
图4-20 运动速度与行程关系
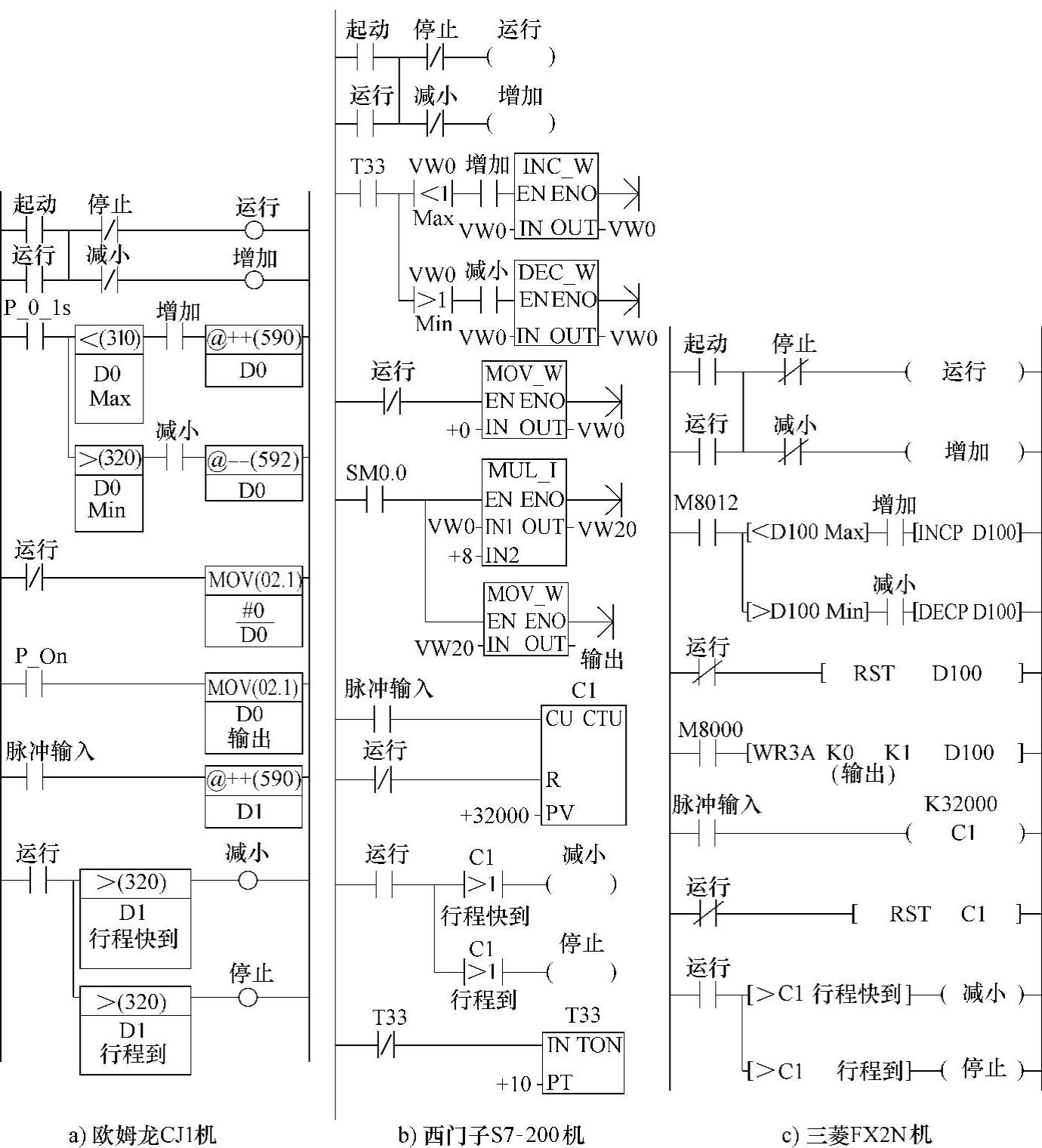
图4-21所示为三种PLC实现这个控制的程序。
为了便于说明,图中用的都是符号地址,且3种PLC的符号明均相同。如图4-21所示,“起动”信号ON后,“运行”将ON,并自保持。这时,由于“减小”OFF,其常闭触点ON,故“增加”ON。
“增加”ON,且D0或VW0小于Max时,将使100ms时间脉冲作用在加1(图4-21a为++,图4-21b、c为INC指令)十六进制数运算操作上,使数据存储器D0或VW0每经100ms,加1一次。而此D0或VW0的值总是传送给“输出”,因为它的传送条件总是P-ON、SM0.0或M8000,均为常ON特殊继电器。图4-21a用的都是十六进制数,直接传送;图4-21b考虑到模拟量输出为“左对齐”,故作乘8(左移3位)传送;图4-21c则根据模拟量模块访问的特点,用相应访问指令传送。这样,由于D0或VW0值的增大,“输出”也将随之增大,因而,所控制部件的速度将增速。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-21 电机速度控制程序
当D0或VW0增到Max值时,D0或VW0将保持Max值,不再增大。这时,部件将作等速运动。
当部件运动时,将产生“脉冲输入”信号。每输入一个脉冲,对于图4-21a程序,将使D1加1,图4-21b、c则使增计数器C1加1。
当D1或C1增加到等于或大于“行程快到”值时,“减小”ON,其常闭触点将使“增加”OFF。同时,当V0或VW0大于Min时,将使100ms时间脉冲作用在减1(图4-21a为--,图4-21b、c为DEC指令)十六进制数运算操作上,使数据存储器D0或VW0每经100ms,减1一次。这样,由于D0或VW0值的减小,“输出”也将随之减小,因而,所控制部件的速度将减速。
当D0或VW0减小到Min值时,D0或VW0将保持Min值,不再减小。这时,部件将作等速运动。
当运动到“行程到”值时,“停止”ON,其常闭触点将使“运行”OFF。D0、D1、C1或VW0回到0,整个控制完成。
另外,图4-21a的P-0.1s、图4-21c的M8012都是100ms的时间信号。而图4-21b中,S7-200无此特殊继电器,只好用定时器T33的常闭触点控制自身的线圈产生此信号。
应指出的是,本例的开环控制指的是速度控制。而行程控制还是闭环的。部件运动行程用脉冲输入反馈。如果运动速度较快,脉冲频率较高,还可用高速计数器处理此过程。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。