



8.5.4.1 欧姆龙PLC简介
1.CPM1A系列PLC CPM1A在编程环境等方面不仅具有了以往的小型PLC所具有的功能,尽可能使安装空间最小化,并实现了具有10~100点输入、输出点数的弹性构成,而且还可以连接可编程控制终端。它不仅可以替代继电器控制柜,作为小型控制器或在传感器中应用,也能适应生产现场不同的需求。
2.CPM2A系列PLC
①高速计数器能方便地测量高速运动的加工件。
②同步脉冲控制可提供方便的脉冲比例调整。
③带高速扫描和高速中断的高速处理。
④可方便地与OMRON的可编程控制终端(PT)相连接。
⑤通过脉冲输出可实现各种基本的位置控制。
⑥可进行分散控制和模拟量控制。
⑦可以使用CPM1A的扩展单元。
3.CQM1系列PLC
产品规格:最大I/O:192点,程序容量:7.2KB。
产品型号:CQM1-CPU11/21/41/42/43/33-E。
产品介绍:
①有多种型号的CPU可供选择;
②内含RS-232-C接口;
③丰富的特殊I/O单元;
④方便的连接组合;
⑤高速处理功能;
⑥与C系列PLC兼容。
8.5.4.2 基于OMRON PLC的新型动臂吊车控制系统
吊车广泛应用于国民生产的各个行业,对于新型吊车的研发、制造、控制理论研究也进入了一个新阶段。从设计原理上进行观念性的改进由原先建筑设备静臂吊车的绞缆提升改为动臂的俯仰、提升同时动作完成重载提升的功能,这项改进将明显降低设备的制造和运行成本。
新型吊车的特点是节能、控制简便、灵活调速、精准定位、安全可靠性高等。为了实现上述功能,尤其适应国家提出的可持续发展、节能降耗。新型吊车采用了触摸屏协助操作并显示、PLC控制、变频器执行的控制方法。
1.系统组成
