



1.流程图法设计要点
流程图由一系列框图、圆圈及其连线等几何图形组成,以表示各种不同性质的操作。方框代表动作;圆圈代表动作起始位与动作终了;连线代工作表流向;连线中间短线代表一个动作到另一个动作转换的条件。此外,有时也可用菱形表示流程的分支,不同条件有不同的工作流向。这种图,可以把控制对象的工作过程清楚地表示出来,是一种传统的计算机算法表示与程序设计的方法。
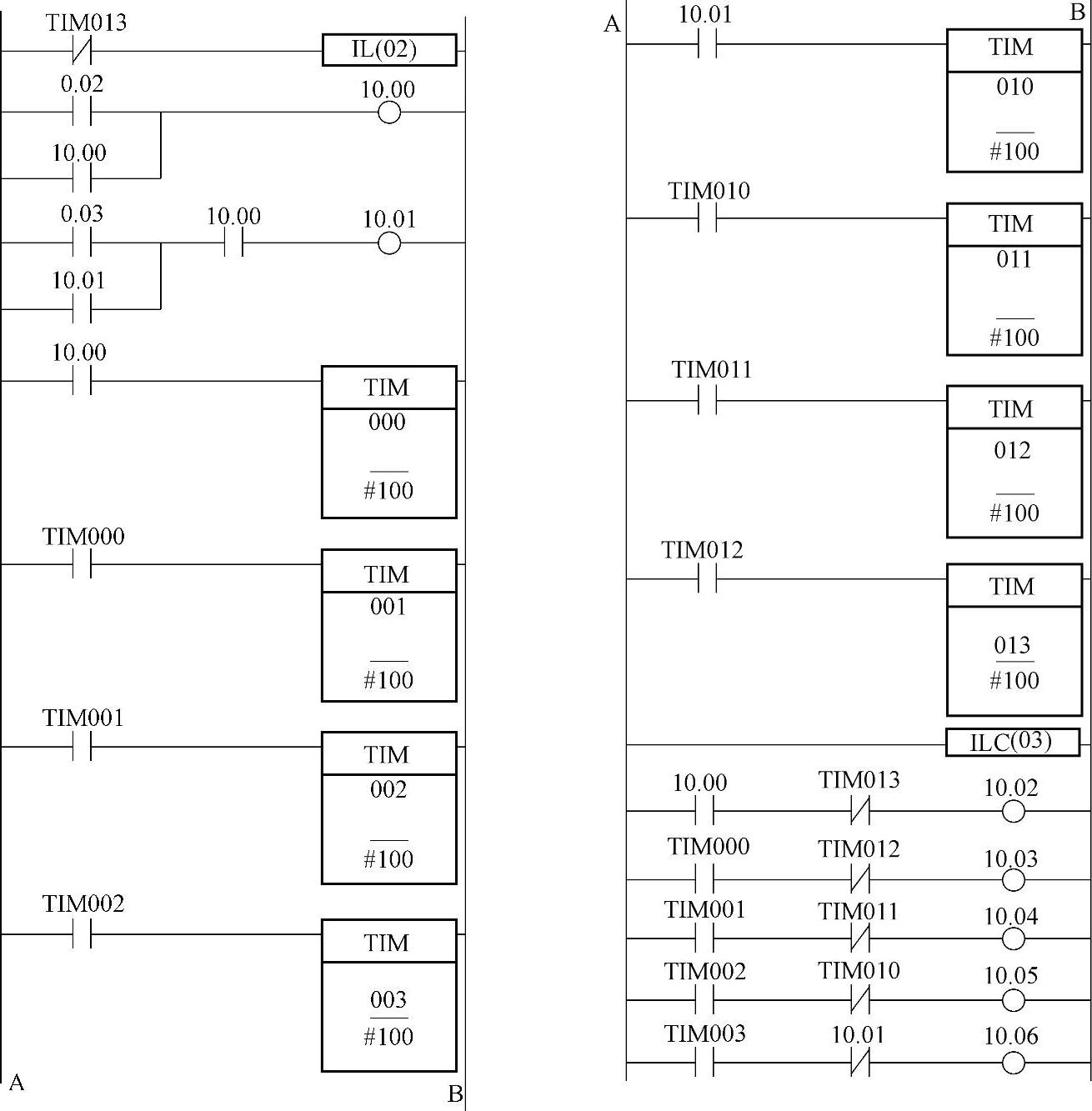
图2-47 顺序起、逆序停梯形图程序
流程图算法的方便实现可用步(进)指令,PLC多有这个步指令。如实在无步指令,也可用移位、或基本的逻辑指令处理。只是效率较低,也稍麻烦些。此外,用顺序流程图语言也适合于它的编程。
常见流程图如图2-48所示。
(1)顺序流程
图2-48a为顺序流程序。其进程是确定的,只有前一步骤进行后,建立了相应条件,其后续才可继而进行。
(2)条件分支流程
图2-48b为条件分支程序。它依条件不同而改变程序流程。这对应于随机电路。
(3)平行分支流程
图2-48c为平行分支程序。它依条件可进入平行的两个程序流程。
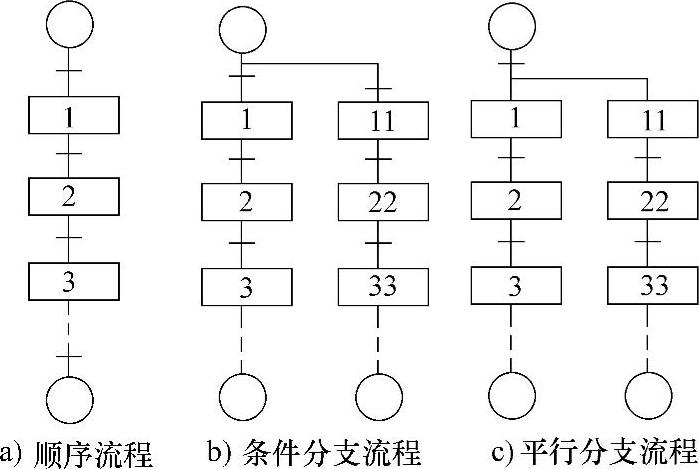
图2-48 三种流程图
此外,还可能有循环流程。它的进程达到终点时,又返回到起点。
流程图法适合于动作步骤清晰的系统的控制逻辑设计。它的每一步对应一个动作,而步的转换,则看条件是否满足。所以,流程图画出来了,要求有多少步也就清楚了,而步的转换,有了条件也好设计。
2.流程图法设计步骤
1)依控制对象的工作过程,划分动作步,画动作顺序图。这是动作顺序的图形表示。
