



1.分散控制算法要点
在本章第7节讲到流程图法编程,实质上也是分散控制。它们都是按反馈输入的情况一步步推进,各个步也都可按要求实现不同的控制输出。两者不同只是分散控制源于工程控制实践,而流程图算法源于计算机程序流程管理。
本章第7节介绍分散控制算法没有讲分支。其实正如流程图算法一样,它也可能有分支。有平行分支与选择分支,以至于更为复杂的分支。图2-56为平行分支的原理图。
从图2-56知,它的“动作2完成”信号将起动两个动作,“动作3”及“动作33”。起动后,这两个分支将平行工作。直到这里的“动作4完成”“动作44完成”信号都产生了,才能进入“动作5”。
从图2-57知,它的动作2完成后,有两个动作完成信号选择:“动作2完成A”与“动作2完成B。如得到是“动作2完成A”,则进入分支A,直到分支A完成。如得到是“动作2完成B”,则进入分支B,直到分支B完成。
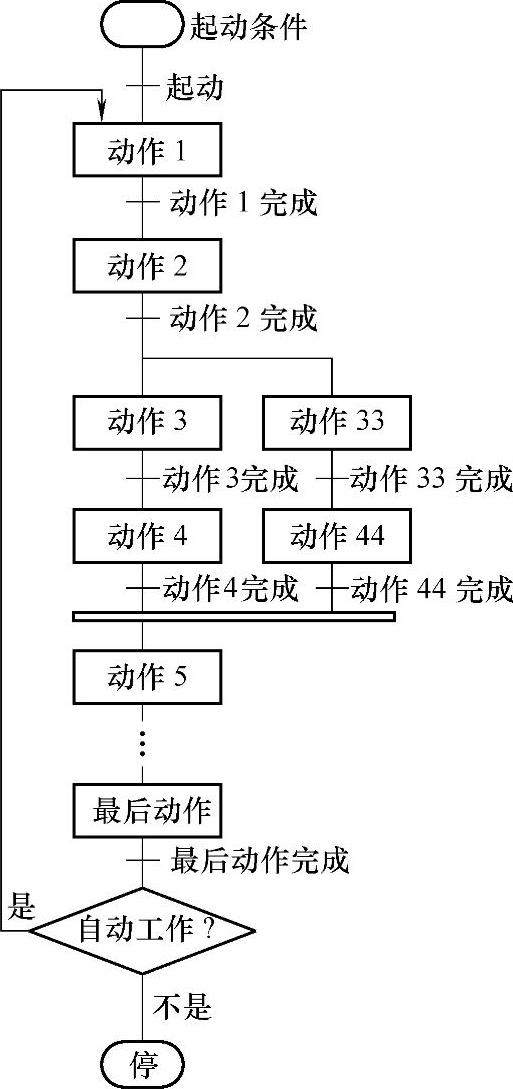
图2-56 平行分支框图
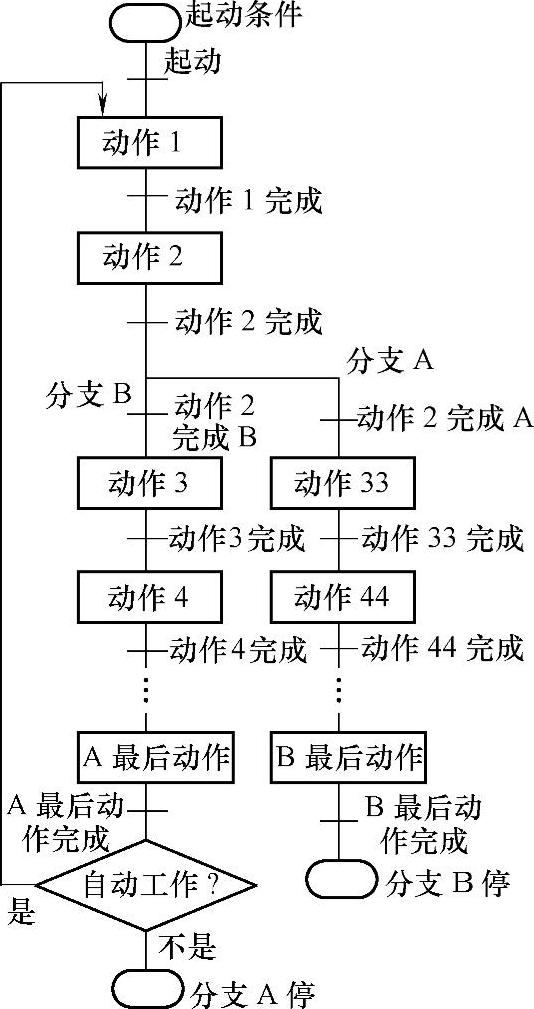
图2-57 选择分支框图
2.分散控制程序实现
分散控制的“动作”“步”或“动作完成”可以是实际输出、输入点,直接实现输出控制与得到输入反馈。也可不是实际输出点、输入点,通过转换间接实现输出控制与输入反馈。后者具有柔性,实现程序灵活,通用性强,易读,易改,是很值得提倡的设计。
(1)使用间接实现
所要做的工作有如下两个:
1)根据“动作”或“步”的数量,设计与其相等的“动作”或“步”的逻辑控制程序。