① PLC:本系统采用欧姆龙CJ系列PLC完成系统逻辑控制部分,负责处理各种信号的逻辑关系,从变频器及其他被控设备接收开关和模拟量信号,通过运算控制信号送给变频器及其他被控设备,形成双向联络关系,是系统的核心。
② 触摸屏:选用欧姆龙的NS系列触摸屏作为显示和控制的终端设备,显示各被控设备的工作状态。
③ 变频器:欧姆龙通用变频器3G3RV-B4450-ZV可实现平稳操作和精确控制,使电动机达到理想输出,并将无PG的U/f控制、无PG矢量控制、有PG的U/f控制、有PG矢量控制的四种控制方式融为一体,其中有PG矢量控制是最适合吊车控制要求的。容量选择最好是采用大一数量级选配,本系统中吊车电动机采用37kW的异步电动机,因此选45kW的变频器。电气原理图如图8-38所示。
④ 旋转编码器和PG卡:为满足吊车的要求,变频器要通过与电动机同轴连接的旋转编码器和PG卡完成速度检测及反馈形成闭环系统。旋转编码器与电动机同轴连接,对电动机进行测速。旋转编码器输出A、B两相脉冲,根据A、B脉冲的相序可判断电动机转动方向并根据其频率测得电动机的转速旋转编码器将此脉冲输出给PG卡,PG卡将此反馈信号送给变频器内部,进行运算调节。PG卡选择PG-B2。光电编码器选用增量式600P/r、放大输出、A相B相C相原点信号、轴径中空型的编码器。
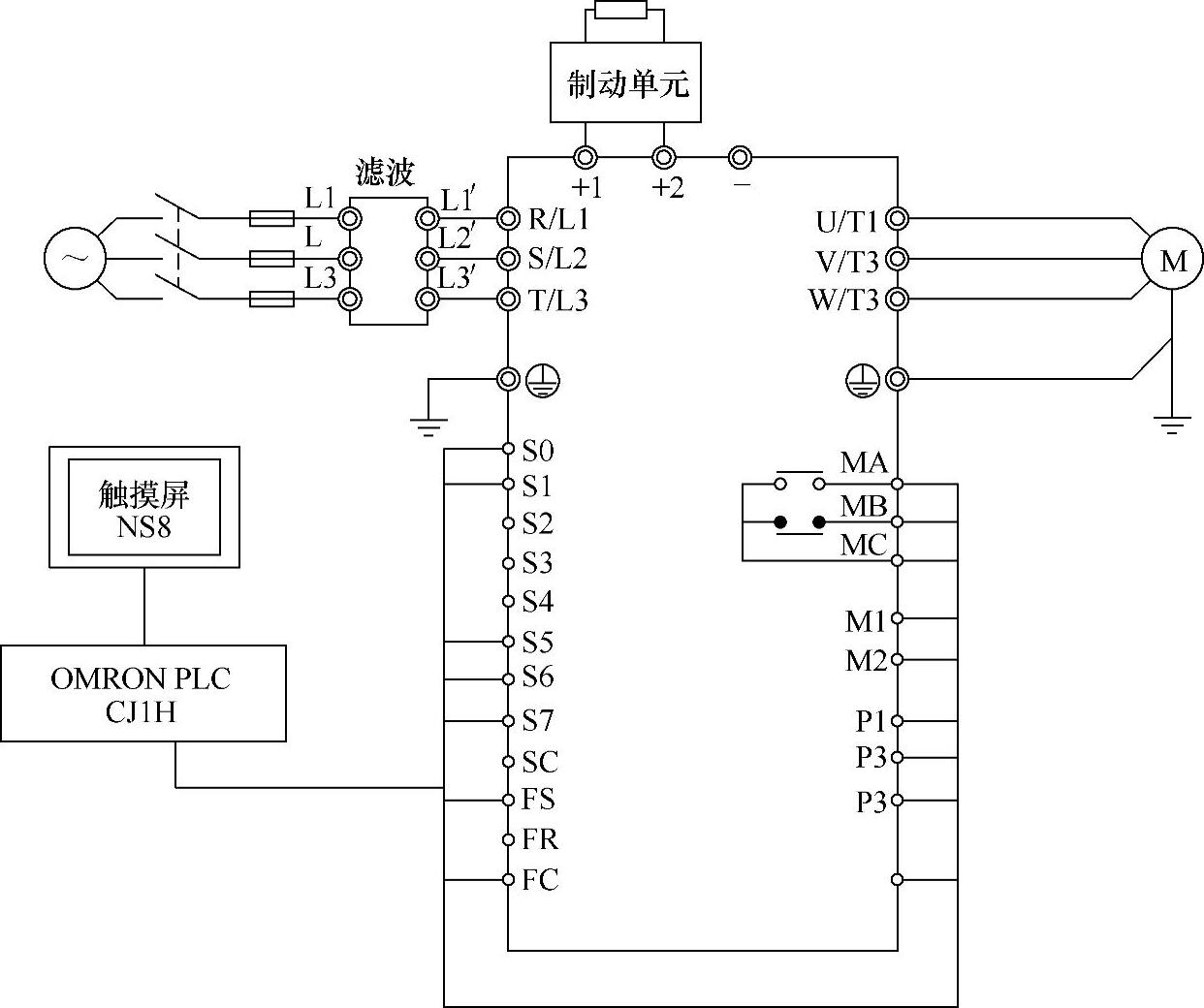
图8-38 电气原理图(https://www.xing528.com)
⑤ 制动单元:在变频器应用中当吊钩空载上升或重载下降时,拖动系统存在位能负荷下放,电动机将处于再生发电制动运行状态,使回馈的能量通过逆变环节中并联的二极管流向直流环节给滤波电容器充电。当回馈能量较大时会引起直流环节电压升高发生故障,电动机急速减速也会造成上述现象。解决办法是在变频器直流环节并联制动单元和制动电阻。制动单元是变频器一个可选组件,内设检测和控制电路,工作时对变频器的直流回路电压进行在线检测,当电压超过设定允许值时,触发制动器晶体管导通,经电阻释放能量,维持变频器的直流母线电压在正常值内。一个制动单元可并联几个电阻,视工况而定。