2)分配与动作对应的输出地址。分配与步转换条件对应的输入地址。
3)根据动作顺序图设计流程图。要把方框,即动作与O(输出)联系,而条件,即短横线与I(输入)联系。这个图应尽可能详尽,以便于进一步设计。
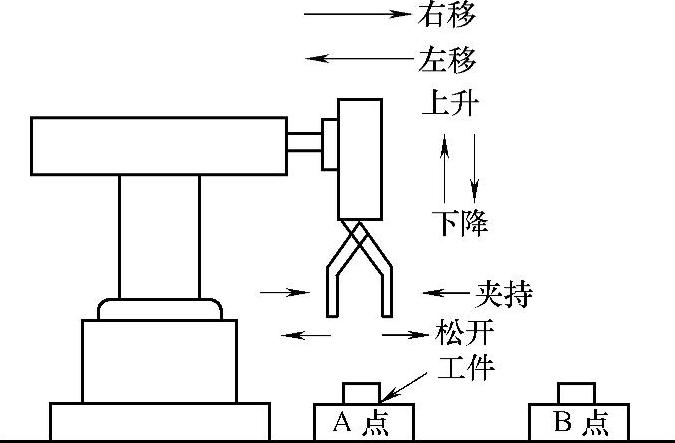
图2-49 机械手工作简图
4)建立步进逻辑程序。如果PLC有步进指令,可用它建立这个程序。若没有,可用移位指令,或直接用逻辑控制指令建立。
5)建立各个的步输出与输入逻辑,以实现控制输出与反馈输入。
3.流程图算法程序实现
以下以图2-49所示机械手工作控制为例,介绍这个算法的程序实现。
图2-49所示为机械手工作简图。其工作过程为:机械手向下,直到A点→夹取工件→上升→右进→下降,直到在B点→松开工件→上升→左退到原位、停止工作。若夹取不到工件,则从A点上升后,不右进,并报警,提示无工件。其设计过程如下:
(1)划分动作步
根据设计要求,本例的动作步简图如图2-50a所示。
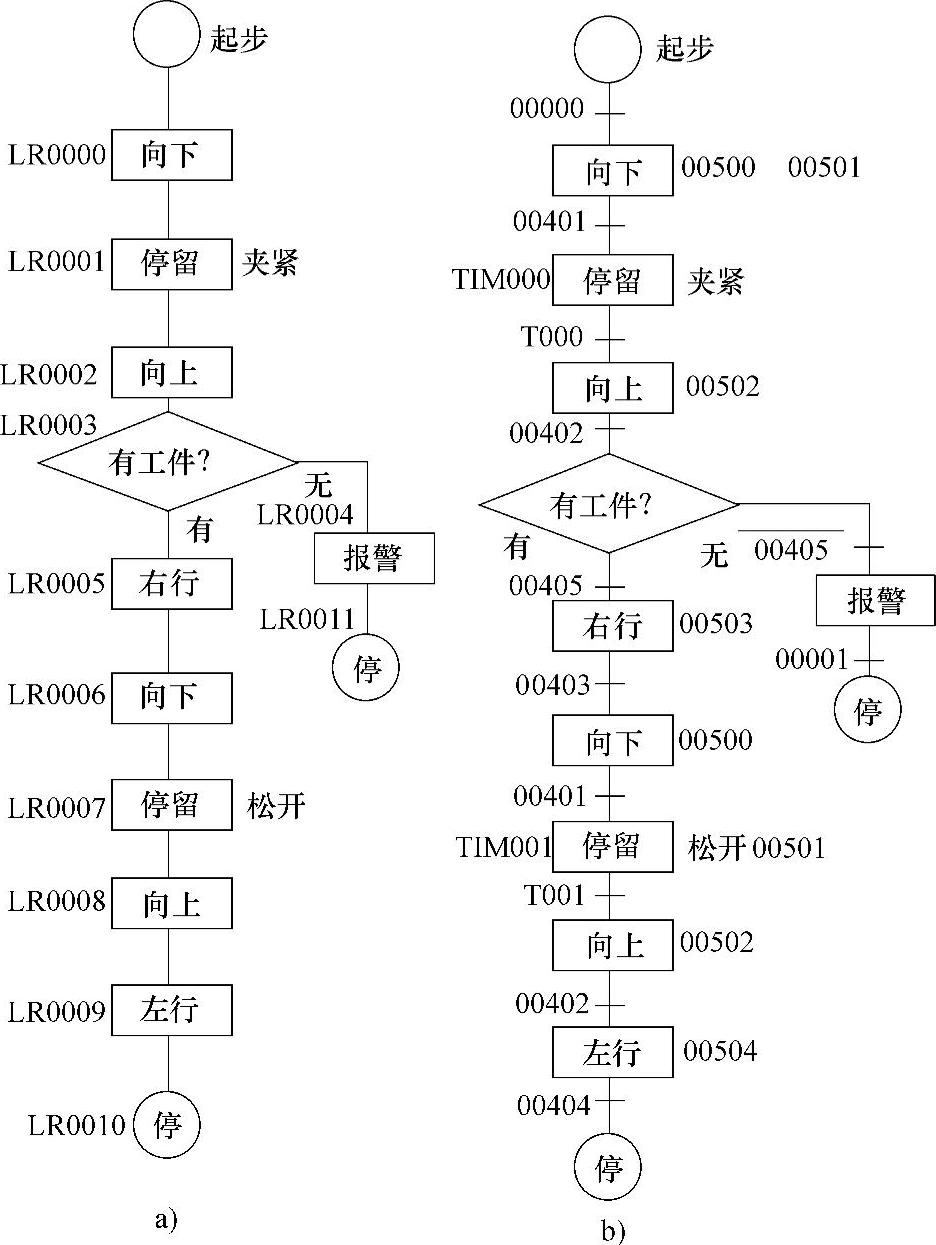
图2-50 机械手动作过程简图
弄清了设计要求,完成这一步是不难的。只是在这个图上,还要标上进入该步要用的继电器地址。即如图所示LR000、LR001等。
(2)分配输入输出地址(https://www.xing528.com)
本例的动作(输出)分配如下:
下降——00500ON,下降;OFF,下降停止。
上升——00502ON,上升;OFF,上升停止。
夹紧是用弹簧实现的。0501ON弹簧松开,机械手松工件;0501OFF弹簧夹紧工件。
右移——00503 ON右移;OFF,右移停止。
