



1.G11S系列变频器构成 如图7-36所示。它为交-直-交电压型变频器,主要由二极管整流、逆变器、控制器三部分组成。
2.变频器的控制方式 异步电动机调速传动时,需要根据电动机的特性对供电电压、电流、频率进行适当的控制。
变频器具有这样控制功能:它采用不同的控制方式,所得到的调速性能、特性及用途是不相同的。
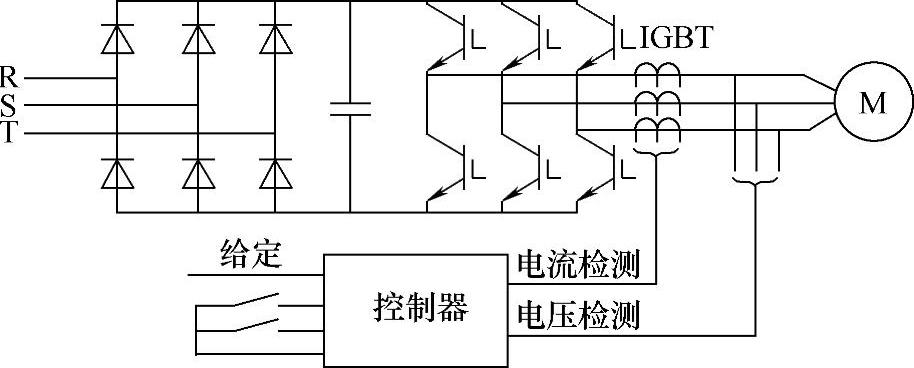
图7-36 G11S系列变频器简图
控制方式一般分为三种:U/f控制、转差频率控制和矢量控制。转差频率控制和矢量控制一般都是闭环控制,需要测速反馈,控制性能较U/f控制优良,特别是矢量控制,可以实现与直流电动机电流控制相媲美的传动性能。但与此同时,由于控制内容复杂化、对电动机有特殊要求等使成套装置的价格提高了,所以目前只用于有特殊要求的专用机器上。因此,在系统中,G11S系列变频器虽有U/f控制和矢量控制两种控制功能,但也只能实用U/f控制方式。
3.U/f控制 U/f控制是这样一种控制方式:改变频率的同时控制逆变器的输出电压成正比例变化,使电动机磁通保持恒定,在整个调速范围内,使电动机的效率、功率因数不下降。
U/f控制是转速开环控制,无需测速反馈,控制电路简单,负载可以是通用标准电机,所以通用性能强、经济性好,是目前通用变频器产品中使用较多的一种控制方式。其控制的构成如图7-37所示。
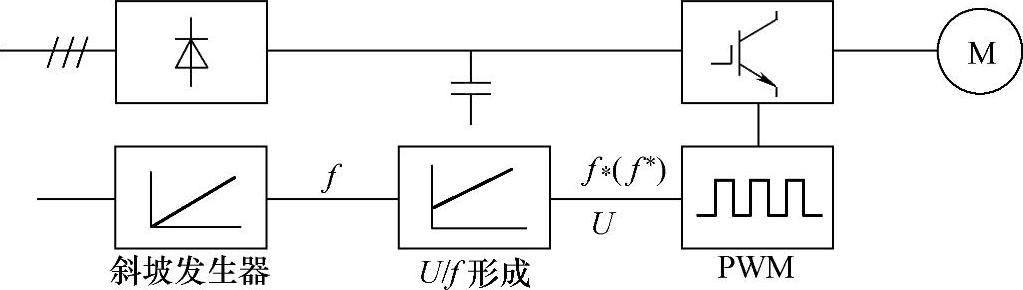
图7-37 U/f控制方式
变频器的控制脉冲发生器PWM同时受控于频率设定值f∗和电压指令U,而f∗与U之间的关系是由U/f曲线发生器决定的,经PWM控制之后,变频器的输出频率f、输出电压U之间的关系,就是U/f曲线发生器所确定的关系。由图7-37可见,转速的改变是靠频率的设定值f∗实现的,电动机的实际转速要根据负载大小即转差的大小来决定。负载变化时,在f∗不变的情况下,转子速度将随负载转矩变化而变化,故它常用于速度精确要求不十分严格或负载变动较小的场合。(https://www.xing528.com)
4.直流制动在准确定位中的作用 通用变频器向异步电动机的定子通直流电流,异步电动机便处于能耗制动状态,这种情况下,变频器的输出频率为零,异步电动机的定子磁场不再旋转,转动着的转子切割这个静止磁场而产生制动转矩,旋转系统存储的动能转换成电能消耗于电动机的转子回路中。
这种变频器输出直流的制动方式,称为直流制动或叫DC制动。G11S系列变频器的DC制动力矩为0~100%TN,制动起始频率为0~60Hz,DC制动时间为0~30s可调。
根据前面介绍的定位过程分析(t3~t4),变频器DC制动的情况如图7-38所示。定位制动过程如下:
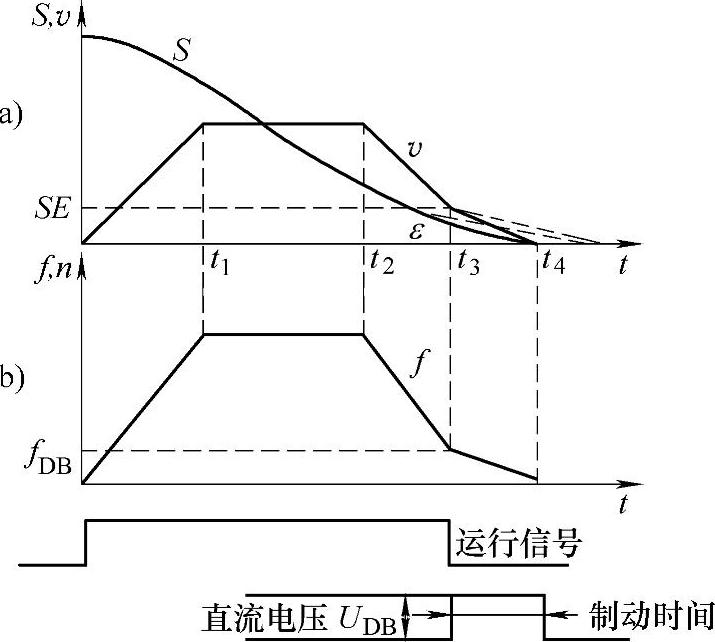
图7-38 DC制动过程
a)位控器特性 b)变频器特性
——DC制动 ---自由停车
在t3时刻,机械设备进入允许误差带2e的边缘,此时位控器速度给定值为零,相应的变频器的频率给定为零,电动机转子频率达到DC制动起始频率fDB以内,电动机进入DC制动状态,使机械快速达到准确定位点。
该系统于1996年10月投入使用以来,其运行状况和定位效果都很好,综合定位精度小于1.5mm,最大定位时间(0~±1000mm)小于17s。各项性能指标远高于工艺设备要求。在调试中发现,系统的定位精度主要取决于机械设备的加工精度(如丝杠)和调整精度。
用位置控制器与变频器构成的APC系统,具有设计和调试容易、使用方便、通用性能强、定位性能好、投资省等优点,可广泛用于定位精度要求不是很高的场合。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。