⑥ 制动电阻:制动电阻消耗回馈电能抑制直流电压升高。当吊车减速运行时,电动机处于发电状态,向变频器回馈电能,这时,同步转速下降,交-直-交变频器的直流母线电压升高,为了能消耗回馈电能,抑制直流电压升高必须配置制动电阻。
电阻的选择非常重要,电阻选择过大则制动力矩不足,选择过小则电流过大、电阻发热等问题难以解决。一般推荐电阻功率和阻值选择,对于提升高度较大、电动机转速较高的情况可以适当减小电阻以得到较高的制动力矩;如果最小值不能满足制动力矩的话,要更换大一级功率的变频器。制动单元和制动电阻应根据回馈最大能量及时间来选用。一般制动电阻器的选择应使制动电流Is不超过变频器的额定电流Ie,制动电阻最大功率Pmax要小于1.5倍的变频器功率与过载系数相乘。过载系数与减速时间和持续制动时间有关,具体要厂家提供电阻器过载系数及参数样本。采用制动电阻消耗电动机再生制动时送回直流回路的电能,制动过程中,当直流电路电压高于正常电压70V时,制动单元进行直流斩波,使制动电阻流过电流消耗再生电能。
2.其他配件选择
(1)交流电动机:
三相异步电动机
铭牌:50Hz、70A、37kW、380V、1470r/min。
(2)旋转编码器:
渡边旋转编码器600P/r、电压DC17~30V。
输出信号:A+、B+、C+、A-、B-、C-。
(3)液压制动器。
(4)电磁制动器。
(5)电磁离合器。
3.控制方法及变频器设置
①PLC控制方法:本系统采用欧姆龙PLC数字量及模拟量控制。具体控制方式如下:
输入信号:变频器运行信号、报警信号、频率模拟量输入、手柄模拟量输入、外部制动信号输入等;