左移——00504 ON左移;OFF,左移停止。
本例的条件(输入)分配如下:
下限位开关——00401 ON,达下位;OFF离开下位。
上限位开关——00402 ON,达上位;OFF离开上位。
有工件——00405 ON,有工件夹住;OFF,无工件。
右限位——00403 ON,达右位;OFF,离右位。
左限位——00404 ON,达左位;OFF,离左位。
起动——00000 ON起动。
(3)根据动作顺序图设计流程图
图2-50b所示为本例的流程图。与动作简图相比,该图要标注控制输出及反馈输入。从该图可知;
起动后(00000 ON),即进入第一步。这时00500 ON、00501 ON,可使机械手松开,并下降,准备抓取工件。
达到下位(00401 ON)后,使00500、00501 OFF,下降停止,并夹紧工件。为可靠计,应令其延时2s,可以保证夹住工件。为此,此时起动定时器TIM000。定时器定时到,使机械手上升,即0502 ON。
到达上限,即00402 ON后,上升停。判断机械手是否夹到工件。若无工件,00405OFF,它的常闭触点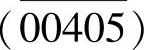 ,即00405的非为 ON,这时产生报警,机械手不再工作。此时,如使00001 ON,可停止报警,并使步进程序结束;若有工件,00405 ON,则机械手右移(00503 ON)。
,即00405的非为 ON,这时产生报警,机械手不再工作。此时,如使00001 ON,可停止报警,并使步进程序结束;若有工件,00405 ON,则机械手右移(00503 ON)。
右移到右位,00403 ON,右移停止,并开始下降,即00504 ON。