2)设计输入、输出转换程序。
(2)逻辑控制程序的实现方法
1)基本指令实现。其思路是,开始工作时先使第一步用的工作位ON,并保持。当第一步工作完成时,使第1步用的工作位OFF,同时启动第2步用的工作位,并使其保持ON。这样一步步推进,直到整个工作完成。具体程序略。
2)移位指令实现。本法的优点指令使用效率高,是在一定步数内(受移位字的限制),增加“步”数,控制输出程序量不增加。
3)步进指令实现。本章第7节流程图算法的程序实现用的就是此方法。程序单元化强,扫描时间也可减少。
4)SFC语言实现,是步进指令的进一步发展。图2-58所示为合理时PLC的相应程序。运行开始,先进入初始步(init)。当“start”ON,则进入“Step1”步。到了“Step1F”条件ON,则转入“Step2”步。以此类推。直到“Step4F”条件ON,则取决于“Auto”条件ON否,或转到“Step1”继续工作,或转到“init”等待新的命令。以下为它使用的变量声明:
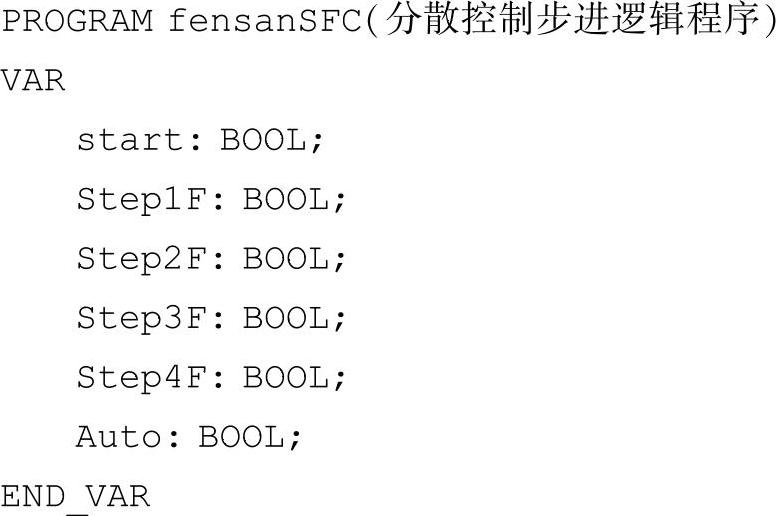
各个步(Step)的所执行的动作要另行编写。
(3)输入、输出转换程序
这在间接输入、输出控制时才用到它。这在本书第1章第6节典型程序中也已有介绍。以下应用实例中还将具体说明。
分散控制应用实例,用的是本章第3节的例3组合机床动力头运动控制,其要求与其完全一样。(https://www.xing528.com)
1)设计控制程序。结合本例,用6个“动作”的顺序控制程序。步进逻辑可采用以上介绍的任意一个,具体略。