控制对象:变频器运行信号、零伺服信号、频率模拟量、外部制动开关信号等;
串行通信:与欧姆龙NS触摸屏进行数据通信。
②变频器设置:根据实际应用的欧姆龙变频器3G3RV-B4450-ZV1,系统的结构特点及程序设计要点,采用PLC作为逻辑控制部件变频器和PLC通信时采用模拟量。由于3G3RV-B4450-ZV1为通用型变频器,因而用在吊车控制上为了满足运行效率、灵活调速、精准定位和安全可靠的要求,其参数设置比专用型变频器要复杂得多。下面仅介绍几个主要参数的设置:
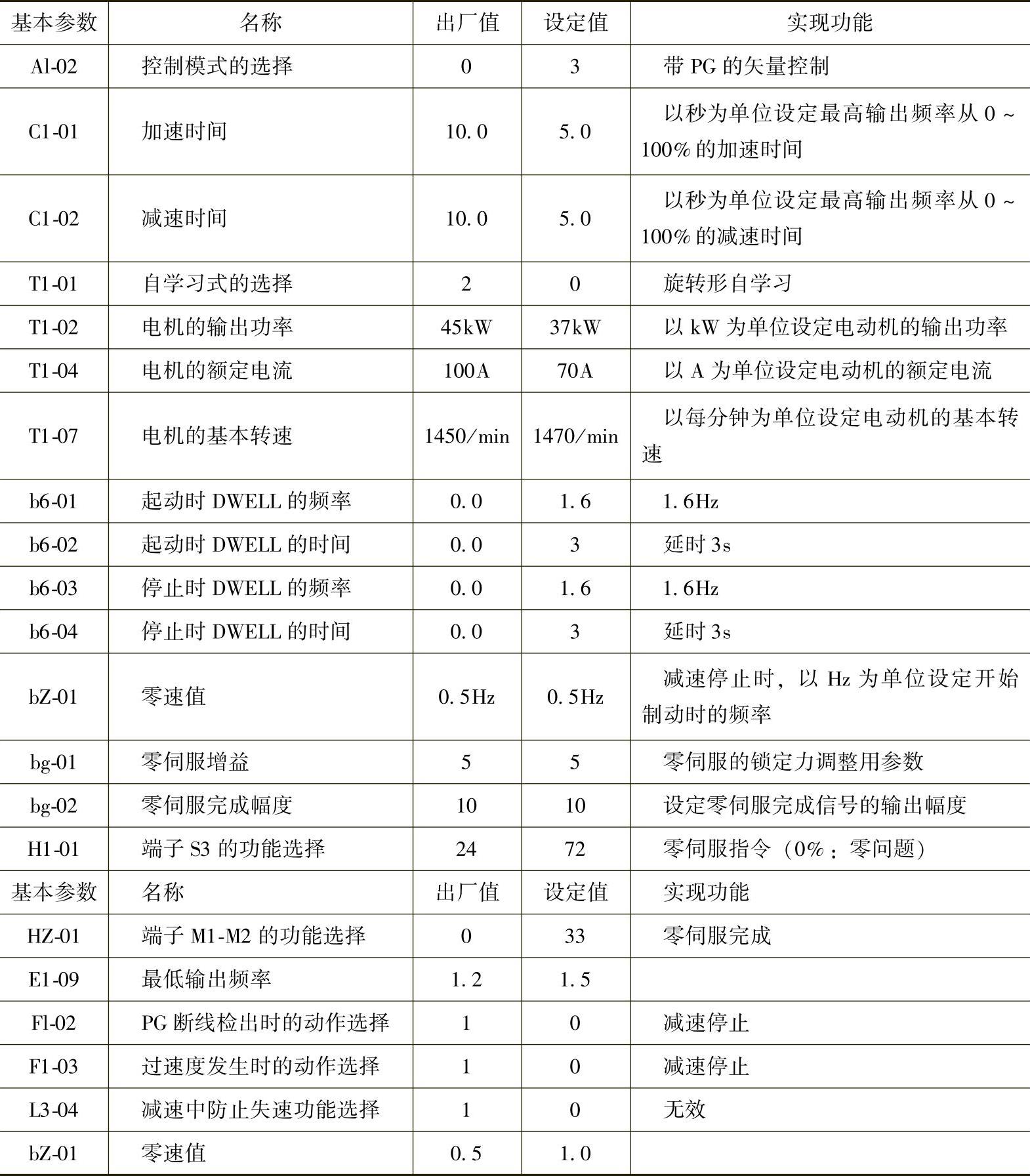
曳引电动机的转速控制应是闭环的,其转速的检测由和电动机同轴旋转的旋转编码器完成,必须保证旋转编码器和电动机连接时的同心度和可靠性,以保证速度采样的准确度。变频器其他常用参数可根据电网电压和电动机铭牌参数直接输入,也可通过自学实现,本系统是采用自学方法读入电动机参数,可以使变频器工作在最佳状态。具体方法:在完成参数设置后,使变频器对所驱动的电动机进行自学习,将曳引机制动轮与电动机轴脱离,使电动机处于空载状态,然后启动电动机,变频器便可自动识别并存储电动机有关参数,使变频器能对该电动机进行最佳控制,至此,变频器参数设置完毕。软件设计主要参数设置见表8-8。
其他参数按变频器出厂值设置。
表8-8 软件设计主要参数设置
4.设备调试出现的问题分析及解决
(1)开始开机送模拟量缓慢,运行不正常。
解决方法:PLC先提供给变频器正转/反转信号,然后提供模拟量。
(2)处于零伺服时再起动异常。
解决方法:变频器处于零伺服状态下不能够再起动,程序中做零伺服状态下禁止操作。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。