下降到下限位,00401 ON,00501 ON,松开。为可靠松开,也延时2s。为此起动定时器TIM001。
TIM001时间到,则00501 OFF,并使00502 ON。前者机械手又夹紧,但已无工件,无关紧要。后者使机械手上升。
到上限位,00402 ON,上升停,并00504 ON,左移。
到左限位,00404 ON,左移到,步进程序结束。又等待00000新命令,再起动新的过程。
(4)建立步进逻辑程序
本例用欧姆龙PLC控制。用它的STEP及SNEX两条步进指令建立步进逻辑程序,如图2-51所示。
从图2-51知,它共有9步。即STEPLR0000~LR0008。另外还有两个停止步,即不带标号的STEP,分划处在SNXTLR0011及SNXTLR0010之后。这意味着,只要执行这两条SNXT,步进程序即行结束。
再者,这里的第4步,即STEPLR0003,有2个分支,用00405的 ON或OFF区分。 ON则转为STEP LR0005,机械手右移。而00405OFF则转为STEPLR0004,报警。若此时使00001 ON,报警停,也使步进程序结束。
(5)用梯形图建立各个的步输出与输入逻辑
具体如图2-51所示。
用步进指令和流程图法进行程序设计是很方便的。而且,为未起动的步,或已复位的步,程序是不扫描的,可减少程序扫描时间,提高程序运行效率。这而且,如在相关的步中,需进行其它控制也容易实现。
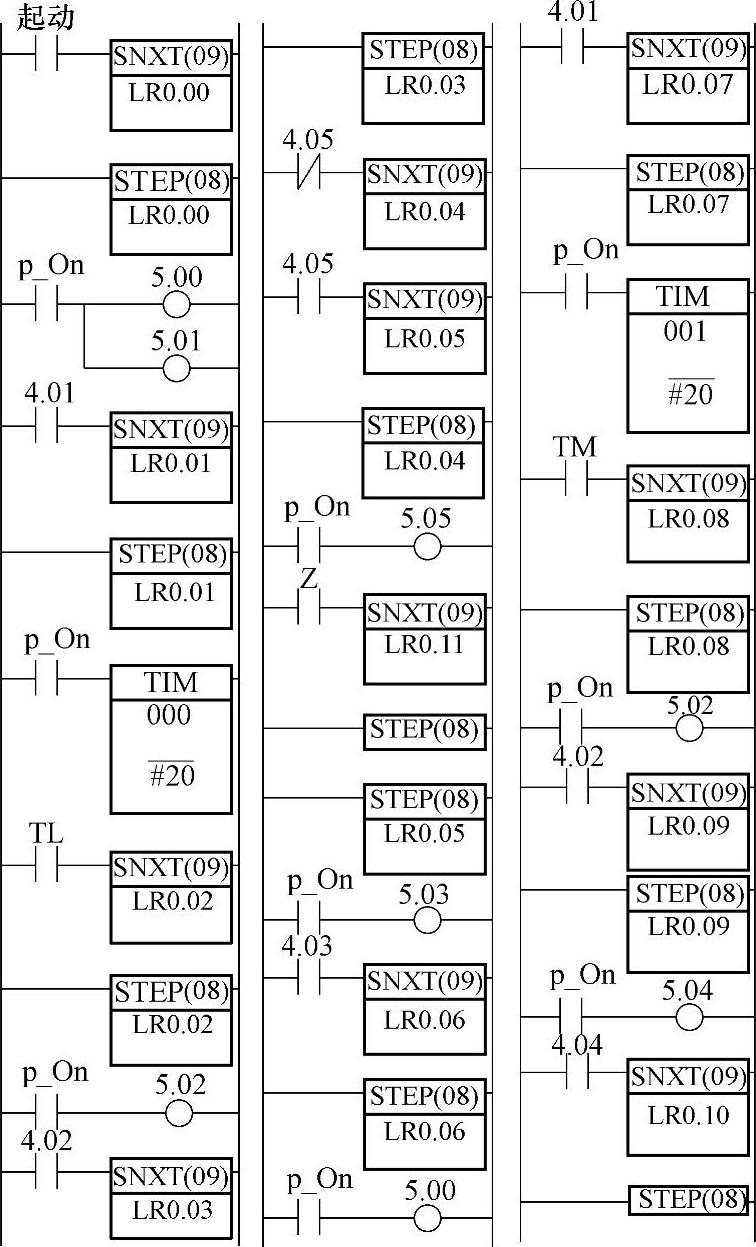
图2-51 步进逻辑程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。