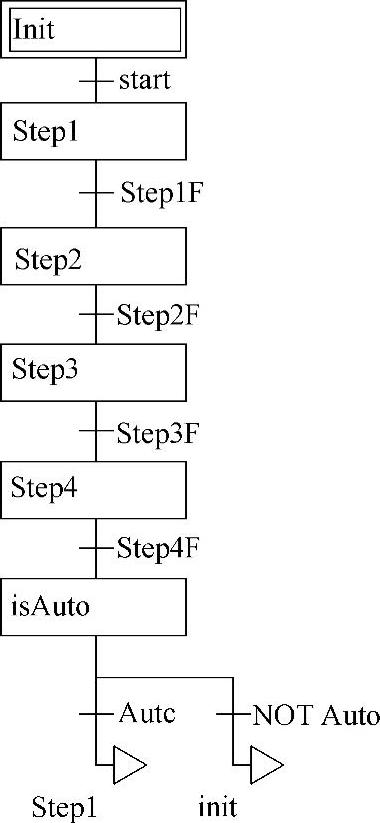
图2-58 SFC语言分散 控制程序
2)确定输入、输出组合逻辑。本例用间接输入、输出。实际地址用符号地址,如XK1、XK2、…、DT1、DT2。按要求,其输出与“动作”的关系为:
“动作1”“动作2”“动作4”“动作5”DT1应为ON,动力头前进。其它情况为OFF,动力头后退。
“动作1”“动作3”“动作4”“动作6”DT1应为ON,动力头快速。其它情况为OFF,动力头慢速。
其逻辑式应为
DT1=“动作1”+“动作2”+“动作4”+“动作5”
DT2=“动作1”+“动作3”+“动作4”+“动作6”
按要求,其输入与“动作完成”的关系为:
2XKON应产生与“动作1完成”信号;3XKON应产生与“动作2完成”信号;2XK OFF应产生与“动作3完成”信号;3XK再次ON应产生与“动作4完成”信号;4XKON应产生与“动作5完成”信号;1XKON应产生与“动作6完成”信号。
所以,其逻辑表达式应为
“动作1完成”=XK2
“动作2完成”=XK3
“动作3完成”=XK2非
“动作4完成”=XK3
“动作5完成”=XK4
“动作6完成”=XK1
“原位”=XK1
图2-59为相应的输入、输出逻辑梯形图。
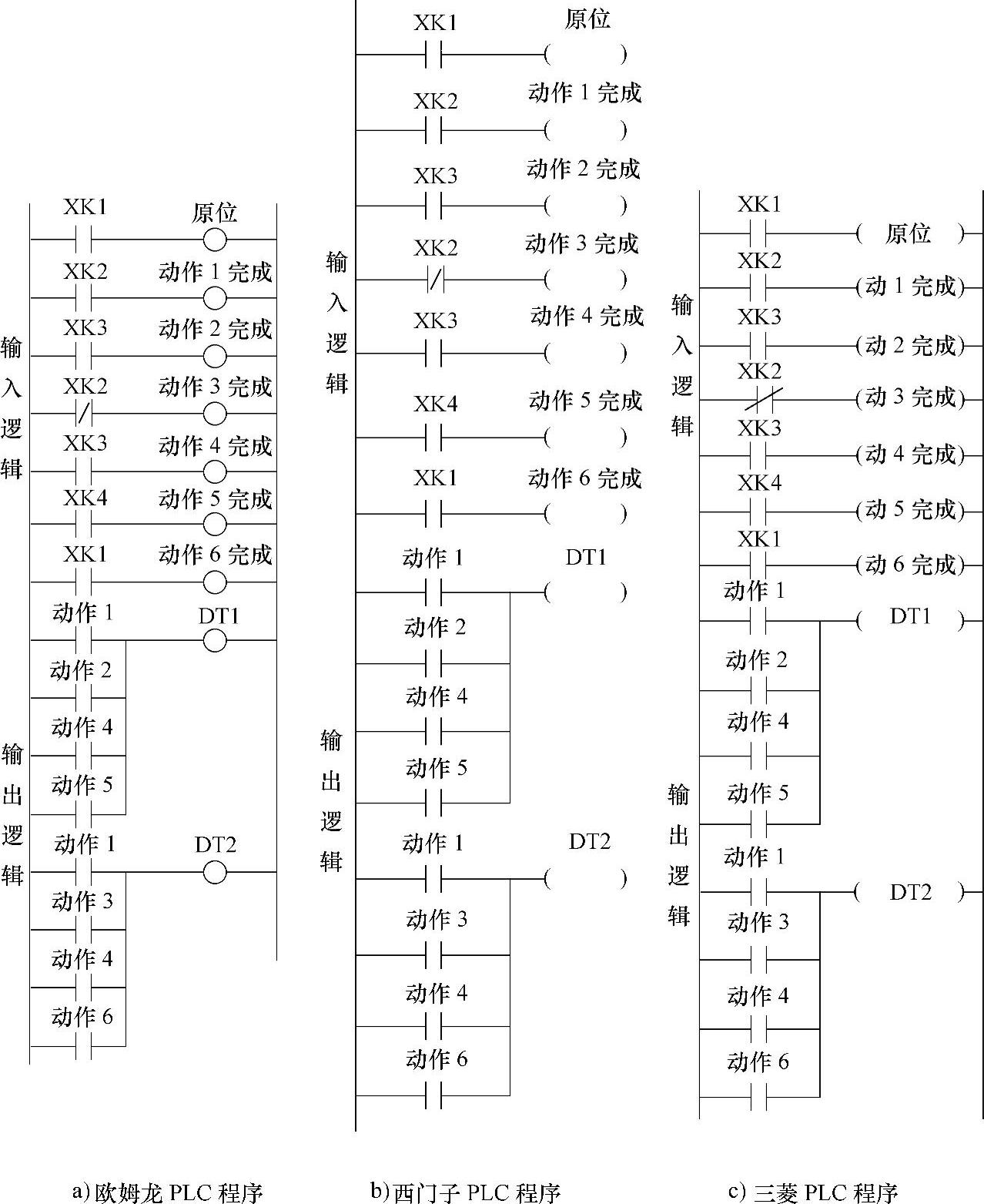
图2-59 输入、输出逻辑梯形图
有了步进逻辑程序加上这个转换程序,PLC运行后,即可实现所要求的控制功能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。